

Comparison of PSD method and IRI method for road roughness evaluation
-
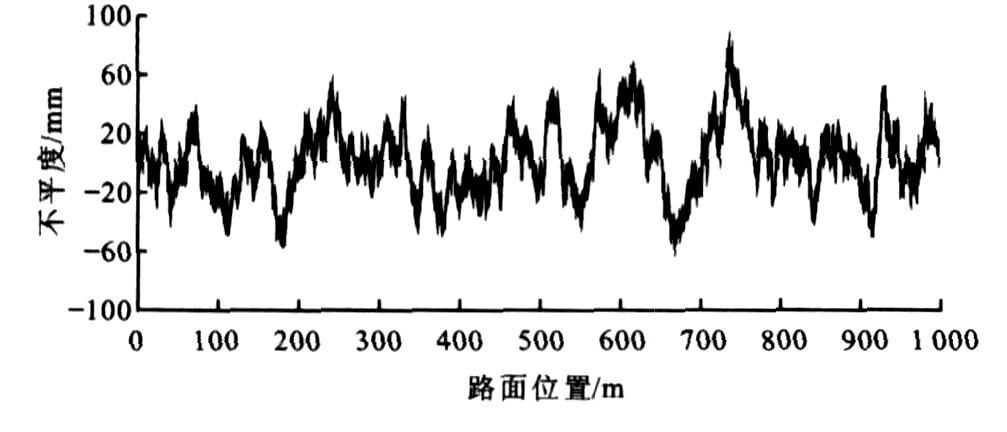
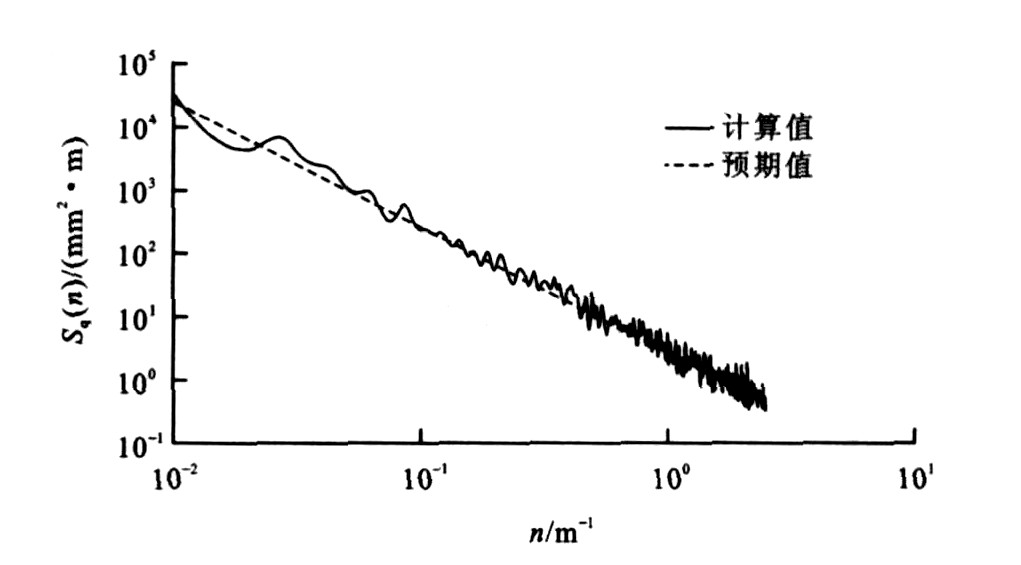
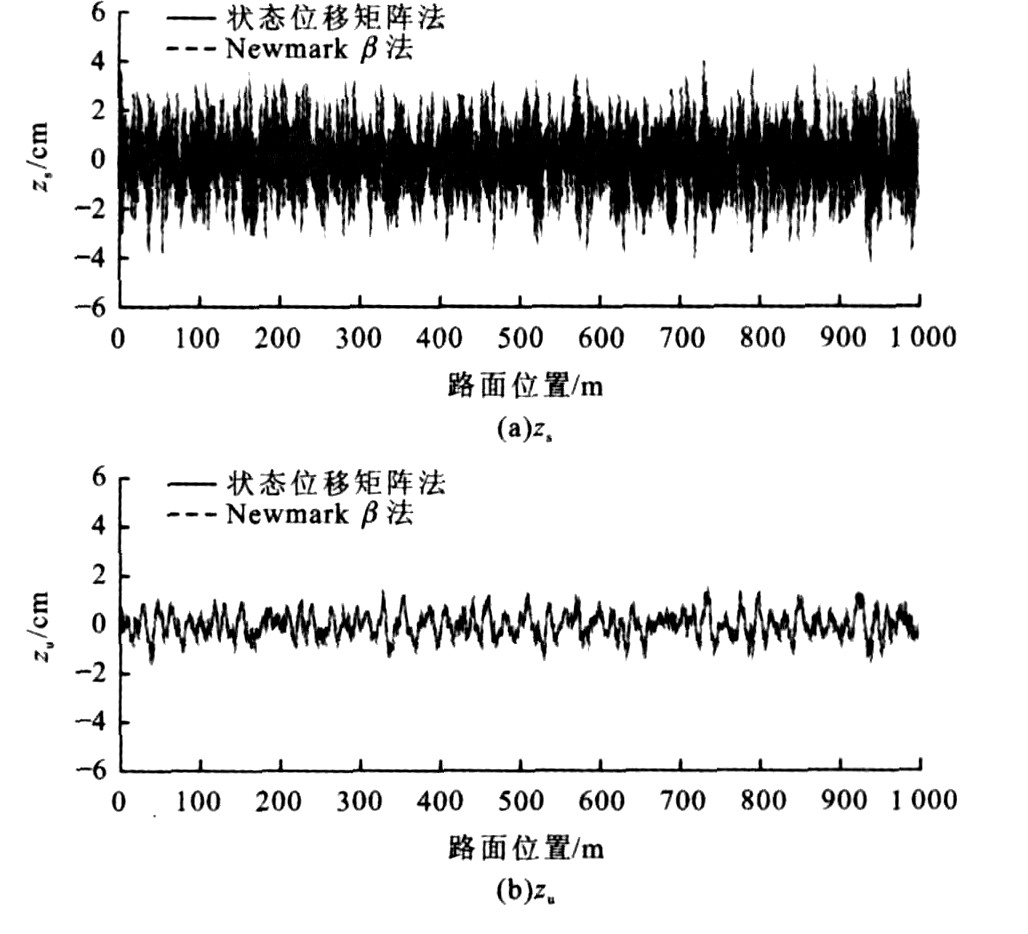
摘要: 为了分析路面平整度功率谱法(PSD) 和国际平整度指数法(IRI) 之间的关系, 采用AR模型模拟满足路面平整度功率谱的路面不平整状态, 采用Newmark β法计算国际平整度指数, 采用最小二乘法得到了PSD法与IRI法之间的关系方程式。研究结果表明: IRI值与路面平度系数的关系为幂函数式, 为了与《公路工程质量检验评定标准》 (JTGF80/1-2004) 所规定的IRI值相对应, 建议在《公路养护技术规范》 (JTJ073-96) 的路面平整度评定等级中增加“极优”项目。Abstract: In order to analyze the relationship between power spectral density (PSD) method and international roughness index (IRI) method in evaluating road roughness, AR model was adopted to simulate road roughness condition for satisfying PSD, and Newmark β method was employed to calculate IRI values, the relationship formula between PSD method and IRI method was determined by using least square method. Analysis result shows that the relationship between IRI value and road roughness coefficient meets power function, and to correspond to IRI values in quality inspection and evaluation standards for highway engineering (JTG F80/1-2004), a "very good" item of road roughness evaluation should be complemented into technical specifications of maintenance for highway (JTJ 073-96).
-

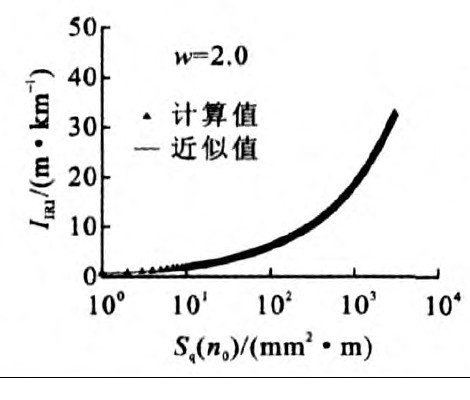
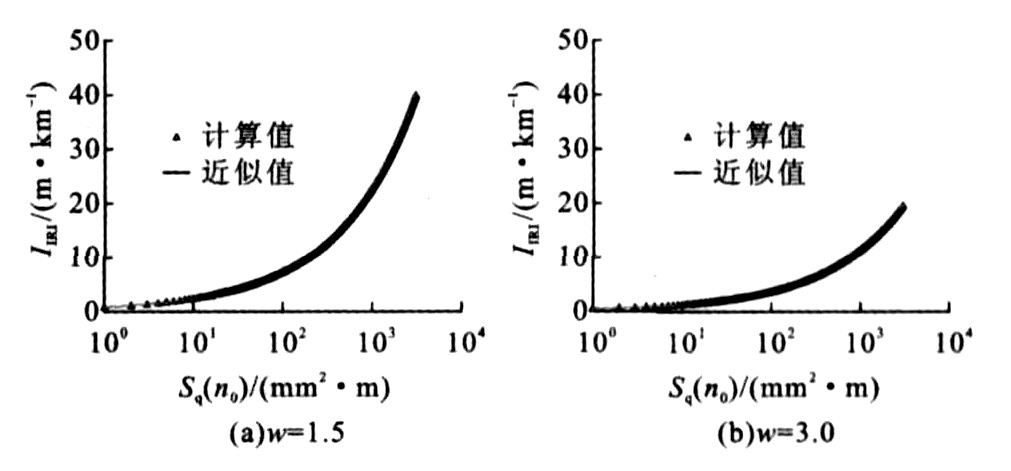
图 5 单一初期值下IIRI与Sq (n0) 关系
Figure 5. Relationship between IIRI and Sq (n0) under one initial datum

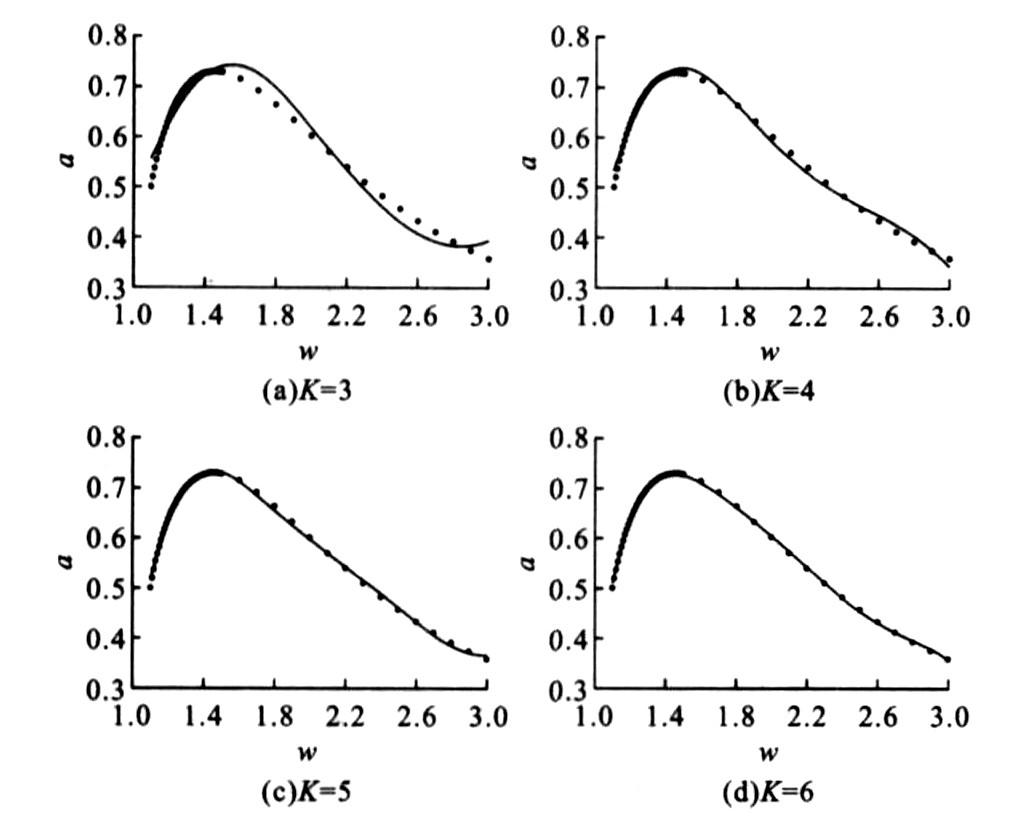
图 6 不同初期值下IIRI与Sq (n0) 关系
Figure 6. Relationship between IIRI and Sq (n0) under different initial data
表 1 路面平整度系数
Table 1. Road roughness coefficients
mm2·m 路面等级 下限 几何平均 上限 A 8 16 32 B 32 64 128 C 128 256 512 D 512 1 024 2 048 E 2 048 4 096 8 192 F 8 192 16 384 32 768 G 32 768 65 536 131 072 H 131 072 262 144 524 288  下载: 导出CSV
下载: 导出CSV
表 2 路面平整度评价RRQI值
Table 2. RRQI values of road roughness evaluation
优 良 中 次 差 ≥8.5 7.0~8.5 5.5~7.0 4.0~5.5 < 4.0
下载: 导出CSV
表 3 回归分析结果
Table 3. Result of regression analysis
K C1 C2 C3 C4 C5 C6 C7 C8 R2/% 1 0.6 -0.051 -0.230 45.28 2 0.6 0.107 -0.389 -0.542 83.42 3 0.6 0.031 -0.691 -0.360 0.599 96.85 4 0.6 -0.015 -0.594 0.089 0.493 -0.534 99.13 5 0.6 -0.004 -0.462 0.012 -0.135 -0.488 0.584 99.74 6 0.6 0.009 -0.495 -0.256 -0.042 0.347 0.554 -0.639 99.93
下载: 导出CSV
表 4 GB/T 7031-1986对应的IIRI值
Table 4. IIRI values according to GB/T 7031-1986
m·km-1 路面等级 下限 几何平均 上限 A 1.70 2.40 3.39 B 3.39 4.80 6.79 C 6.79 9.60 13.58 D 13.58 19.20 27.15
下载: 导出CSV
表 5 JTJ 073-96对应的Sq (n0) 值
Table 5. Sq (n0) values according to JTJ 073-96
路面等级 RRQI IIRI/ (m·km-1) Sq (n0) / (mm2·m) 上限 下限 下限 上限 下限 上限 优 — 8.5 — 4.00 — 44.4 良 8.5 7.0 4.00 6.00 44.4 100.0 中 7.0 5.5 6.00 8.00 100.0 177.8 次 5.5 4.0 8.00 10.00 177.8 277.8 差 4.0 — 10.00 — 277.8 —
下载: 导出CSV
表 6 路面平整度评价建议值
Table 6. Proposed values of road roughness evaluation
路面等级 IIRI/ (m·km-1) Sq (n0) / (mm2·m) 下限 上限 下限 上限 A (极优) — 2.00 — 11.1 B (优) 2.00 4.00 11.1 44.4 C (良) 4.00 6.00 44.4 100.0 D (中) 6.00 8.00 100.0 177.8 E (次) 8.00 10.00 177.8 277.8 F (差) 10.00 — 277.8 —
下载: 导出CSV
-
[1] 王新明, 王秉纲. 高速公路路面功率谱[J]. 交通运输工程学报, 2003, 3 (2): 53-56. http://transport.chd.edu.cn/article/id/200302009Wang Xin-ming, Wang Bing-gang. Expressway pavement power spectral density[J]. Journal of Traffic and Transportation Engineering, 2003, 3 (2): 53-56. (in Chinese) http://transport.chd.edu.cn/article/id/200302009 [2] GB/T7031-1986, 车辆振动输入路面平度表示方法[S]. [3] 马荣贵, 宋宏勋, 来旭光. 激光路面平整度检测系统[J]. 长安大学学报: 自然科学版, 2006, 26 (2): 38-41. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200602009.htmMa Rong-gui, Song Hong-xun, Lai Xu-guang. Pavement roughness measurement system based on laser displacement sensors[J]. Journal of Chang"an University: Natural Science Edition, 2006, 26 (2): 38-41. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200602009.htm [4] Sayers M W, Gillepie T D, Queiroz A V. The international road roughness experiment: establishing correlation and a calibration standard for measurements[R]. Washington DC: World Bank, 1986. [5] JTJ073-96, 公路养护技术规范[S]. [6] 潘玉利. 路面管理系统原理[M]. 北京: 人民交通出版社, 1998. [7] 钟阳, 王哲人, 郭祖辛. 对国际平整度指数法的评价[J]. 中国公路学报, 1994, 7 (1): 28-32.Zhong Yang, Wang Zhe-ren, Guo Zu-xin. The review of international roughness index[J]. China Journal of Highway and Transport, 1994, 7 (1): 28-32. (in Chinese) [8] 李广馥, 崔功凌, 陈页开. 路面平整度测定的IRI标定[J]. 沈阳建筑工程学院学报, 1998, 14 (1): 32-36. https://www.cnki.com.cn/Article/CJFDTOTAL-SYJZ801.007.htmLi Guang-fu, Cui Gong-ling, Chen Ye-kai. Demarcation of pavement roughness by IRI[J]. Journal of Shenyang Architectural and Civil Engineering Institute, 1998, 14 (1): 32-36. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SYJZ801.007.htm [9] 蔚晓丹. 国际平整度指数IRI作为路面平整度评价指标的研究[J]. 公路交通科技, 1999, 16 (S1): 9-13. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK1999S1002.htmWei Xiao-dan. Research on theinternational roughness (IRI) as the pavement roughness index[J]. Journal of Highway and Transportation Research and Development, 1999, 16 (S1): 9-13. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK1999S1002.htm [10] 钟阳, 潘水强. 中国与美国路面不平整状况的对比分析[J]. 广州大学学报: 自然科学版, 2004, 3 (5): 448-451. doi: 10.3969/j.issn.1671-4229.2004.05.015Zhong Yang, Pan Shui-qiang. Comparison of road roughness between China and the United States[J]. Journal of Guangzhou University: Natural Science Edition, 2004, 3 (5): 448-451. (in Chinese) doi: 10.3969/j.issn.1671-4229.2004.05.015 [11] Dodds CJ. The laboratory simulation of vehicle service stress[J]. Journal of Engineering for Industry, ASME, 1974, 96 (2): 391-398. doi: 10.1115/1.3438342 [12] 宋一凡, 陈榕峰. 基于路面不平整度的车辆振动响应分析方法[J]. 交通运输工程学报, 2007, 7 (4): 39-43. doi: 10.3321/j.issn:1671-1637.2007.04.009Song Yi-fan, Chen Rong-feng. Analysis method of vehicle vibration response caused by pavement roughness[J]. Journal of Traffic and Transportation Engineering, 2007, 7 (4): 39-43. (in Chinese) doi: 10.3321/j.issn:1671-1637.2007.04.009 [13] 唐光武, 贺学锋, 颜永福. 路面不平度的数学模型及计算机模拟研究[J]. 中国公路学报, 2000, 13 (1): 114-117. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200001027.htmTang Guang-wu, He Xue-feng, Yan Yong-fu. Mathematical model of road roughness in time domain and its simulation[J]. China Journal of Highway and Transport, 2000, 13 (1): 114-117. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200001027.htm [14] 金睿臣, 宋健. 路面不平度的模拟与汽车非线性随机振动的研究[J]. 清华大学学报: 自然科学版, 1999, 39 (8): 76-79. https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB908.019.htmJin Rui-chen, Song Jian. Simulation of the irregularity and study of nonlinear random vibration of the automobile[J]. Journal of Tsinghua University: Natural Science Edition, 1999, 39 (8): 76-79. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB908.019.htm [15] Iwatani Y. Si mulation of multidi mensional wind fluctuations having any arbitrary power spectra and cross spectra[J]. Journal of Wind Engineering, 1982, 8 (11): 5-18. [16] Hino M. Spectral Analysis[M]. Tokyo: Asakura Book Co., 1977. [17] Hughes TJ R. The Finite Element Method[M]. New York: Dover Publications Inc., 2000. [18] Marquardt D. An algorithm for least-squares estimation of nonlinear parameters[J]. SI AMJournal on Applied Mathematics, 1963, 11 (2): 431-441. [19] Honda H, Kajikawa Y, Kobori T. Spectra of road surface roughness on bridge[J]. ASCE Journal of Structural Division, 1982, 108 (9): 1956-1966. [20] JTG F80/1-2004, 公路工程质量检验评定标准[S]. -


 点击查看大图
点击查看大图

计量
- 文章访问数: 1255
- HTML全文浏览量: 316
- PDF下载量: 880
- 被引次数: 0
