

Bayesian minimum hazard control model of traffic accident
Article Text (Baidu Translation)
-
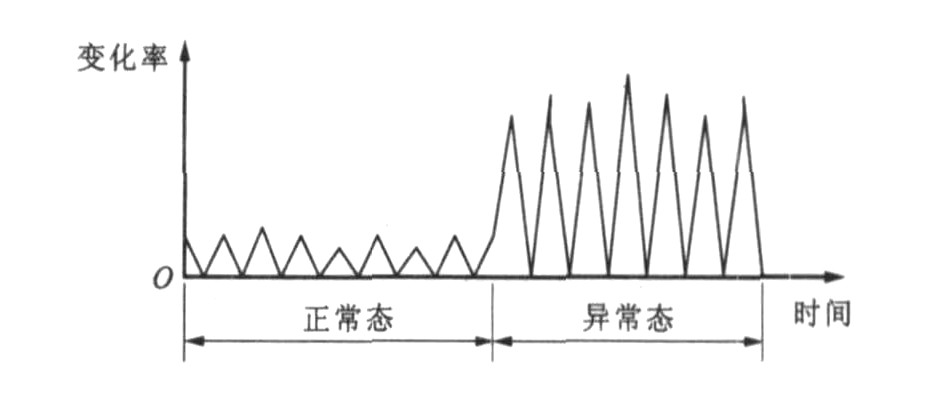
摘要: 为了预测交通事故与控制事故风险, 引进贝叶斯最小风险理论, 构建了交通事故贝叶斯最小风险控制模型。当车辆在不同半径曲线上运行时, 采集其位移坐标数据, 并进行换算处理, 如果速率梯度模的变化率出现不正常的振荡, 则交通事故前兆出现。模拟结果表明: 在车辆正常运行情况下, 速率梯度模对时间的绝对变化率服从三参数的威布尔分布, 利用柯尔莫哥洛夫检验可以判定交通事故前兆出现与否, 从而实现对高速公路交通事故的动态监控。
-
关键词:
- 交通安全 /
- 交通事故 /
- 贝叶斯最小风险控制模型 /
- 威布尔分布 /
- 柯尔莫哥洛夫检验
Abstract: For forecasting traffic accident and control accident hazard, a Bayesian minimum hazard control model of traffic accident was constructed by using Bayesian minimum theory.The displacement coordinates were collected and transformed when vehicle ran on different radii curves, if the variety ratio of speed rate grads modular appeared abnormal surge under normal condition, the auspice of traffic accident appeared.Simulation result shows that the variety ratio to time obeys Weibull distribution with three parameters under normal running condition, the auspice can be determined by using Kolmogorov checking method, so that the dynamic supervision of traffic accident is realized on freeway. -
表 1 样本数据
Table 1. Stylebooks data
离起点的距离/m 距离差/m 车速/ (km·h-1) 车速差/ (m·s-1) gradv 样本排序 2 550.11 22.64 81.52 0.00 0.00 0.039 201 1 2 567.39 23.02 82.87 0.38 0.08 0.039 201 2 2 584.85 23.02 82.87 0.00 0.00 0.000 000 3 2 602.32 23.02 82.87 0.00 0.00 0.131 482 4 2 620.44 24.34 87.64 1.33 0.26 0.046 414 5 2 639.69 25.25 90.91 0.91 0.17 0.000 000 6 2 658.93 24.34 87.64 -0.91 -0.17 0.000 000 7 2 678.17 25.25 90.91 0.91 0.17 0.046 476 8 2 698.08 25.68 92.45 0.43 0.08 0.038 592 9 2 718.21 25.68 92.45 0.00 0.00 0.078 668 10 2 738.78 26.58 95.69 0.90 0.16 0.078 668 11 2 759.81 26.58 95.69 0.00 0.00 0.076 090 12 2 781.28 27.49 98.95 0.91 0.15 0.043 707 13 2 803.02 27.10 97.55 -0.39 -0.06 0.073 590 14 2 825.21 28.40 102.25 1.31 0.21 0.029 542 15 2 847.23 26.74 96.28 -1.66 -0.27 0.056 884 16 2 868.90 27.69 99.69 0.95 0.16 0.025 155 17 2 891.36 28.36 102.09 0.67 0.11 0.021 209 18 2 914.65 29.33 105.57 0.97 0.15 0.019 232 19 2 937.82 28.12 101.22 -1.21 -0.19 0.032 420 20 2 960.77 28.90 104.04 0.78 0.12 0.002 239 21 2 984.54 29.74 107.07 0.84 0.13 0.053 031 22 3 008.79 29.89 107.59 0.14 0.02 0.000 000 23 3 033.05 29.74 107.07 -0.14 -0.02 0.061 679 24 3 057.74 30.74 110.65 0.99 0.14 0.072 384 25 3 082.92 30.74 110.65 0.00 0.00 0.009 882 26 3 108.16 30.87 111.14 0.14 0.02 0.000 000 27 3 133.41 30.74 110.65 -0.14 -0.02 0.009 882 28 3 158.59 30.74 110.65 0.00 0.00 0.078 771 29 3 184.34 31.86 114.70 1.13 0.16 0.069 620 30 3 210.57 31.73 114.22 -0.13 -0.02 0.000 000 31 3 236.81 31.86 114.70 0.13 0.02 0.048 767 32 3 263.55 32.72 117.80 0.86 0.12 0.000 000 33 3 290.29 31.86 114.70 -0.86 -0.12 0.000 000 34 3 317.02 32.72 117.80 0.86 0.12 0.000 000 35 3 343.76 31.86 114.70 -0.86 -0.12 0.000 000 36 3 370.49 32.72 117.80 0.86 0.12 0.000 000 37 3 397.23 31.86 114.70 -0.86 -0.12 0.000 000 38 3 423.97 32.72 117.80 0.86 0.12 0.000 000 39 3 450.70 31.86 114.70 -0.86 -0.12 0.048 767 40 3 476.94 31.73 114.22 -0.13 -0.02 0.060 474 41 3 502.62 30.74 110.65 -0.99 -0.14 0.069 624 42 注: 距离差是车载GPS每间隔1 s车辆行驶过的距离。  下载: 导出CSV
下载: 导出CSV
表 2 计算参数
Table 2. Calculation parameters
样本均值 样本标准差s 偏态参数Cs 形状参数c 尺度参数b 位置参数a 0.033 2 0.032 565 0.741 3 1.847 118 0.065 417 -0.024 914
下载: 导出CSV
表 3 柯尔莫哥洛夫检验
Table 3. Kolmogorov check
平曲线半径/m 分布参数 Dn* Dn (α) 判断 位置参数a 尺度参数b 形状参数c 400 -0.011 964 0.041 002 1.617 559 0.111 0.155 Dn (α) > Dn*接受假设 485 -0.018 064 0.037 538 2.750 956 0.160 0.163 500 -0.026 930 0.053 625 2.734 124 0.145 0.163 650 -0.007 239 0.024 682 1.689 748 0.132 0.249 700 -0.018 005 0.033 276 2.961 857 0.183 0.203 800 -0.019 774 0.040 169 2.880 609 0.105 0.160 1 000 -0.013 501 0.026 015 2.509 773 0.154 0.178 1 200 -0.009 033 0.027 477 2.627 786 0.114 0.188 1 500 -0.010 405 0.022 745 2.058 870 0.168 0.186 1 800 -0.019 471 0.032 662 3.066 037 0.162 0.184 3 000 -0.011 468 0.024 301 2.335 433 0.139 0.227 直线路段 -0.024 914 0.065 417 1.847 118 0.173 0.188
下载: 导出CSV
表 4 决策损失函数
Table 4. Decision-making loss functions
决策 状态 w1 (安全类) w2 (事故类) a1 λ (a1, w1) λ (a1, w2) a2 λ (a2, w1) λ (a2, w2)
下载: 导出CSV
-
[1] Broughton J. Predictive models of road accident fatalities[J]. Traffic Engineering and Control, 1988, 29 (5): 296-300. [2] 周钱, 陆化普, 徐薇. 交通事故规律及其模型[J]. 交通运输工程学报, 2006, 6 (4): 112-115. http://transport.chd.edu.cn/article/id/200604025Zhou Qian, Lu Hua-pu, Xu Wei. Laws and models of trafficaccidents[J]. Journal of Traffic and Transportation Engineer-ing, 2006, 6 (4): 112-115. (in Chinese) http://transport.chd.edu.cn/article/id/200604025 [3] 裴玉龙, 丁建梅. 鉴别道路交通事故多发点的突出因素法[J]. 中国公路学报, 2005, 18 (3): 99-103. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200503021.htmPei Yu-long, Ding Jian-mei. Outstanding factor method toblack spot differentiation[J]. China Journal of Highway andTransport, 2005, 18 (3): 99-103. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200503021.htm [4] 王福建, 李铁强, 俞传正. 道路交通事故灰色Verhulst预测模型[J]. 交通运输工程学报, 2006, 6 (1): 122-126. http://transport.chd.edu.cn/article/id/200601026Wang Fu-jian, Li Tie-qiang, Yu Chuan-zheng. Grey Ver-hulst predictive model of road traffic accident[J]. Journal ofTraffic and Transportation Engineering, 2006, 6 (1): 122-126. (in Chinese) http://transport.chd.edu.cn/article/id/200601026 [5] 王建军, 王军锋, 毕明涛. 区域公路交通事故及高速公路交通事故特征[J]. 长安大学学报: 自然科学版, 2005, 25 (3): 66-69. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200503017.htmWang Jian-jun, Wang Jun-feng, Bi Ming-tao. Characteristicsof traffic accidents on highway and expressway[J]. Journal ofChang an University: Natural Science Edition, 2005, 25 (3): 66-69. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200503017.htm [6] 肖润谋, 运伟国, 徐田兵. 高原长平直线公路汽车行驶安全[J]. 长安大学学报: 自然科学版, 2007, 27 (3): 76-79. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200703016.htmXiao Run-mou, Yun Wei-guo, Xu Tian-bing. Driving safetyon long-even-straight-line road on highland[J]. Journal ofChang an University: Natural Science Edition, 2007, 27 (3): 76-79. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200703016.htm [7] 李彬, 刘安. 交通异常贝叶斯动态检测方法[J]. 中国公路学报, 1999, 12 (3): 68-72. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL199903009.htmLi Bin, Liu An. The method of incident detection with dy-namic Bayes prediction[J]. China Journal of Highway andTransport, 1999, 12 (3): 68-72. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL199903009.htm [8] 吴正. 高速交通中堵塞形成阶段的交通流模型[J]. 交通运输工程学报, 2003, 3 (2): 61-64. http://transport.chd.edu.cn/article/id/200302010Wu Zheng. Traffic flow modelling for jam developing proce-dure on expressway[J]. Journal of Traffic and Transporta-tion Engineering, 2003, 3 (2): 61-64. (in Chinese) http://transport.chd.edu.cn/article/id/200302010 [9] 吴正. 周家嘴路车流起动波速统计研究[J]. 交通运输工程学报, 2002, 2 (1): 67-73. http://transport.chd.edu.cn/article/id/200201015Wu Zheng. Statistics analysis on vehicle flow staring wavespeed of Zhoujiazui road[J]. Journal of Traffic and Transpor-tation Engineering, 2002, 2 (1): 67-73. (in Chinese) http://transport.chd.edu.cn/article/id/200201015 [10] 吴德华. 基于车速参数的交通安全评价模型研究[D]. 上海: 同济大学, 2006. -

 点击查看大图
点击查看大图

图(2) / 表(4)
计量
- 文章访问数: 376
- HTML全文浏览量: 178
- PDF下载量: 430
- 被引次数: 0
