

Wheelset climb derailment criteria for evaluation of railway vehicle running safety
-
摘要: 为了掌握车辆爬轨脱轨机理及主要影响因素, 分析了轮对的三维空间受力, 推导了轮轨横向力和垂向力比值的一般表示式, 假设车轮在达到最大轮缘接触角时为脱轨的临界状态, 并认为这时轮轨间出现完全摩擦滑动, 导出了不考虑轮对摇头角的临界脱轨判别的二维准则与考虑轮对摇头角和轮轨蠕滑率效应的三维脱轨判别准则, 给出了轮轴脱轨系数的定义, 采用轮轴脱轨系数和轮重减载率进行脱轨的判别。仿真计算结果表明: 二维脱轨判别准则与三维准则相比偏于保守; 摇头角越小甚至变负, 越有利于防止脱轨, 摇头角越大, 三维准则的临界脱轨曲线越接近于二维准则的; 减小轮轨摩擦系数与增大轮缘角均有利于防止脱轨的发生。Abstract: In order to understand the mechanism and the main factors that cause vehicle climb derailment, the forces exerted on wheelset in 3D space were analyzed, the general ratio formulae of wheel/rail lateral force to vertical force were derived.It was assumed that wheelset reached the critical state of derailment when flange contact occurred, full friction sliding between wheel and rail appeared, 2D evaluation derailment criterion of wheelset without considering wheelset yaw angle was derived, and 3D criterion with taking into account wheelset yaw angle and the effect of wheel/rail creepages was given.The concept of wheelset derailment coefficient was defined, and the combination of wheelset derailment coefficient and wheel load reduction rate was utilized to evaluate derailment.Simulation result shows that 2D criterion is more conservative for derailment evaluation compared with 3D criterion; smaller and negative yaw angles can mitigate derailment possibility, the critical derailment curve of 3D criterion tends to the situation of 2D criterion at larger wheelset yaw angles; the reduction of friction coefficient and the increase of flange angle are advantageous for preventing derailment.
-
0. 引言
列车脱轨将会给人民的生命和财产安全带来重大损失, 因而安全运行的最基本要求是保证列车不发生脱轨事故。随着运行速度的不断提高, 列车运行的安全问题更加突出, 高速重载运行的列车一旦脱轨将会带来更大的灾难。虽然自从1908年法国学者Nadal提出了著名的脱轨系数判别准则以来, 已经有近百年的历史, 广大铁路科研工作者对脱轨问题也进行了长期大量的研究, 但这个问题目前仍然没有得到很好解决, 脱轨事故还是时有发生, 因此, 从机理上掌握轮对的脱轨规律, 提出更加合理的脱轨判别准则是非常必要的。
轮对爬轨脱轨是脱轨的一种重要形式, 主要发生于曲线轨道上, 通常由于大的轮轨横向力或大的轮重减载引起, 其爬轨过程可以认为是准静态的, 即忽略轮对的惯性效应。爬轨脱轨的判别有至今还在广泛采用的著名的Nadal公式, 但其是基于简单的轮轨力平衡关系得出的, 脱轨的判别偏于保守[1], 有很大的局限性; Karmel和Sweet采用详细的脱轨模型和轮对比例模型实验装置进行研究, 给出了车轮准静态爬轨脱轨准则[2-3]; Weinstock对Nadal准则进行了改进, 综合考虑了轮缘贴靠侧和非轮缘贴靠侧的脱轨系数[4]; Elkins和Wu提出了基于车轮横向力与垂向力比值的距离历程的脱轨准则, 考虑了轮对摇头角的影响[5]; 文献[6]采用全比例滚动台进行了单轮对准静态脱轨过程及不同参数影响的试验研究; 文献[7]建立了轮对三维模型, 推导出爬轨的脱轨系数公式, 并通过数值计算验证了与经典公式的一致性。在国内, 曾庆元等首次提出了用能量随机分析方法来判别列车脱轨[8]; 俞展猷等详述了脱轨过程和脱轨过程中轮轨的几何接触状态, 考察了相关参数对脱轨系数限界值的影响, 给出了通用的脱轨安全性评价方法[9]; 翟婉明等基于车辆-轨道耦合动力学理论对列车脱轨进行了研究, 提出直接根据车轮抬升量评判脱轨的原理与方法[10]; 文献[11]在试验台上再现了脱轨现象, 并给出了轮重减载率对脱轨的影响规律; 文献[12]则通过建立非对称车辆/轨道耦合动力学模型, 研究了轨道扣件失效对车辆动态脱轨的影响。
虽然各国学者从理论和试验两方面致力于脱轨系数与轮重减载率的量值研究, 并制定了各自的规范限值, 有关脱轨研究成果对预防列车脱轨发挥了重要作用。但由于此问题的复杂性, 已有脱轨评价标准存在一定局限性, 因此, 非常有必要从脱轨机理和判别准则方面进行更深入研究, 找到脱轨的内在规律, 提出更加合理的轮对爬轨脱轨的判别准则。
1. 轮对受力分析
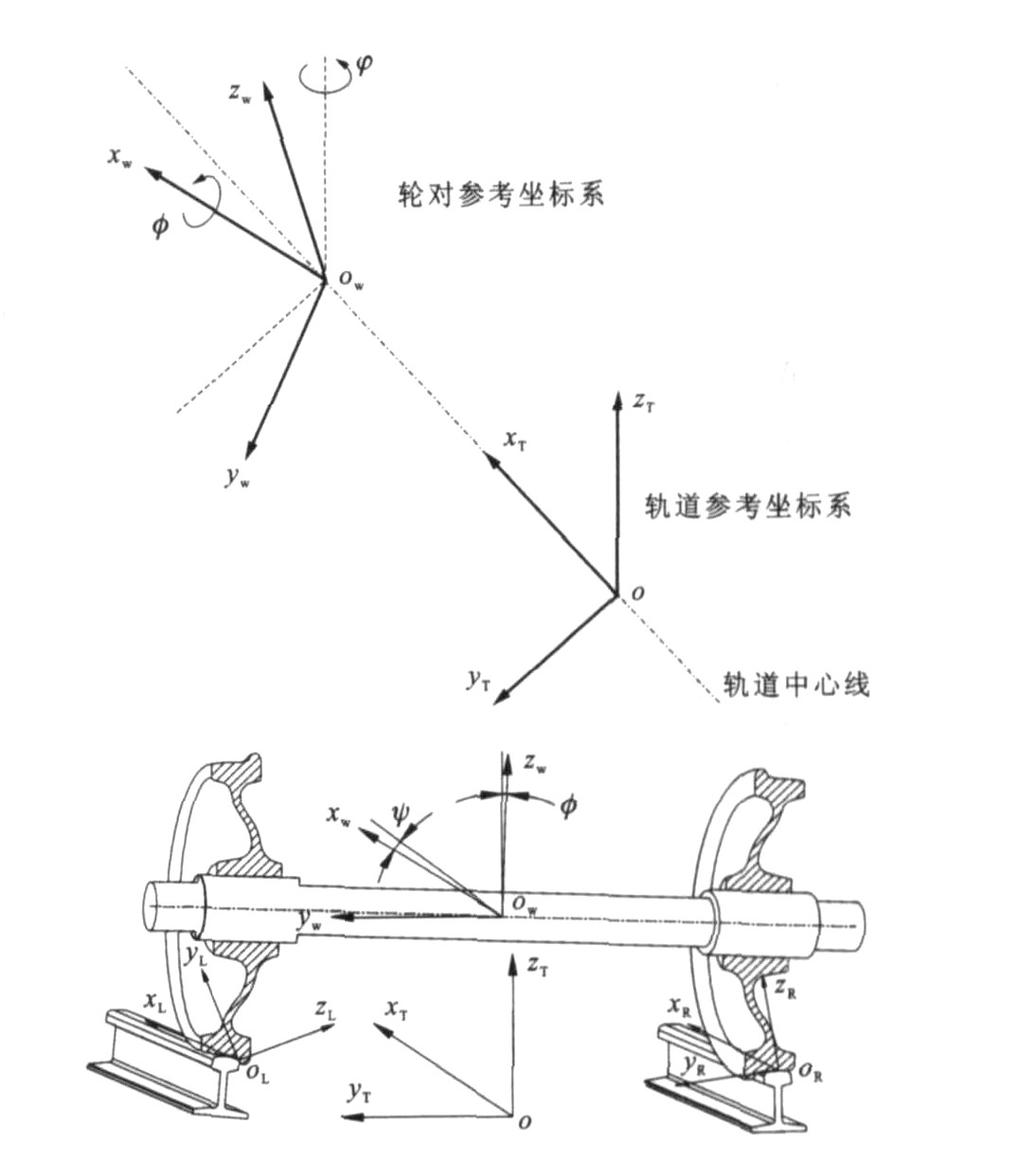
轮对是铁道车辆走行部的最关键部件, 其一方面要承受来自轨道的作用力, 另一方面要承受来自上部车辆的重力和振动, 轮对的受力状态以及和钢轨的作用关系决定着车辆的运行安全, 车辆的脱轨归根结底是轮轨间的相互作用关系发生了变化, 满足不了车轮在轮轨正常接触范围内运行, 因此, 对于脱轨机理的研究应从轮对的受力状态和轮轨相互作用关系的角度来进行。本文假设轮对是刚性的且不跳离钢轨, 轨道和轮对的笛卡儿坐标系见图 1。轨道坐标系oxTyTzT的原点位于轨道中心线并以速度v相对于固定的惯性参考系运动。owxwywzw为固结于轮对质心坐标系, 与轮对一起运动。此外, 还有与轮对一起运动的左右轮轨接触点坐标系oLxLyLzL和oRxRyRzR。
各坐标系之间有如下变换关系
[iΤjΤkΤ]=[cos(ψ)-cos(ϕ)sin(ψ)sin(ϕ)sin(ψ)sin(ψ)cos(ϕ)cos(ψ)-sin(ϕ)cos(ψ)0sin(ϕ)cos(ϕ)][iwjwkw] (1) [iwjwkw]=[1000cos(δL)-sin(δL)0sin(δL)cos(δL)][iLjLkL] (2) [iwjwkw]=[1000cos(δR)sin(δR)0-sin(δR)cos(δR)][iRjRkR] (3)
式中: [iTjTkT]T、[iwjwkw]T、[iLjLkL]T和[iRjRkR]T分别为对应于轨道、轮对和左右轮轨接触点坐标系的单位矩阵; ψ和ϕ为轮对的摇头角和侧滚角; δL、δR分别为左右轮轨接触角。考虑到ψ和ϕ是小量, 于是式(1)变为
[iΤjΤkΤ]=[1-ψ0ψ1-ϕ0ϕ1][iwjwkw] (4)
最后, 可导出左右轮轨接触坐标系和轨道坐标系之间的变换方程为
[iΤjΤkΤ]=[1-ψcos(δL)ψsin(δL)ψcos(δL)-ϕsin(δL)-sin(δL)-ϕcos(δL)0sin(δL)+ϕcos(δL)cos(δL)-ϕsin(δL)][iLjLkL] (5)[iΤjΤkΤ]=[1-ψcos(δR)-ψsin(δR)ψcos(δR)+ϕsin(δR)sin(δR)-ϕcos(δR)0-sin(δR)+ϕcos(δR)cos(δR)+ϕsin(δR)][iRjRkR] (6)
图 2中定义于轨道坐标系中的F1(2)、Q1(2)和P1(2)分别为作用于轮对上的左(右)轮轨接触点处的纵向、横向和垂向力, TxL(R)、TyL(R)和NL(R)定义于轮轨接触坐标系, 为作用于轮对上的左(右)轮轨接触点处的纵向和横向的切向力及法向力, 那么, 两坐标系内的轮轨力间有如下变换关系
[F1-Q1Ρ1]=[1-ψcos(δL)ψsin(δL)ψcos(δL)-ϕsin(δL)-sin(δL)-ϕcos(δL)0sin(δL)+ϕcos(δL)cos(δL)-ϕsin(δL)][ΤxLΤyLΝL] (7)[F2Q2Ρ2]=[1-ψcos(δR)-ψsin(δR)ψcos(δR)+ϕsin(δR)sin(δR)-ϕcos(δR)0-sin(δR)+ϕcos(δR)cos(δR)+ϕsin(δR)][ΤxRΤyRΝR] (8)
由于轮对侧滚角ϕ很小, 如忽略其影响, 则根据式(7)、(8)可导出轮轨横向力和垂向力的比值为
Q1Ρ1=-ΤxLψ-ΤyLcos(δL)+ΝLsin(δL)ΤyLsin(δL)+ΝLcos(δL) (9)Q2Ρ2=ΤxRψ+ΤyRcos(δR)+ΝRsin(δR)-ΤyRsin(δR)+ΝRcos(δR) (10)
2. 轮轨二维接触脱轨准则
如只考虑轮轨二维接触问题, 取ψ为0, 则式(9)、(10)可写成
Q1Ρ1=ΝLtan(δL)-ΤyLΝL+ΤyLtan(δL) (11)Q2Ρ2=ΝRtan(δR)+ΤyRΝR-ΤyRtan(δR) (12)
轮轨间为全滑动时, 左右轮轨横向与切向力为
ΤyL=μLΝLΤyR=μRΝR
式中: μL、μR为左右轮轨间的摩擦系数。于是式(11)、(12)变为
Q1Ρ1=tan(δL)-μL1+μLtan(δL) (13)Q2Ρ2=tan(δR)+μR1-μRtan(δR) (14)
如果左侧车轮的δL达到最大接触角, 即轮缘接触角, 则车轮就到达爬轨的临界点, 有可能爬上钢轨顶面而发生脱轨。式(13)就是著名的Nadal公式, 比值Q1/P1称为车轮脱轨系数。
根据图 2可列出轮对横向力平衡方程为
Η=Q1-Q2 (15)
定义
{Ρ1=(1-ΔΡΡ)ΡΡ2=(1+ΔΡΡ)Ρ (16)
式中: P为左右车轮平均轮轨垂向力, 即车轮重力; ΔP为轮重减载量; ΔP/P为轮重减载率。根据式(13)~(16), 可导出轮对的临界脱轨条件为
ΗΡ+[tan(δL)-μL1+μLtan(δL)+tan(δR)+μR1-μRtan(δR)]ΔΡΡ= tan(δL)-μL1+μLtan(δL)-tan(δR)+μR1-μRtan(δR) (17)
在此定义H/P为轮轴脱轨系数, 式(17)称为轮对爬轨脱轨判别的二维准则。尽管本文采用与文献[13]不同的方法, 但导出的脱轨判别准则是一致的。
如果轮轴横向力H为0, 则从式(17)可得到
ΔΡΡ=[tan(δL)-μL1+μLtan(δL)-tan(δR)+μR1-μRtan(δR)][tan(δL)-μL1+μLtan(δL)+tan(δR)+μR1-μRtan(δR)] (18)
式(18)就是目前中国广泛采用轮重减载率进行脱轨判别的公式, 当轮重减载率超过左边项表示的临界值时, 车轮有可能爬上钢轨而发生脱轨。由于轮重减载率脱轨判别式是在假设轮轴横向力为零的前提下导出的, 而且要求脱轨侧车轮必须轮缘贴靠, 也就是说这时的车轮脱轨系数也同时处于临界值。很显然, 目前单独采用轮重减载率来进行脱轨的判别是不合理的, 除非同时知道这时的轮轴横向力为零, 且车轮处于轮缘贴靠状态。
因此, 采用式(17)比单独采用车轮脱轨系数式(13)或轮重减载率式(18)来进行脱轨的判别更为合理。式(17)的特点是联合采用轮轴脱轨系数和轮重减载率来判断脱轨, 其应用前提是轮轴横向力H≥0和左侧车轮必须贴靠轮缘, 这样车轮才有可能爬上钢轨而脱轨。但是, 该脱轨判别式考虑的是轮轨二维接触问题, 没有考虑轮对摇头角对脱轨的影响, 众所周知, 轮对摇头角对脱轨的影响是非常大的, 因此, 非常有必要对考虑轮轨三维接触关系的脱轨问题进行深入研究。
3. 轮轨三维接触脱轨准则
根据式(9)、(10)、(15)与(16), 可导出轮轨三维接触情况下的轮对临界脱轨条件为
ΗΡ=-ΤxLψ-ΤyLcos(δL)+ΝLsin(δL)ΤyLsin(δL)+ΝLcos(δL)(1-ΔΡΡ)-ΤxRψ+ΤyRcos(δR)+ΝRsin(δR)-ΤyRsin(δR)+ΝRcos(δR)(1+ΔΡΡ) (19)
轮轨纵向和横向切向力与轮轨切向速度或蠕滑率有关, 左右车轮的轮轨纵向和横向蠕滑率为
{ξxL=1-rLr0ξyL=-ψsec(δL) (20) {ξxR=1-rRr0ξyR=-ψsec(δR) (21)
式中: r0、rL和rR分别为车轮滚动圆半径、左轮和右轮的接触半径。与轮轨二维接触情况一样, 同样假设轮对处于脱轨临界状态时轮轨间发生完全滑动, 因此, 根据摩擦定律, 轮轨切向力和法向力关系为
{Τxi=-ξxi√ξ2xi+ξ2yiμiΝiΤyi=-ξyi√ξ2xi+ξ2yiμiΝii=L,R (22)
将式(20)、(21)代入式(22), 然后将式(22)代入式(19), 最后得轮对临界脱轨条件为
ΗΡ+(C1+C2)ΔΡΡ=C1-C2 (23)C1=-μLψrL/r0+sin(δL)√(1-rL/r0)2+ψ2sec2(δL)μLψtan(δL)+cos(δL)√(1-rL/r0)2+ψ2sec2(δL) (24)C2=μRψrR/r0+sin(δR)√(1-rR/r0)2+ψ2sec2(δR)-μRψtan(δR)+cos(δR)√(1-rR/r0)2+ψ2sec2(δR) (25)
式(23)可称为轮对爬轨脱轨判别的三维准则, 实际应用时只需根据轮轨间横向力、垂向力和轮对摇头角进行脱轨的判断。
4. 实例分析
轮对的基本参数见表 1。本文认为轮缘贴靠的左侧轮轨摩擦系数大于踏面接触的右侧轮轨摩擦系数, 即取μL为1.2μR。当对表 1中某一参数对脱轨的影响进行变参数研究时, 其他参数不变化。
表 1 轮对基本参数Table 1. Wheelset basic parametersμL μR δL/(°) δR/(°) rR/m ψ/(°) r0/m rL/m 0.3 0.25 68 1.5 0.456 5 0.2 0.457 5 0.475 那么, 根据表 1的轮对基本参数值以及式(17)和(23), 就可计算出轮对爬轨脱轨判别的二维和三维准则的临界曲线, 见图 3。可知: 大的轮轴脱轨系数和轮重减载率都会增大脱轨的危险性; 二维脱轨判别准则与三维准则相比偏于保守; 负摇头角有利于防止脱轨, 正摇头角增大了脱轨的可能性; 正摇头角越大, 三维准则的临界脱轨曲线越接近于二维准则。
图 4为轮轨摩擦系数μL对脱轨的影响。可知: 无论是二维脱轨准则还是三维脱轨准则, μL越大, 越易脱轨, 而二维脱轨准则的摩擦系数对脱轨的影响要更显著。轮缘角δL对脱轨的影响见图 5, 加大δL有利于防止脱轨。
5. 结语
通过进行轮对的三维空间受力分析, 推导出了轮轨横向力和垂向力比值的一般表示式, 并由此导出了轮对二维和三维脱轨判别准则的表达式, 联合采用轮轴脱轨系数和轮重减载率进行脱轨的判别。实例计算结果表明: 二维脱轨判别准则与三维准则相比偏于保守; 摇头角越小甚至变负越有利于防止脱轨, 摇头角越大, 三维准则的临界脱轨曲线越接近于二维准则; 减小轮轨摩擦系数与增大轮缘角有利于防止脱轨的发生。
-
表 1 轮对基本参数
Table 1. Wheelset basic parameters
μL μR δL/(°) δR/(°) rR/m ψ/(°) r0/m rL/m 0.3 0.25 68 1.5 0.456 5 0.2 0.457 5 0.475  下载: 导出CSV
下载: 导出CSV
-
[1] Nadal M J. Locomotives a vapeur, collection encyclopedie scientifique[J]. Biblioteque de Mecanique Appliquee et Genie, 1908, 186(1): 56-67. [2] Karmel A, Sweet L M. Wheelset mechanics during wheel climb derailment[J]. Journal of Applied Mechanics, 1984, 51(5): 680-686. [3] Sweet L M, Karmel A. Evaluation of time-duration dependent wheel load criteria for wheel climb derailment[J]. Journal of Dynamic Systems, Measurement and Control, 1981, 103(2): 219-227. [4] Weinstock H. Wheel climb derailment criteria for evaluation of rail vehicle safety[C]// ASME Proceeding of the ASME Winter Annual Meeting. New York: ASME, 1984: 1-7. [5] Elkins J, Wu H. Angle of attack and distance-based criteria for flange climb derailment[J]. Vehicle System Dynamics, 2000, 33(2): 293-305. [6] Braghin F, Bruni S, Diana G. Experimental and numerical investigation on the derailment of a railway wheelset with solid axle[J]. Vehicle System Dynamics, 2006, 44(4): 305-325. doi: 10.1080/00423110500337494 [7] Barbosa R S. A 3D contact force safety criterion for flange climb derailment of a railway wheel[J]. Vehicle System Dynamics, 2004, 42(5): 289-300. [8] 曾庆元, 向俊, 娄平. 车桥及车轨时变系统横向振动计算中的根本问题与列车脱轨能量随机分析理论[J]. 中国铁道科学, 2002, 23(1): 1-10. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200201000.htmZeng Qing-yuan, Xiang Jun, Lou Ping, Fundamental problems in calculation of transverse vibration of train-bridge and train-track time-varying system and theory of energy random analysis for train derailment[J]. China Railway Science, 2002, 23(1): 1-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200201000.htm [9] 俞展猷, 李富达, 李谷. 车轮脱轨及其评价[J]. 铁道学报, 1999, 21(3): 33-38. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB903.007.htmYu Zhan-you, Li Fu-da, Li Gu. Wheel derailment and its evaluation[J]. Journal of the China Railway Society, 1999, 21(3): 33-38. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB903.007.htm [10] 翟婉明, 陈果. 根据车轮抬升量评判车辆脱轨的方法与准则[J]. 铁道学报, 2001, 23(2): 17-26. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200102004.htmZhai Wan-ming, Chen Guo. Method and criteria for evaluation of wheel derailment based on wheel vertical rise[J]. Journal of the China Railway Society, 2001, 23(2): 17-26. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200102004.htm [11] 薛弼一. 脱轨机理及试验研究[D]. 成都: 西南交通大学, 2000. [12] 肖新标, 金学松, 温泽锋. 钢轨扣件失效对列车动态脱轨的影响[J]. 交通运输工程学报, 2006, 6(1): 10-15. http://transport.chd.edu.cn/article/id/200601002Xiao Xin-biao, Jin Xue-song, Wen Ze-feng. Influence of rail fastener failure on vehicle dynamic derailment[J]. Journal of Traffic and Transportation Engineering, 2006, 6(1): 10-15. (in Chinese) http://transport.chd.edu.cn/article/id/200601002 [13] 曾京. 轮对稳态脱轨准则的研究[J]. 铁道学报, 1999, 21(6): 15-19. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB199906005.htmZeng Jing. Steady-state derailment criteria of a railway wheelset[J]. Journal of the China Railway Society, 1999, 21(6): 15-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB199906005.htm -


 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 500
- HTML全文浏览量: 164
- PDF下载量: 1086
- 被引次数: 0
