

Two-phase tabu search algorithm of unloading operation scheduling project in container wharf
Article Text (Baidu Translation)
-
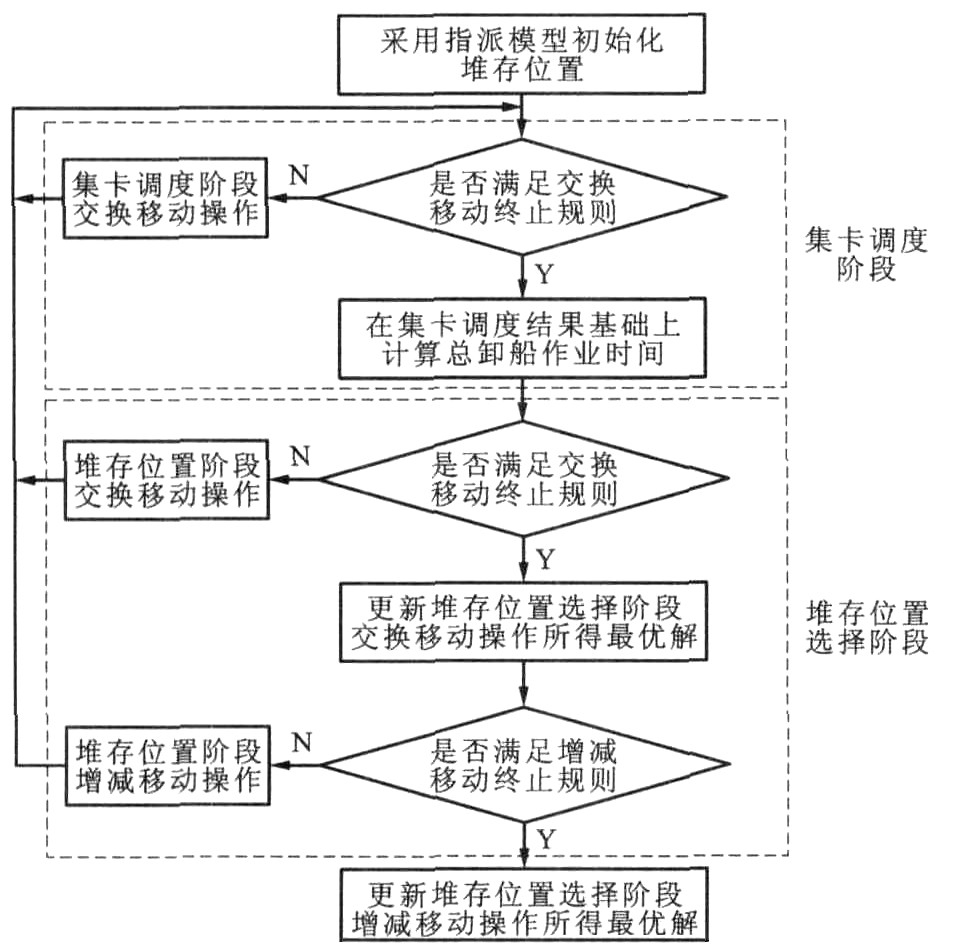
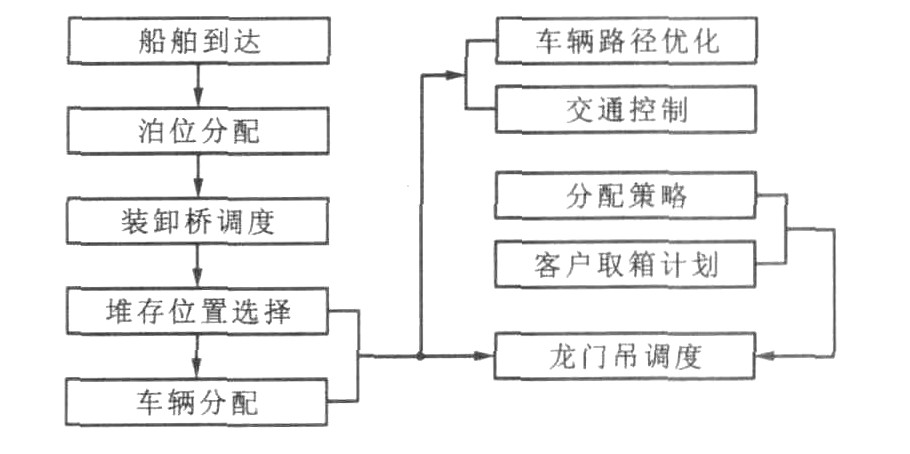
摘要: 为提高集装箱码头卸船作业效率, 建立了堆存位置-集卡调度一体优化模型, 设计了集装箱码头卸船作业调度方案两阶段禁忌搜索算法。在第一阶段, 通过禁忌搜索算法决定集装箱的堆存位置; 在第二阶段, 基于堆存方案执行另一禁忌搜索算法, 获得集卡的优化调度方案, 然后再计算卸船时间, 且将结果反馈到第一阶段的搜索过程, 通过两阶段搜索过程的反馈优化卸船调度方案。计算结果表明两阶段禁忌搜索算法可以平均减少卸船作业时间6.78%, 结果稳定。Abstract: In order to improve the unloading efficiency of container wharf, a integrated optimization model of storage location and yard trailer scheduling was developed, and a two-phase tabu search(TS) algorithm was designed to solve the model.In the first phase, a TS was performed to determine a good storage location scheme.In the second phase, for each storage location scheme obtained during the first phase, another TS was run to obtain a good yard trailer scheduling project, and then to calculated container unloading time, so as to influence the TS in the first phase.The optimal scheduling project was formed by the feedback and reciprocity between the two phases.Computation result shows that the algorithm can decrease container unloading time 6.78% in average, and the computation values are stable.
-
表 1 两阶段禁忌搜索算法计算结果
Table 1. Computation result of two-stage TS algorithm
实验脚本/TEU 初始解作业时间/min 总作业时间/min 计算时间/s 50 124 103 0.5 100 261 202 1.2 200 492 407 3.6 400 937 810 9.3 500 1 385 1 016 15.7  下载: 导出CSV
下载: 导出CSV
表 2 集卡配置数量对作业时间的影响
Table 2. Influence of trailer quantity on operation time
装卸桥数量/集卡数量 装卸桥等待时间/min 集卡等待时间/min 总作业时间/min 1/2 69 0 469 1/3 37 0 437 1/4 7 10 407 1/5 2 46 402 1/6 0 82 400
下载: 导出CSV
表 3 计算结果比较
Table 3. Comparison of computation results
实验脚本/TEU 两阶段禁忌搜索算法(1) 分别优化法(2) (1)与(2)相比 总距离/km 总作业时间/min 总距离/km 总作业时间/min 总距离之比 总作业时间之比 50 42.76 103 40.52 104 1.055 0.990 100 81.23 202 78.90 219 1.295 0.922 200 159.24 407 137.49 432 1.158 0.942 400 348.65 810 317.86 851 1.097 0.952 500 521.20 1 016 491.76 1 075 1.060 0.945
下载: 导出CSV
-
[1] Peterkofsky RI, Daganzo C F. Abranch and bound solution method for the crane scheduling problem[J]. Transportation Research: Part B, 1990, 24(3): 159-172. doi: 10.1016/0191-2615(90)90014-P [2] Ki m K H. Acrane scheduling method for port container terminals[J]. European Journal of Operational Research, 2004, 156(3): 752-768. doi: 10.1016/S0377-2217(03)00133-4 [3] Ng WC, Mak K L. Yard crane scheduling in port container terminals[J]. Applied Mathematical Modeling, 2005, 29(3): 263-276. doi: 10.1016/j.apm.2004.09.009 [4] Ng WC. Crane scheduling in container yards withinter-crane interference[J]. European Journal of Operational Research, 2005, 164(1): 64-78. doi: 10.1016/j.ejor.2003.11.025 [5] Zhang Chu-qian. Dynamic crane deployment in container storage yards[J]. Transportation Research: Part B, 2002, 36(6): 537-555. doi: 10.1016/S0191-2615(01)00017-0 [6] 李建忠. 码头堆场龙门吊起重机动态配置优化模型[J]. 交通运输工程学报, 2005, 5(1): 70-74. doi: 10.3321/j.issn:1671-1637.2005.01.017Li Jian-zhong. Crane dynamic deployment model of container yard[J]. Journal of Traffic and Transportation Engineering. 2005, 5(1): 70-74. (in Chinese) doi: 10.3321/j.issn:1671-1637.2005.01.017 [7] Zhang Chu-qian. Storage space allocation in container terminals[J]. Transportation Research: Part B, 2003, 37(10): 883-903. doi: 10.1016/S0191-2615(02)00089-9 [8] Ki m K H, Tae P K. A note on a dynamic space-allocation method for outbound containers[J]. European Journal of Operational Research, 2003, 148(1): 92-101. doi: 10.1016/S0377-2217(02)00333-8 [9] Preston P, Kozan E. An approach to determine storage locations of containers at seaport terminals[J]. Computers & Operations Research, 2001, 28(10): 983-995. [10] Nishi mura E. Yard trailer routing at a maritime container terminal[J]. Transportation Research: Part E, 2005, 41(1): 53-76. [11] Dilek T, Laura I B. A two-phase tabu search approach to the location routing problem[J]. European Journal of Operational Research, 1999, 116(1): 87-99. -

 点击查看大图
点击查看大图
图(2) / 表(3)
计量
- 文章访问数: 562
- HTML全文浏览量: 188
- PDF下载量: 272
- 被引次数: 0
