

Control method of electric power steering system based on phase compensation
Article Text (Baidu Translation)
-
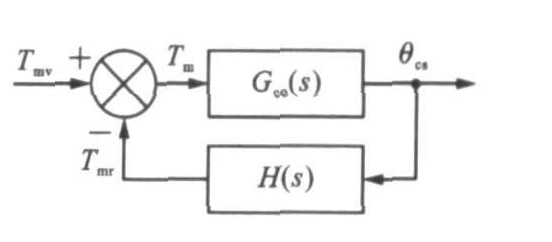
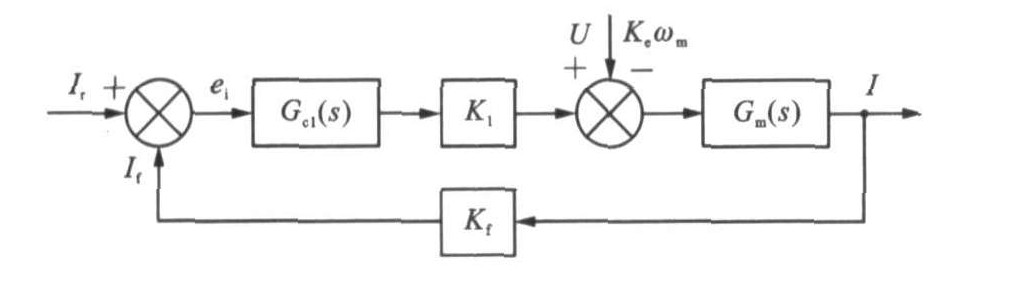
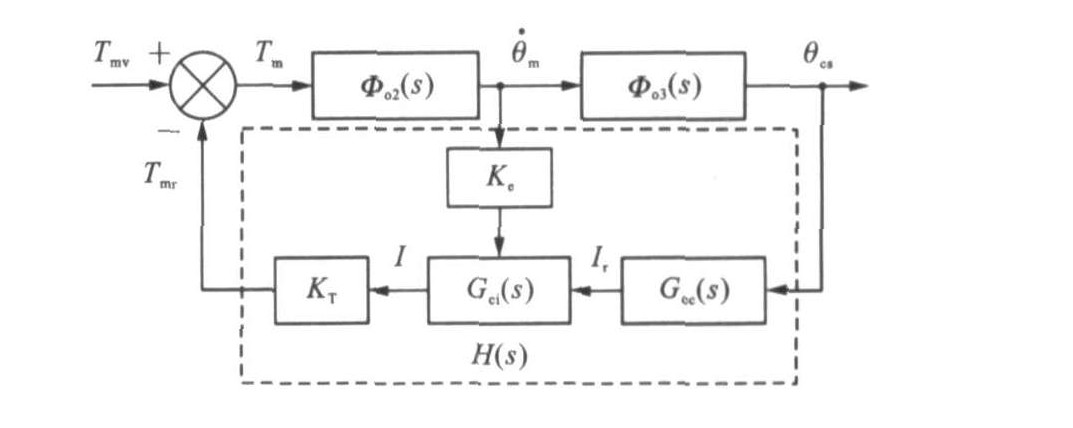
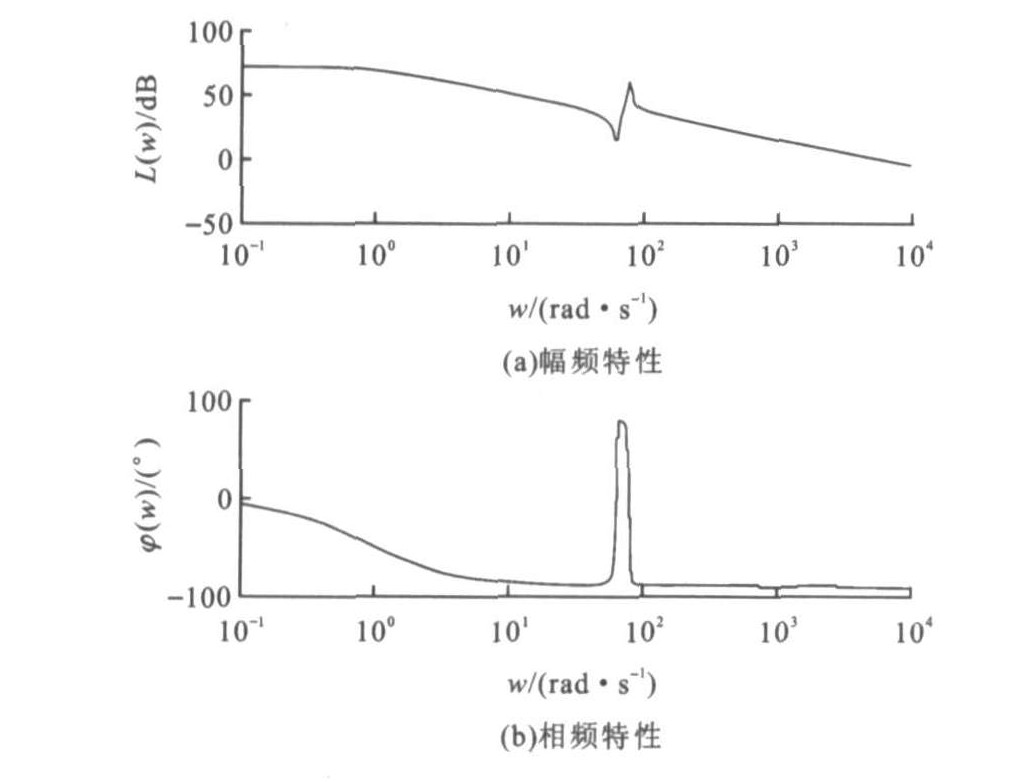
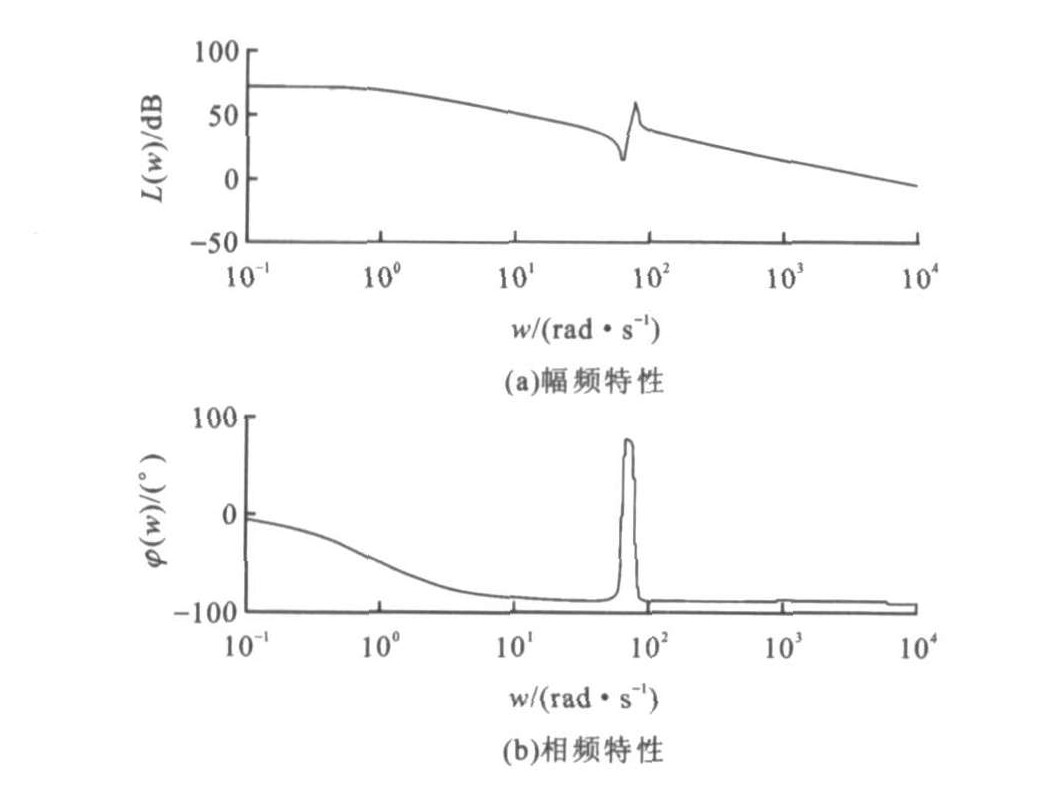
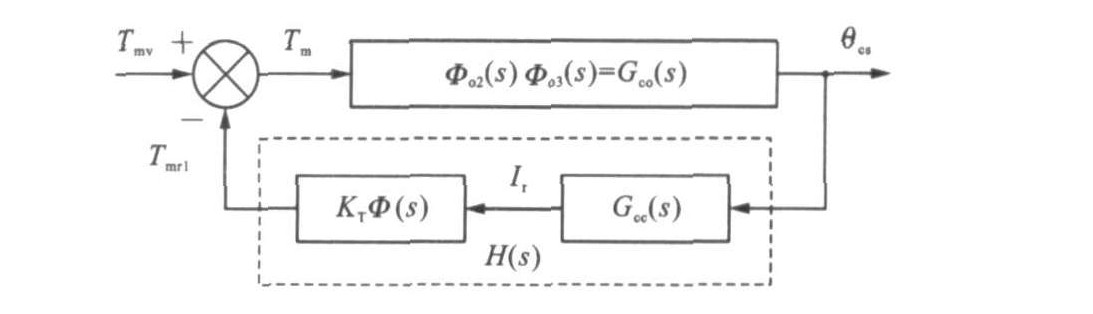
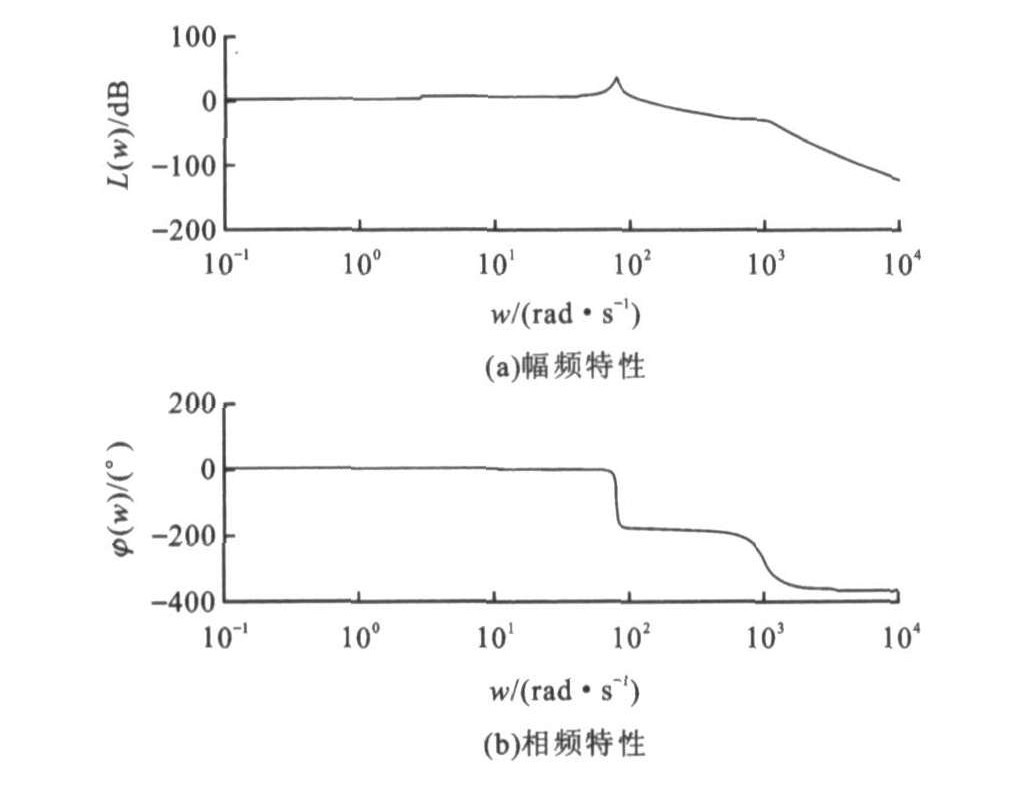
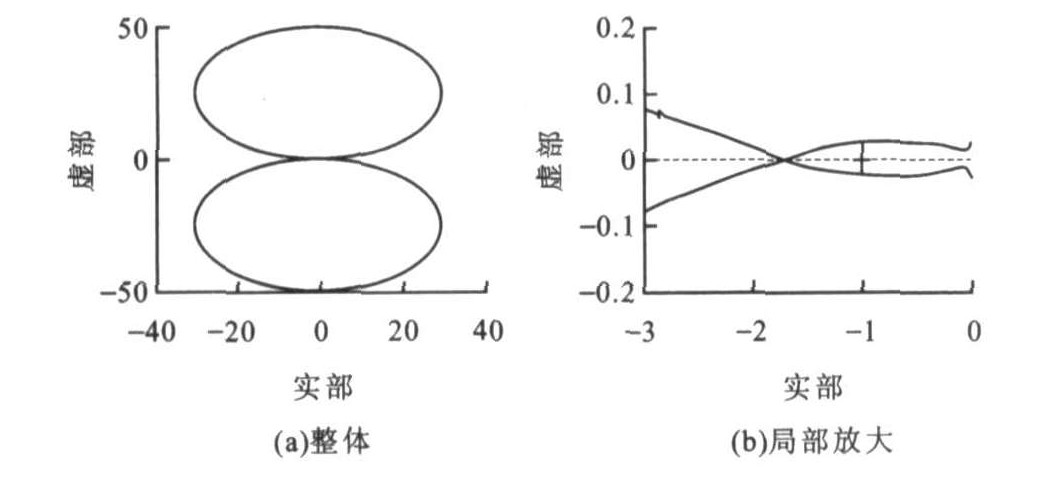
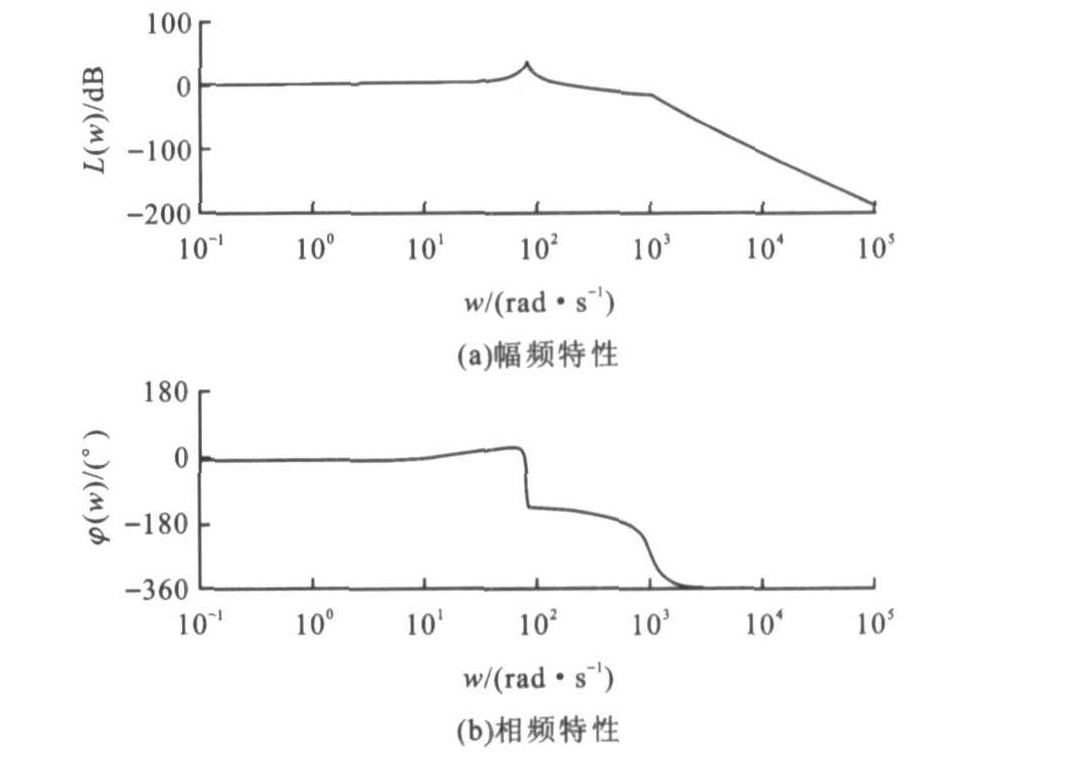
摘要: 采用动力学与控制理论, 研究了具有3个集中质量的电动助力转向系统的物理和数学模型, 建立了总体结构图, 在对外环特性进行分析的基础上, 对总体结构图进行等效变换, 根据系统要求对控制系统进行了设计, 研究了控制对象的传递函数、控制系统的结构图、开环系统的Bode图、Nyquist图以及系统的稳定性, 并进行了台架试验。研究发现控制系统的结构图可以表示为内、外两环结构, 内环包含了反电动势的反馈通道, 采用快速比例积分(PI)控制的内环, 可以忽略反电动势, 没有进行相位补偿的系统幅值裕度和相位裕度约为负值, 稳定性较差, 而进行相位补偿后系统的稳定性较好。结果表明在系统低频共振频率范围内采用超前校正, 提供相位补偿是解决电动助力转向系统振动和稳定性的有效方法。Abstract: The physical and mathematic model of electric power steering system with three lumped masses was studied by dynamics analysis and control theory, and the general block-diagram of the system was established; the outer loop property of the system was analyzed, then the general block-diagram was transformed into its equivalent counterpart, and steering control system was designed according to the system requirement; the transfer function of controlled plant, the block-eiagraph, Bode plot and Nyquist plot of the open loop system and the stability of the system were studied, and the testbed test of the system was carried out. It is pointed that the block-diagraph may be expressed by a two-loop diagraph with an inner loop including a feedback channel of back electromotive force and an outer one, back electromotive force may be ignored when a fast proportional-integral(PI) controller in inner loop was used, the gain and phase margin of the system are negative without phase compensation, the system is unstable, while phase compensation may stabilize the system. Analysis result indicates that a lead corrector with phase compensation around low frequency resonance is an effective method to stabilize the system and restrain the system vibration.
-
Key words:
- vehicle engineering /
- electric power steering /
- Bode graph /
- phase compensation /
- control
-
表 1 电动助力转向系统参数
Table 1. Parameters of EPS system
参数名称 代号 数值 转向盘的转动惯量/(kg·m2) Is 0.029 转向盘转动的运动阻尼系数/(N·m·s·rad-1) Cse 0.023 转向盘转动的变形阻尼系数/(N·m·s·rad-1) Cs 0.023 输出轴的运动阻尼系数/(N·m·s·rad-1) Cce 0.023 输出轴的转动惯量/(kg·m2) Ic 0.000 19 转向盘到减速机构蜗轮处的刚度/(N·m·rad-1) Ks 135 电动机部分的转动惯量/(kg·m2) Im 0.000 19 电动机部分转动的运动阻尼系数/(N·m·s·rad-1) Cme 0.000 092 8 电动机部分转动的变形阻尼系数/(N·m·s·rad-1) Cm 0.000 928 减速机构的刚度/(N·m·rad-1) Km 3.02 电动机的反电动势常数/(V·s·rad-1) Ke 0.050 6 电动机回路的总电阻/Ω R 0.345 电动机回路的总电感/μH L 238  下载: 导出CSV
下载: 导出CSV
-
[1] 何仁, 李强. 汽车线控转向技术的现状与发展趋势[J]. 交通运输工程学报, 2005, 5(2): 68-72. http://transport.chd.edu.cn/article/id/200502017He Ren, Li Qiang. Current status and development tendency of automobile steer-by-wire system[J]. Journal of Traffic and Transportation Engineering, 2005, 5(2): 68-72. (in Chinese) http://transport.chd.edu.cn/article/id/200502017 [2] 苗立东, 何仁, 徐建平, 等. 汽车电动转向技术发展综述[J]. 长安大学学报: 自然科学版, 2004, 24(1): 79-84. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200401020.htmMiao Li-dong, He Ren, Xu Jian-ping, et al. Reviewon auto-motive electric power steering system development[J]. Journal of Chang an University: Natural Science Edition, 2004, 24(1): 79-84. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200401020.htm [3] 卞学良, 宋宝安, 王志强, 等. 麦弗逊悬架转向机构优化设计[J]. 中国公路学报, 2003, 16(2): 108-111. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200302026.htmBian Xue-liang, Song Bao-an, Wang Zhi-qiang, et al. Opti-mization design of the steering mechanism for MC PHERSON strut in automobile[J]. China Journal of Highway and Transport, 2003, 16(2): 108-111. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200302026.htm [4] Kurishige M, Kifuku T. Static steering-control system for electric-power steering[J]. Mitsubishi Electric Advance: Automobile-Human Technology Edition, 2001, 94(6): 18-20. [5] Osuka A, Matsuoka Y, Tsutsui T, et al. Development of pinion-assisted type electric power steering[J]. Koyo Engineering Journal: English Edition, 2002, 161(1): 46-51. [6] Kozaki Y, Hirose G, Sekiya S, et al. Electric power steering(EPS)[J]. NSK Technical Journal Motion & Control, 1999, 6(1): 9-15. [7] Patrick S. Numerical simulation of electric power steering(EPS)system[J]. Koyo Engineering Journal: English Edition, 2002, 161(1): 52-56. [8] Kifuku T, Wada S. An electric power-steering system[J]. Mitsubishi Electric Advance: Automotive Electronics Edition, 1997, 78(3): 20-23. [9] 苗立东. 节能型电动助力转向系统的减振研究[D]. 镇江: 江苏大学, 2005. [10] 高国燊, 余文. 自动控制原理[M]. 广州: 华南理工大学出版社, 1999. -




 点击查看大图
点击查看大图

图(13) / 表(1)
计量
- 文章访问数: 668
- HTML全文浏览量: 264
- PDF下载量: 326
- 被引次数: 0
