

Relationship between information quantity and visual cognition of traffic guide sign
Article Text (Baidu Translation)
-
摘要: 为了确定指路标志合理路名数, 在室内模拟实验基础上, 运用EMR-HM8眼动仪, 分析了交通指路标志信息量与视认反应时间的定量关系, 对比了目标路名指路标志与非目标路名指路标志视认性。发现指路标志视认的一般规律: 当路名数为2~7个时, 视认反应时间不超过2.50s, 且与指路标志路名数呈显著线性正相关; 目标路名标志视认时间明显小于非目标路名标志的, 平均差值为0.52s。提出了城市道路指路标志视认反应时间的建议取值: 路名数不大于5, 且车速小于50km·h-1时, 可采用2.00s的视认反应时间; 路名数大于5, 或车速不小于50km·h-1, 可采用2.50s的视认反应时间; 指路标志路名数以不超过5个为宜。Abstract: In order to ascertain the rational road name number of traffic guide sign, using EMR-HM8 eye tracker system, the relationship between information quantity and visual cognition of traffic guide sign was analyzed based on many indoor simulation experiments, visual cognition of guide sign with target road name was compared with that with non-target road name. Analysis result shows that when the road name number of guide sign is 2~7, the reaction time of visual cognition is less than 2.50 s and it has significantly linear positive relationship with road name number; the visual cognition time of target road name sign is less than that of non-target road name sign obviously, and their average difference is 0.52 s. The suggested value of visual cognition reaction time is 2.00 s when road name number is less than 5 and the vehicle speed is not bigger than 50 km·h-1; the suggested value is 2.50 s in other condition; the rational road name number of guide sign is less than 5.
-
Key words:
- traffic engineering /
- guide sign /
- information quantity /
- visual cognition /
- reaction time
-

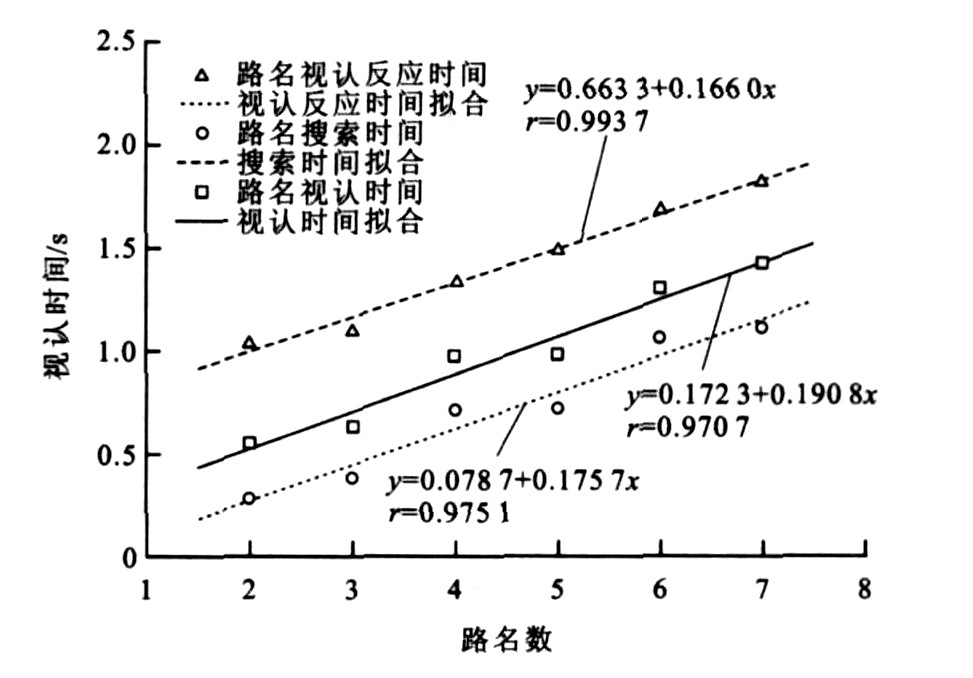
图 3 路名数与视认时间关系
Figure 3. Relations between road name numbers and visual cognition times
表 1 视认顺序权重
Table 1. Weights of visual cognition sequences
路名数 权重(首先视认比率) ni 上方 左方 右方 下方 2 1.07(92.9%) 1.93(7.1%) 28 3 1.50(55.6%) 1.83(33.3%) 2.67(11.1%) 54 4 1.68(72.2%) 2.44(16.7%) 2.44(5.6%) 3.40(5.6%) 36 5 1.21(82.6%) 2.54(25.0%) 2.79(12.5%) 3.46(12.5%) 46 6 1.83(50.0%) 2.50(25.0%) 2.50(16.7%) 3.17(8.3%) 24 7 1.00(80.0%) 2.40(10.0%) 3.00(5.0%) 3.60(5.0%) 16 平均 1.43(71.2%) 2.47(15.1%) 2.68(7.9%) 3.41(5.8%)  下载: 导出CSV
下载: 导出CSV
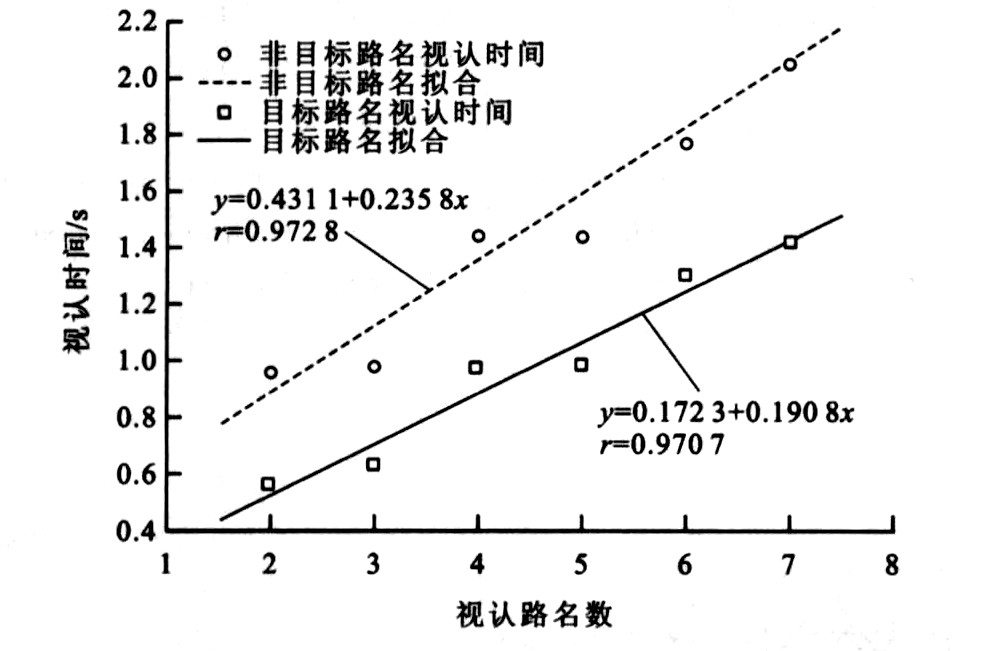
表 2 非目标路名视认时间
Table 2. Visual cognition times of non-target road names
路名数 上方 左方 右方 下方 总视认时间/s 方位路名数 视认时间/s 方位路名数 视认时间/s 方位路名数 视认时间/s 视认时间/s 2 1 0.393 0.562 0.955 3 1 0.239 1 0.323 0.417 0.979 4 1 0.260 1 0.288 1 0.396 0.485 1.429 5 2 0.445 1 0.283 1 0.350 0.357 1.435 6 2 0.604 2 0.592 1 0.258 0.313 1.767 7 2 0.581 2 0.521 2 0.463 0.483 2.048
下载: 导出CSV
表 3 目标路名视认时间
Table 3. Visual cognition times of target road names
路名数 有效样本数 搜索时间/s 停留时间/s 视认时间/s 动作时间/s 视认反应时间/s 2 15 0.286 0.281 0.567 0.469 1.036 3 14 0.383 0.245 0.628 0.472 1.100 4 15 0.715 0.241 0.956 0.382 1.338 5 13 0.720 0.249 0.969 0.517 1.486 6 13 1.060 0.264 1.324 0.358 1.682 7 14 1.109 0.244 1.353 0.466 1.819 合计 平均值 0.712 0.254 0.966 0.444 1.410 P85 1.217(0.933) 0.417(0.433) 1.433(0.933) 0.650(0.674) 1.966(1.667) P95 1.433(1.203) 0.600(0.654) 1.750(1.417) 0.734(0.723) 2.150(1.853) 注: 平均值是取全体样本平均值; P85、P95分别指全体样本各项时间的85%与95%分位; P85、P95各项中括号内为取路名数不大于5样本所得各项时间, 括号外为取路名数不大于7样本所得各项时间。
下载: 导出CSV
-
[1] Al-Madani H, Al-Janahi A R. Assessment of drivers comprehension of traffic signs based on their traffic personal and social characteristics[J]. Transportation Research Part F, 2002, 5(1): 63-76. doi: 10.1016/S1369-8478(02)00006-2 [2] 隽志才, 曹鹏, 吴文静. 基于认知心理学的驾驶员交通标志视认性理论分析[J]. 中国安全科学学报, 2005, 15(8): 8-11. doi: 10.3969/j.issn.1003-3033.2005.08.002Juan Zhi-cai, Cao Peng, Wu Wen-jing. Study on driver traffic signs comprehension based on cognitive psychology[J]. China Safety Science Journal, 2005, 15(8): 8-11. (in Chinese) doi: 10.3969/j.issn.1003-3033.2005.08.002 [3] 郑安民, 牛倬民. 高速公路静态交通标志设置科学性分析[J]. 交通运输工程学报, 2002, 2(4): 49-53. doi: 10.3321/j.issn:1671-1637.2002.04.011Zheng An-min, Niu Zhuo-min. Scientific installation of static traffic signs on expressway[J]. Journal of Traffic and Trans-portation Engineering, 2002, 2(4): 49-53. (in Chinses). doi: 10.3321/j.issn:1671-1637.2002.04.011 [4] 肖润谋, 赵金龙, 陈荫三, 等. 山区公路交通安全标志设计[J]. 长安大学学报: 自然科学版, 2006, 26(3): 63-67. doi: 10.3321/j.issn:1671-8879.2006.03.016Xiao Run-mou, Zhao Jin-long, Chen Yin-san, et al. Design of traffic safety signs on mountain roads[J]. Journal of Chang an University: Natural Science Edition, 2006, 26(3): 63-67. (in Chinese) doi: 10.3321/j.issn:1671-8879.2006.03.016 [5] 初秀民, 严新平, 毛喆, 等. 高速公路场景图像的二值化及交通标志定位检测方法[J]. 中国公路学报, 2006, 19(6): 102-106. doi: 10.3321/j.issn:1001-7372.2006.06.020Chu Xiu-min, Yan Xin-ping, Mao Zhe, et al. Traffic sign positioning detection method and binarization in freeway scene image[J]. China Journal of Highway and Transport, 2006, 19(6): 102-106. (in Chinese) doi: 10.3321/j.issn:1001-7372.2006.06.020 [6] 郭雪斌. 隧道出入口驾驶员瞳孔及视点分布特性实验研究[D]. 上海: 同济大学, 2006. [7] 潘晓东, 林雨, 郭雪斌, 等. 逆光条件下交通标志的可视距离研究[J]. 公路交通科技, 2006, 23(5): 118-120. https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK200605029.htmPan Xiao-dong, Lin Yu, Guo Xue-bin, et al. Research on traffic sign discemible visual range under backlighting condition[J]. Journal of Highway and Transportation Research and Development, 2006, 23(5): 118-120. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GLJK200605029.htm [8] Hel mut TZ, Fathi ma F B. Dayti melegibility as a function of non-fluorescent and fluorescent traffic sign colors[C]//TRB. Transportation Research Record1692. Washington DC: TRB, 2002: 13-17. [9] 周华生. 视力检测反应时间与视力及视力结果关系的探讨[J]. 北京医学, 2006, 28(8): 486-488. doi: 10.3969/j.issn.0253-9713.2006.08.014Zhou Hua-sheng. The relationship between reactive time of vision examination, vision acuity and the result of vision examination[J]. Beijing Medical Journal, 2006, 28(8): 486-488. (in Chinese) doi: 10.3969/j.issn.0253-9713.2006.08.014 [10] 郭应时, 付锐, 袁伟, 等. 通道宽度对驾驶员动态视觉和操作行为的影响[J]. 中国公路学报, 2006, 19(5): 83-87. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200605015.htmGuo Ying-shi, Fu Rui, Yuan Wei, et al. Influences of passage width on driver's dynamic vision and operation behavior[J]. China Journal of Highway and Transport, 2006, 19(5): 83-87. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200605015.htm [11] 郭应时, 付锐, 张建峰, 等. 不同通道宽度条件下汽车驾驶员注视点分布规律[J]. 交通运输工程学报, 2006, 6(2): 51-54. doi: 10.3321/j.issn:1671-1637.2006.02.012Guo Ying-shi, Fu Rui, Zhang Jian-feng, et al. Fixation distribution of driver while driving through passageways with different widths[J]. Journal of Traffic and Transportation Engineering, 2006, 6(2): 51-54. (in Chinese) doi: 10.3321/j.issn:1671-1637.2006.02.012 [12] 杜志刚, 潘晓东, 杨轸, 等. 高速公路隧道进出口视觉震荡与行车安全研究[J]. 中国公路学报, 2007, 20(5): 101-105. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200705019.htmDu Zhi-gang, Pan Xiao-dong, Yang Zhen, et al. Research of visual turbulence and driving safety during freeway tunnel's entrance and exit[J]. China Journal of Highway and Transport, 2007, 20(5): 101-105. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200705019.htm -


 点击查看大图
点击查看大图

图(4) / 表(3)
计量
- 文章访问数: 520
- HTML全文浏览量: 201
- PDF下载量: 913
- 被引次数: 0
