

Dynamics modeling of low-speed maglev vehicle system and simulation of its guidance mechanisms
Article Text (Baidu Translation)
-
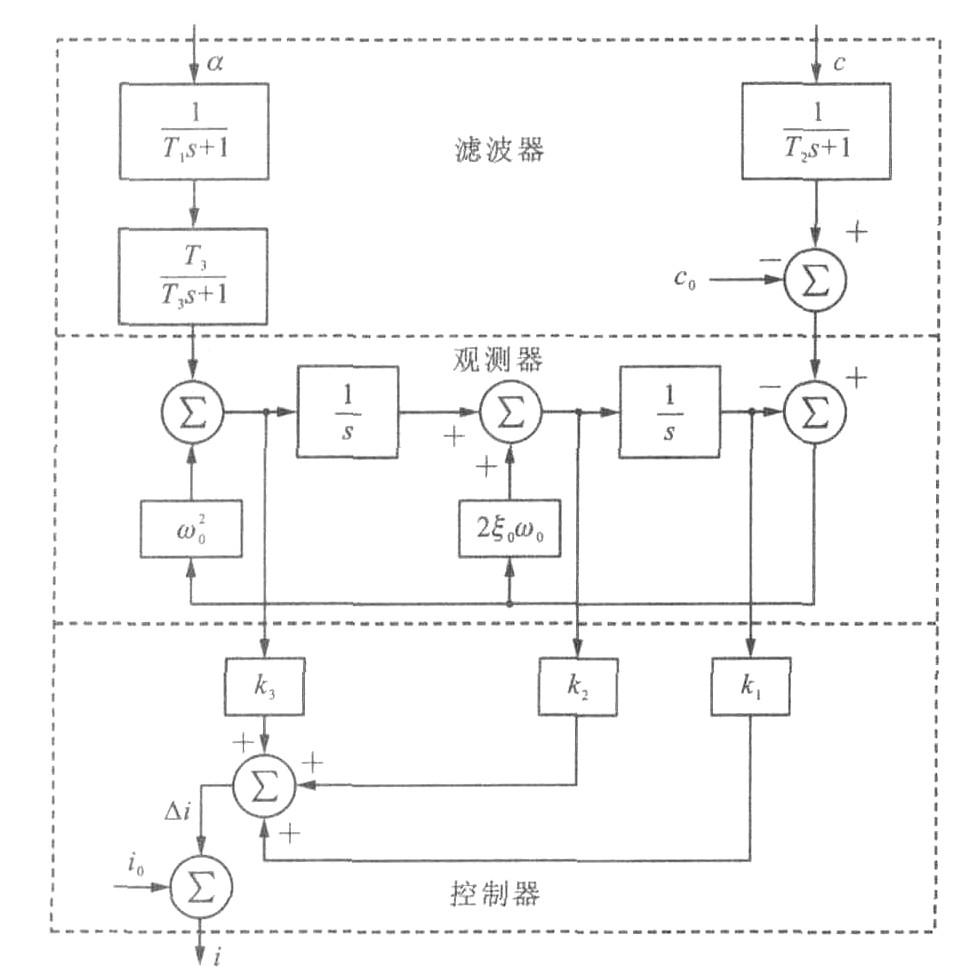
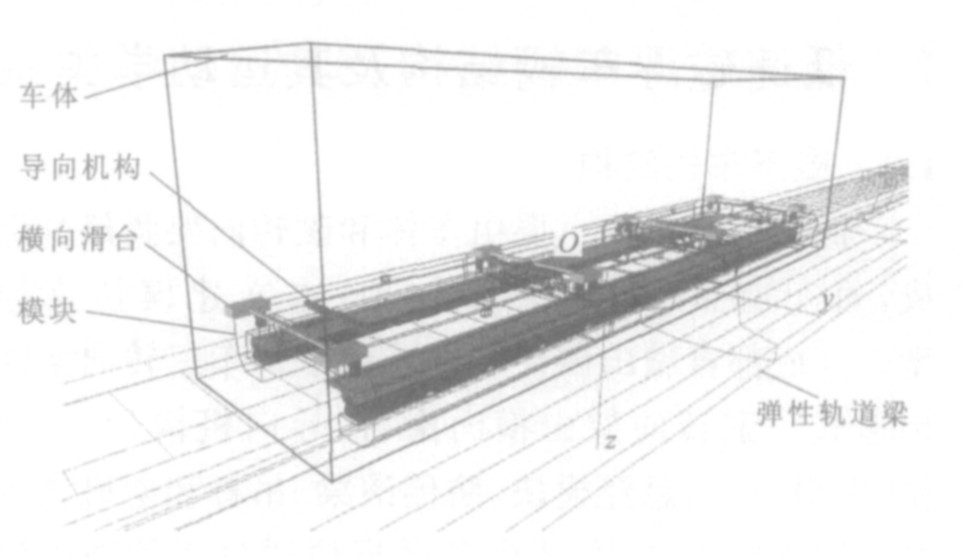
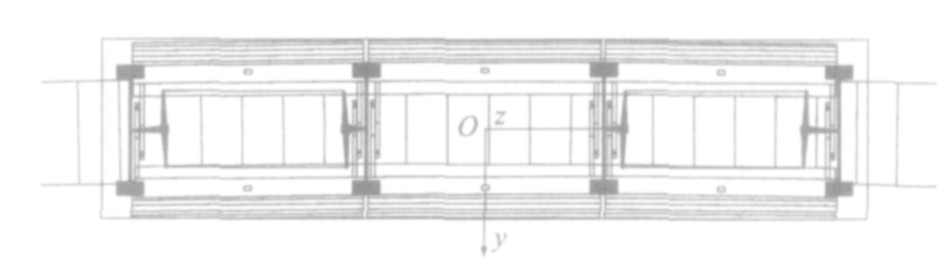
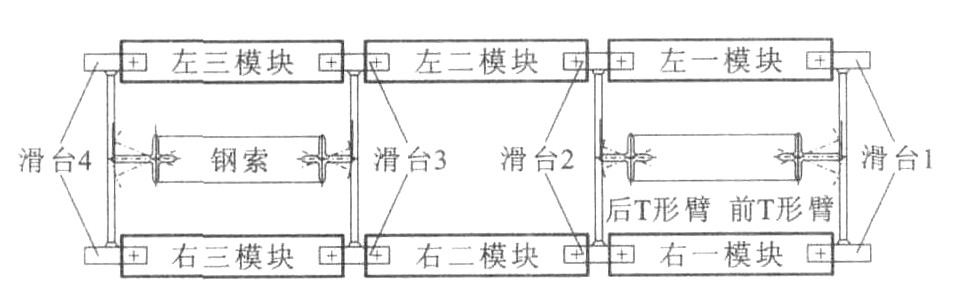
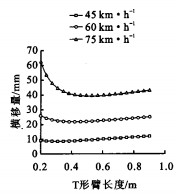
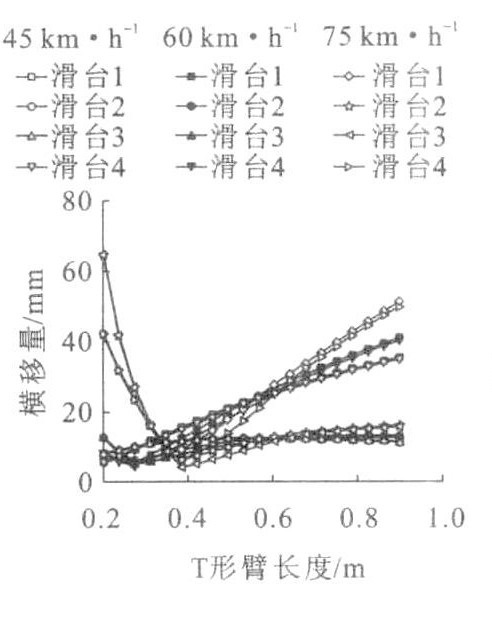
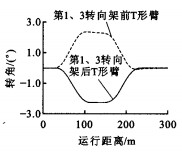
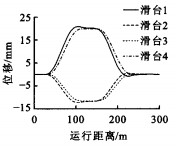
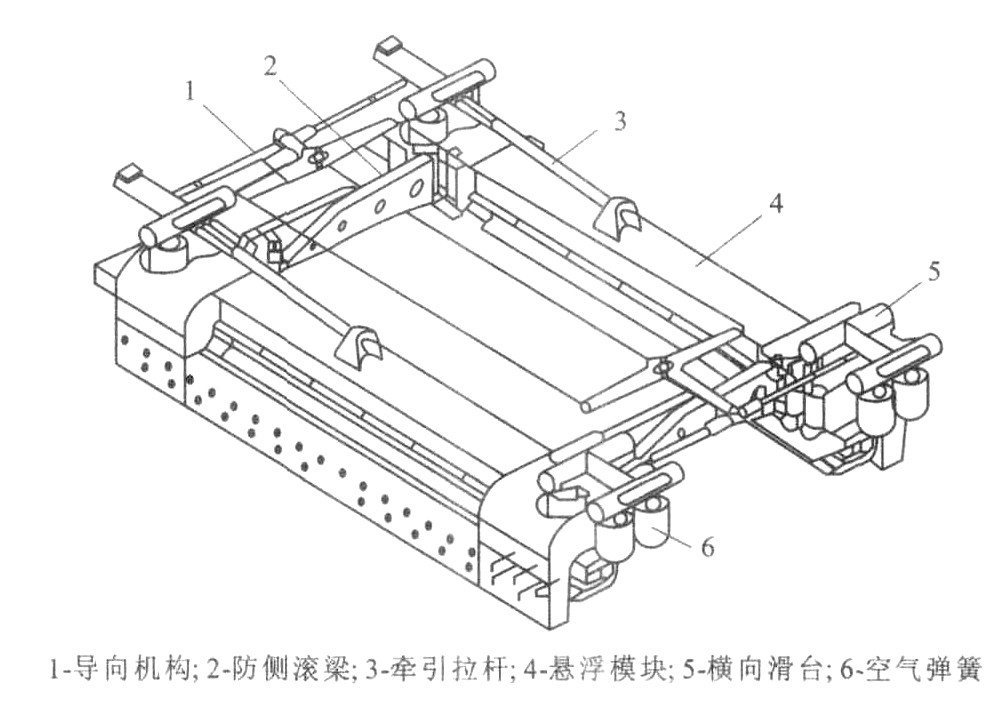
摘要: 在分析低速磁浮车辆结构及其运动学关系基础上, 利用SIMPACK软件, 建立了含主动悬浮控制的76个自由度的磁浮车辆虚拟样机模型, 开展了基于整车动力学的低速磁浮车辆导向机构仿真分析, 研究了T形臂、横向滑台及两者之间的运动学规律。仿真结果表明: 在300 m半径曲线和三转向架结构条件下, 为了保证磁浮车辆顺利通过曲线, 磁浮车辆导向机构前T形臂长度应大于后T形臂长度, 两者比值的优化区域在1.50和2.00之间; 车辆头尾T形臂相对于车体的转角幅值大小基本相同, 方向相反, 对应滑台的横向位移曲线形状与幅值基本相同; 同一转向架前后滑台的最大横移量之比等于前后T形臂长度之比。Abstract: Low-speed maglev vehicle structures and their kinematic relationship were analyzed, a 76-DOFs virtual prototype model with active levitation control was developed by SIMPACK software, the numerical simulation of guidance mechanisms was carried out based on the model, and the kinematic rules of T-shape arm and lateral skid platform and their relationship were studied. Aiming at 300 m-radius curve and three-bogies maglev vehicle, simulation result shows that the length of frontal T-shape arm of guidance mechanism should be greater than that of the rear one, and their optimum ratio ranges from 1.50 to 2.00 in order to obtain better curve negotiation performances of low-speed maglev vehicle; the yawing amplitude of head T-shape arm relative to carbody is almost equal to that of tail T-shape arm, while their directions are opposite, and the lateral displacement responses of corresponding skids have similar curves and approximate amplitudes; the amplitude ratio of the lateral displacement of frontal skid to rear skid in the same bogie equals the length ratio of corresponding T-shape arms.
-
Key words:
- vehicle engineering /
- maglev vehicle /
- guidance mechanism /
- dynamics /
- modeling /
- simulation
-
[1] 赵春发. 磁浮车辆系统动力学研究[D]. 成都: 西南交通大学, 2002. [2] 赵志苏, 尹力明, 罗昆. 磁浮列车转向机构运动分析和设计[J]. 机车电传动, 2000, 41(6): 11-13. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC200006003.htmZhao Zhi-su, Yin Li-ming, Luo Kun. Motion analysis and design for yawing mechanism of maglev vehicle[J]. Electric Drive for Locomotives, 2000, 41(6): 11-13. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCDC200006003.htm [3] 曾佑文, 王少华. 三转向架磁浮车几何曲线通过分析[J]. 西南交通大学学报, 2003, 38(3): 282-285. https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT200303009.htmZeng You-wen, Wang Shao-hua. Research on geometrical curve negotiation of three-truck maglev vehicle[J]. Journal of Southwest Jiaotong University, 2003, 38(3): 282-285. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XNJT200303009.htm [4] 洪华杰, 李杰, 李淑娟. 基于虚拟样机的磁浮列车运动学仿真分析[J]. 机车电传动, 2005, 46(2): 40-44. doi: 10.3969/j.issn.1000-128X.2005.02.010Hong Hua-jie, Li Jie, Li Shu-juan. Kinematics si mulation of maglev train based on virtual prototype[J]. Electric Drive for Locomotives, 2005, 46(2): 40-44. (in Chinese) doi: 10.3969/j.issn.1000-128X.2005.02.010 [5] 邓永权. 磁浮列车静悬稳定性和仿真分析[D]. 成都: 西南交通大学, 2004. [6] 邓永权, 罗世辉, 梁红琴, 等. 基于SIMPACK的磁悬浮车辆耦合动力学性能仿真模型[J]. 交通运输工程学报, 2007, 7(1): 12-15. http://transport.chd.edu.cn/article/id/200701003Deng Yong-quan, Luo Shi-hui, Liang Hong-qin, et al. Simulation model of maglev coupling dynamics performance based on SIMPACK[J]. Journal of Traffic and Transportation Engineering, 2007, 7(1): 12-15. (in Chinese) http://transport.chd.edu.cn/article/id/200701003 [7] 缪炳荣, 肖守讷, 罗世辉, 等. 磁浮车辆结构动力学建模与仿真[J]. 中国铁道科学, 2006, 27(1): 104-108.Miao Bing-rong, Xiao Shou-ne, Luo Shi-hui, et al. Modeling and simulation of maglev vehicle structure dynamics[J]. China Rail way Science, 2006, 27(1): 104-108. (in Chinese) [8] 刘堂红, 田红旗. 磁浮列车明线交会横向振动分析[J]. 交通运输工程学报, 2005, 5(1): 39-44. http://transport.chd.edu.cn/article/id/200501010Liu Tang-hong, Tian Hong-qi. Transverse vibration analysis of two maglev trains passing by in open air[J]. Journal of Traffic and Transportation Engineering, 2005, 5(1): 39-44. (in Chinese) http://transport.chd.edu.cn/article/id/200501010 [9] 赵春发, 翟婉明, 王其昌. 低速磁浮车辆曲线通过动态响应仿真分析[J]. 中国铁道科学, 2005, 26(3): 94-98. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200503020.htmZhao Chun-fa, Zhai Wan-ming, Wang Qi-chang. Simulation analysis of the dynamic response of low-speed maglev vehicle curve negotiation[J]. China Railway Science, 2005, 26(3): 94-98. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200503020.htm [10] 赵春发, 翟婉明. 低速磁浮车辆导向方式及其横向动态特性[J]. 中国铁道科学, 2005, 26(6): 28-32. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200506005.htmZhao Chun-fa, Zhai Wan-ming. Guidance mode and dynamic lateral characteristic of low-speed maglev vehicle[J]. China Railway Science, 2005, 26(6): 28-32. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200506005.htm [11] Brezina W, Langerholc J. Lift and side force on rectangular pole pieces in two di mensions[J]. Journal of Applied Physics, 1974, 45(4): 1 869-1 872. -

 下载:
下载:


 点击查看大图
点击查看大图
图(11)
计量
- 文章访问数: 440
- HTML全文浏览量: 151
- PDF下载量: 338
- 被引次数: 0
