

Self-powered active lateral suspension system of railway vehicle
Article Text (Baidu Translation)
-
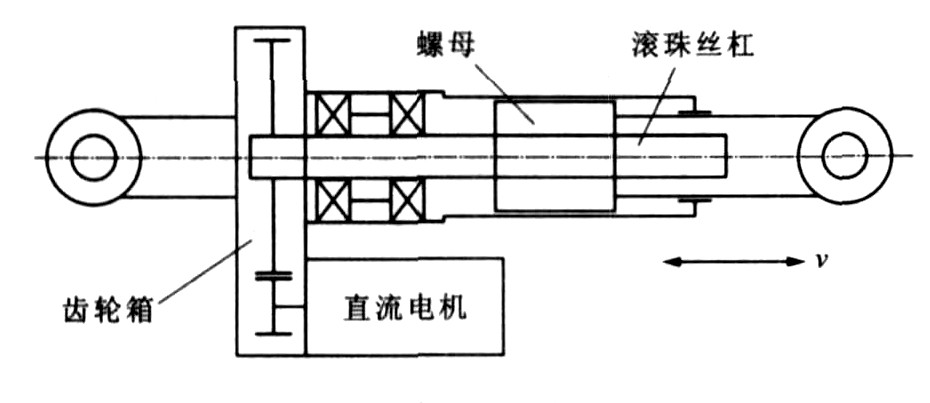
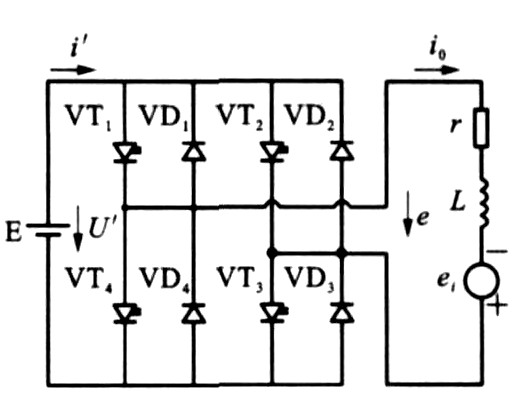
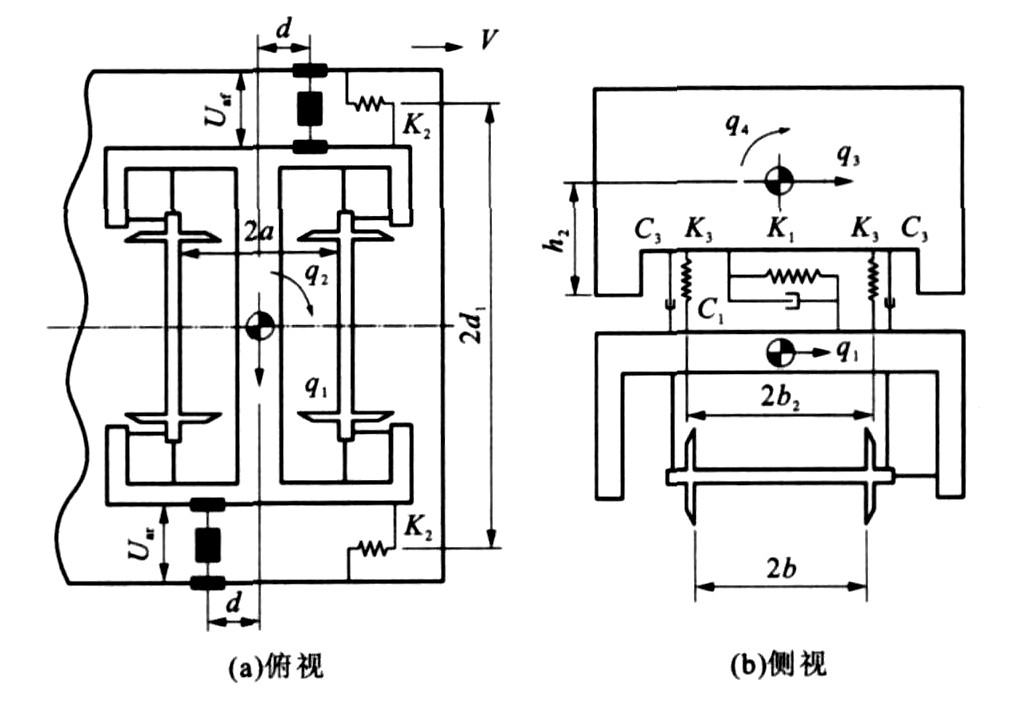
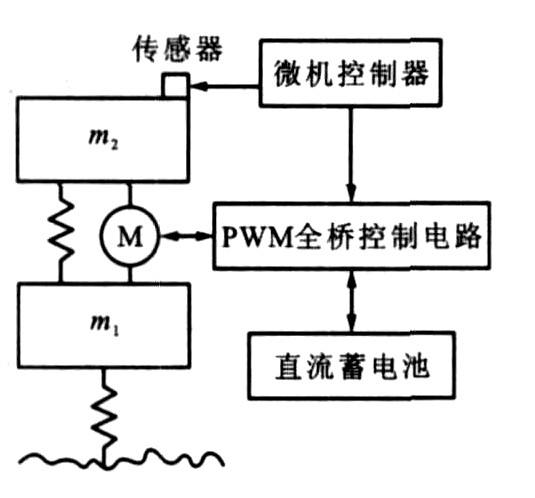
摘要: 为了减少车辆主动悬挂对外部能源的消耗, 设计了自供能量主动悬挂系统, 建立了车辆半车简化横向悬挂动力学模型, 设计了LQG控制器, 并利用随机振动理论分析了系统能量平衡存在的条件, 采用Matlab/Simulink对系统的运行效果进行了仿真。仿真分析结果表明: 自供能量主动悬挂系统比半主动和被动悬挂拥有更好的隔振效果, 且当直流电机作动器的等效阻尼系数大于规定值时, 系统在实现主动减振控制的同时还能够反馈能量。
-
关键词:
- 铁道车辆 /
- 自供能量横向主动悬挂 /
- 等效阻尼系数 /
- 能量平衡
Abstract: In order to decrease the wastage of external energy for active suspension, a self-powered active suspension(SPAS) was designed, a reduced half carbody lateral suspension dynamics model of railway vehicle was established, the LQG controller was designed, the conditions insuring the energy balance of the suspension system were analyzed by using stochastic vibration principle, and its operating performances were simulated by Matlab/Simulink. The result indicates that self-powered active suspension has better isolated performance than semi-active and passive suspensions, and it realizes active vibration control and energy regeneration synchronously when the equivalent damping coefficient of DC motor actuator is greater than its critical value. -
表 1 仿真结果
Table 1. Simulation result
悬挂系统 主动悬挂 半主动悬挂 被动悬挂 车体横移加速度/(m·s-2) 0.056 25 0.097 74 0.149 8 车体侧滚角加速度/(rad·s-2) 0.050 57 0.089 51 0.150 0 前后电机作动器消耗的能量之和/J -11.12  下载: 导出CSV
下载: 导出CSV
-
[1] Sharp R S, Hassan S A. The relative performance capabilities of passive, active and semiactive car suspension systems[J]. Proceedings of the Institution of Mechanical Engineerings, 1986, 200(3): 219-228. doi: 10.1243/PIME_PROC_1986_200_183_02 [2] 朱浩, 刘少军, 邱显焱. 车辆主动悬挂最优预见控制[J]. 交通运输工程学报, 2005, 5(3): 8-12. http://transport.chd.edu.cn/article/id/200503003Zhu Hao, Liu Shao-jun, Qiu Xian-yan. Optimum-preview control model of rail vehicle active suspension[J]. Journal of Traffic and Transportation Engineering, 2005, 5(3): 8-12.(in Chinese) http://transport.chd.edu.cn/article/id/200503003 [3] Wendel G R, Stecklein G L. Aregenerative active suspension system[J]. SAE Paper910659. [4] Nakano K, Suda Y, Nakadai S. Self-powered active vibration control using a single electric actuator[J]. Journal of Sound and Vibration, 2003, 260(2): 213-235. doi: 10.1016/S0022-460X(02)00980-X [5] 林渭勋. 现代电力电子技术[M]. 北京: 机械工业出版社, 2006. [6] Sinha P K, Wormley D N, Hedrick J K. Rail passenger vehicle lateral dynamic performance i mprovement through active control[J]. Journal of Dynamic Systems, Measurements and Control, 1978, 100(12): 270-282. [7] Yoshi mura T, Ananthanarayana N, Deepak D. An activelateral suspensionto a track vehicle systemusing stochastic optimal control[J]. Journal of Sound and Vibration, 1987, 115(3): 473-482. doi: 10.1016/0022-460X(87)90291-4 [8] 张汉全, 肖建, 汪晓宁. 自动控制理论新编教程[M]. 成都: 西南交通大学出版社, 2000. [9] 庄表中. 结构随机振动[M]. 北京: 国防工业出版社, 1995. [10] 姚俊, 马松辉. Si mulink建模与仿真[M]. 西安: 西安电子科技大学出版社, 2002. [11] 李传琦. 电力电子技术计算机仿真实验[M]. 北京: 电子工业出版社, 2006. -

 点击查看大图
点击查看大图
图(4) / 表(1)
计量
- 文章访问数: 479
- HTML全文浏览量: 161
- PDF下载量: 219
- 被引次数: 0
