

-
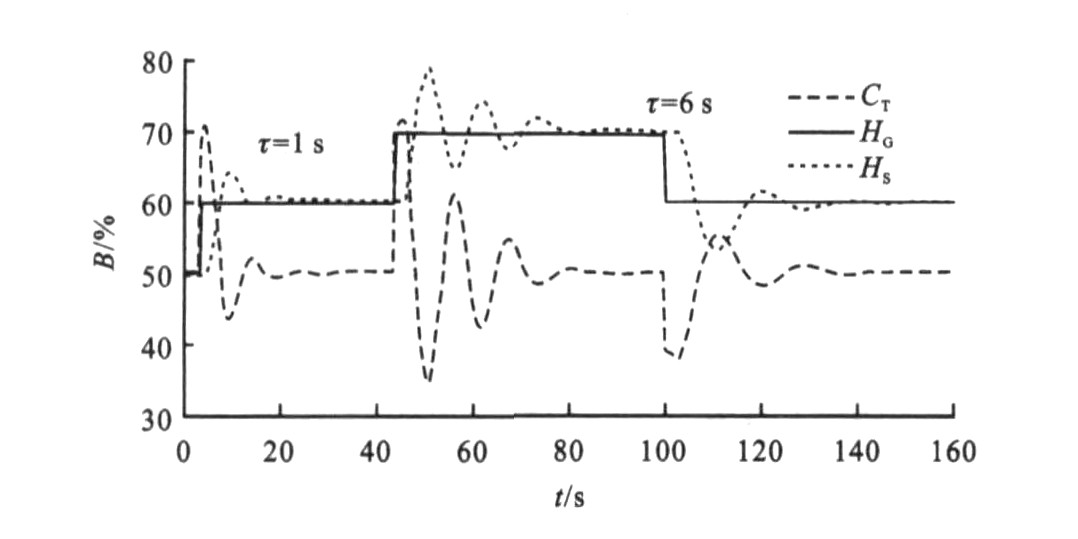
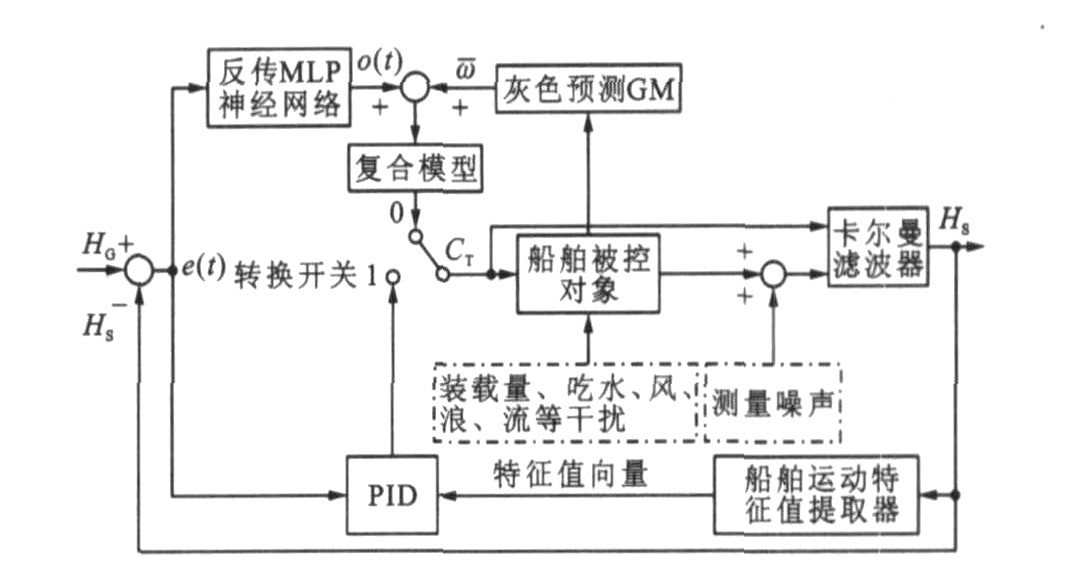
摘要: 为了提高船舶航行控制质量, 建立了船舶航迹复合预测控制模型, 依据灰色预测模型处理船舶运动控制的不确定量, 利用反传多层感知器自适应网络从船舶航行偏差的历史数据中得出控制偏差趋势, 根据灰色预测和神经网络预测的误差大小, 进行组合模型优选及组合权系数优化, 确定航迹最优控制策略。仿真结果表明: 当船舶旋回性指数、船舶追随性指数与滞后时间其中一个大于1时, 任何参数的改变均会引起PID振荡, 而船舶航迹复合预测控制模型能以较少的操舵动作迅速收敛, 从而使船舶航迹与预定航线更加拟合, 因此, 其控制系统的鲁棒性、快速性和稳定性高。Abstract: In order to improve the control quality of ship's track, a hybrid prediction control model was established.The uncertain variables of ship's dynamics were estimated by using grey predicting technique, while back propagation adaptive neural network with multilayer perceptrons was used to analyze the trend of control error development for ship's track based on studying ship's response errors, the optimal combination and optimal weight coefficients of the model were ascertained according to the difference of the above two results, so that the optimum control strategy was found.Simulation result shows that the oscillation of ship PID control system will occurs when one index value of demurrage, turning ability and following ability is more than 1, while the model enables ship's track errors to converge quickly with less rudder movement, so that ship's planning track accords with ship's real track, hereby, the robustness, rapidness and stability of the model are higher.
-

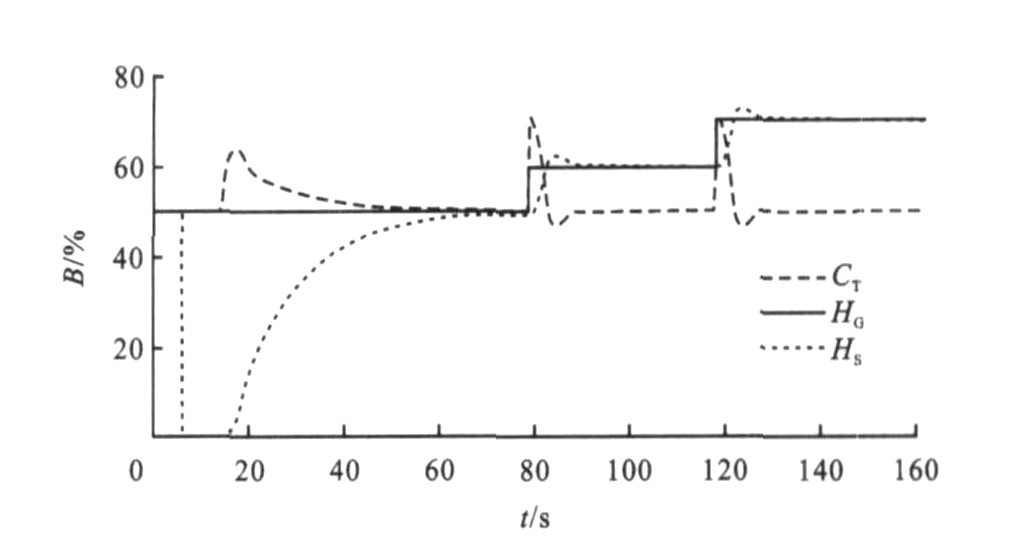
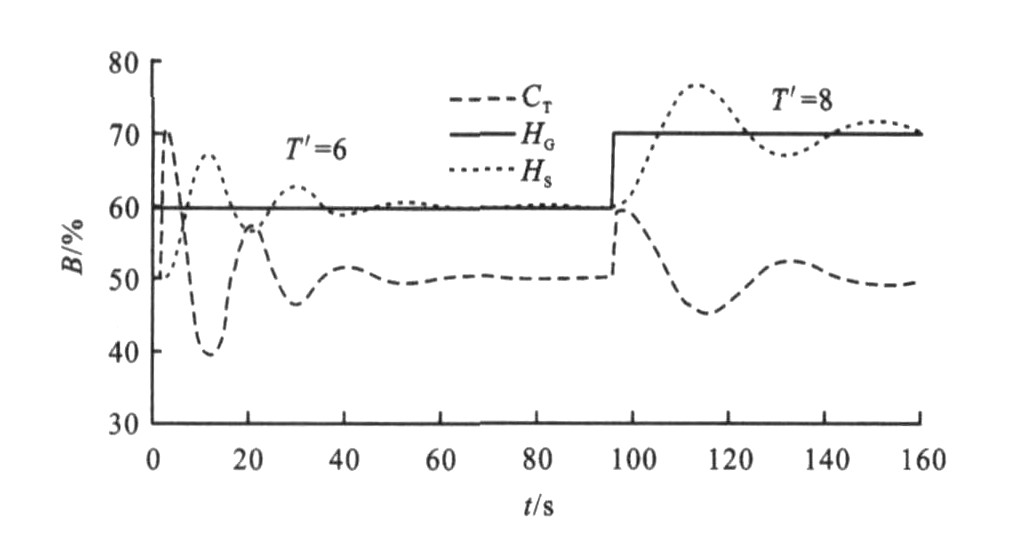
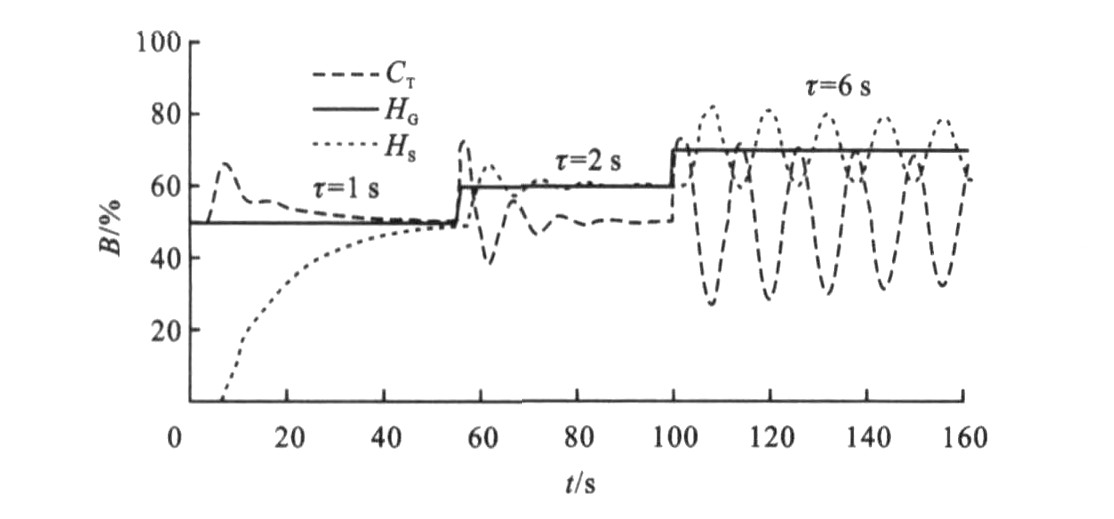
图 3 MLP & GM在K′=1, T′=1, τ=1 s时的仿真结果
Figure 3. Simulation result of MLP & GM when K′=1, T′=1 and τ=1 s

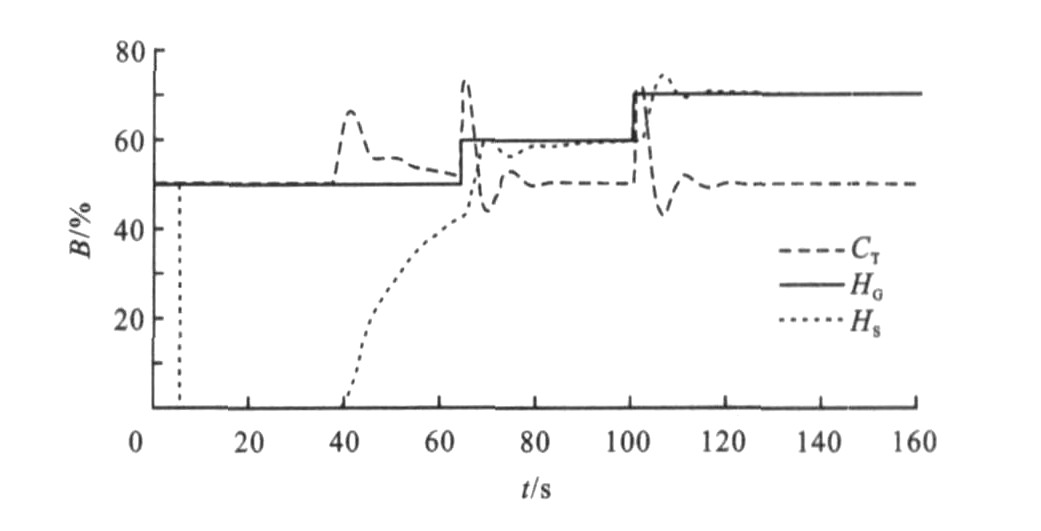
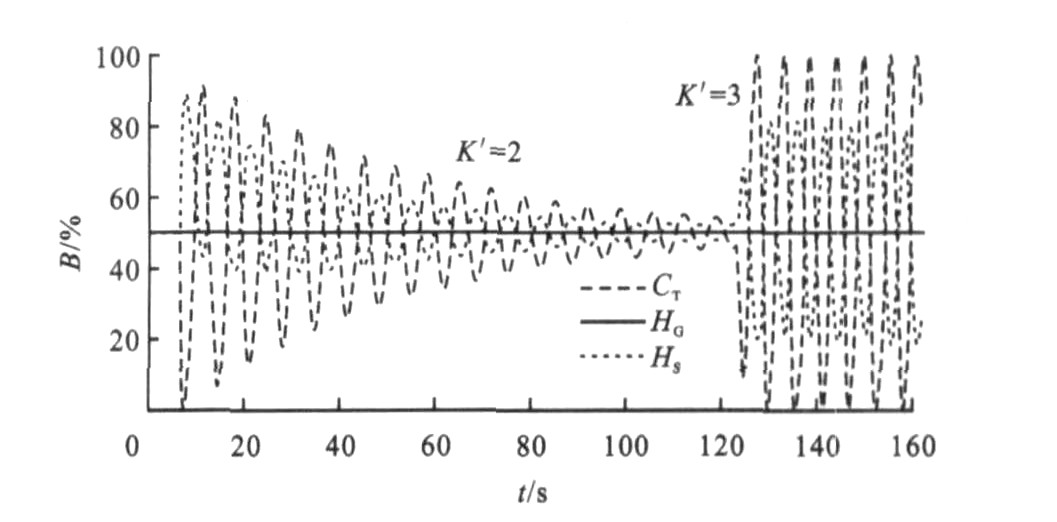
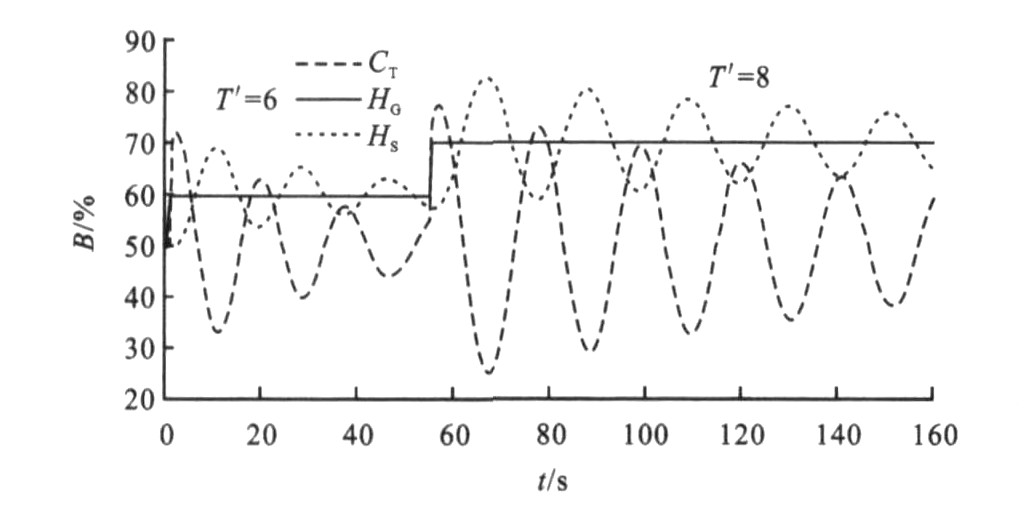
图 4 PID在K′=1, T′=1, τ=1 s时的仿真结果
Figure 4. Simulation result of PID when K′=1, T′=1 and τ=1 s
-
[1] Motora S. On the automatic steering and yawing of ships inrough seas[J]. Journal of Society of Naval Architects, 1953, 12(2): 94-113. [2] Vance V. Model free adaptive control[J]. Control Engineer-ing, 2001, 5(6): 25-29. [3] 卜仁祥, 刘正江, 李铁山. 船舶航迹迭代非线性滑模增量反馈控制算法[J]. 交通运输工程学报, 2006, 6(4): 75-79. http://transport.chd.edu.cn/article/id/200604017Bu Ren-xiang, Liu Zheng-jiang, Li Tie-shan. Increment feed-back control algorithmof shiptrack based on nonlinear slidingmode[J]. Journal of Traffic and Transportation Engineering, 2006, 6(4): 75-79. http://transport.chd.edu.cn/article/id/200604017 [4] Pomerleau D. Efficient training of artificial neural networksfor autonomous navigation[J]. Neural Computation, 1991, 3(1): 88-97. doi: 10.1162/neco.1991.3.1.88 [5] 张松涛, 任光. 基于反馈线性化的船舶航向保持模糊自适应控制[J]. 交通运输工程学报, 2005, 5(4): 72-76. http://transport.chd.edu.cn/article/id/200504015Zhang Song-tao, Ren Guang. Fuzzy adaptive control for shipsteering autopilot based on backstepping technique[J]. Jour-nal of Traffic and Transportation Engineering, 2005, 5(4): 72-76. (in Chinese) http://transport.chd.edu.cn/article/id/200504015 [6] 杨盐生. 船舶运动控制研究[J]. 交通运输工程学报, 2003, 3(2): 34-39. http://transport.chd.edu.cn/article/id/200302006Yang Yan-sheng. Reviewon ship motion control[J]. Journalof Traffic and Transportation Engineering, 2003, 3(2): 34-39. (in Chinese) http://transport.chd.edu.cn/article/id/200302006 [7] Jiang Chuan-wen, Quan Xian-zhang, Zhang Yong-chuan. Grey forecasting model and performance analysis of electricpower load[J]. International Journal Hydroelectric Energy, 2003, 17(4): 105-108. [8] Cybenko G. Approxi mation by superpositions of a sigmoidalfunction[J]. Mathematics of Control, Signals and Systems, 1989, 2(3): 303-314. [9] 张智星, 孙春在, 水谷英二. 神经-模糊和软件计算[M]. 张平安, 高春华, 译. 西安: 西安交通大学出版社, 2000. [10] Highley D D, Hil mes TJ. Load forecasting by ANN[J]. IEEE Computer Applicationin Power, 1993, 6(3): 10-15. -

 下载:
下载:
图(10)
计量
- 文章访问数: 660
- HTML全文浏览量: 257
- PDF下载量: 595
- 被引次数: 0
