

Virtual simulation test of perception factors for operating speed
Article Text (Baidu Translation)
-
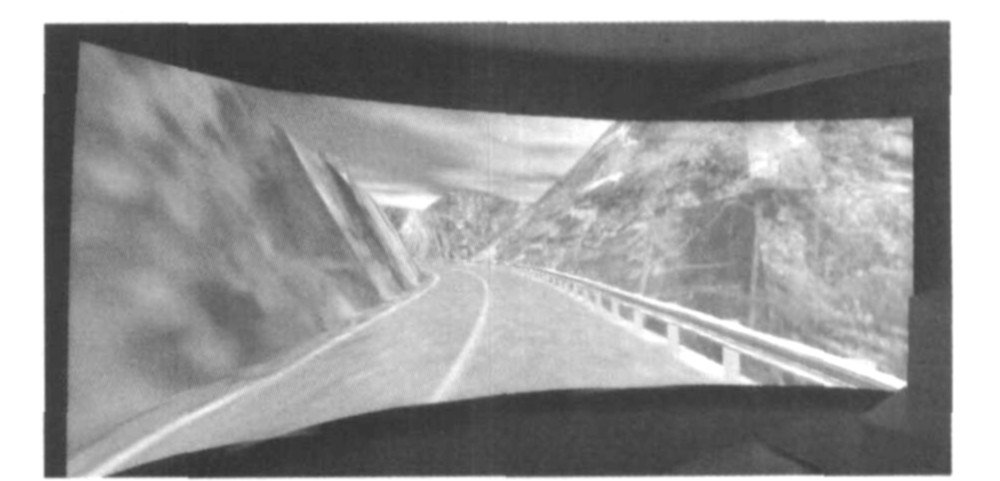
摘要: 为准确预测道路交通安全评价中微观路段的运行车速, 确定了三级公路的驾驶员安全性认知模糊集, 建立了基于Multi Gen Creator软件的15个路段的三维仿真模型, 开发了基于Vega的虚拟仿真系统, 组织了53名驾驶员, 在大型三通道柱面投影仿真系统中, 进行了运行车速认知因子的评价试验。应用模糊统计方法对795组有效认知试验数据进行了分析, 建立了包含道路平曲线半径、纵坡度和行车视距认知因子的三级公路安全性认知评价模型。虚拟仿真试验与道路试验分析结果表明: 平曲线半径、纵坡度和行车视距认知因子评判等级的平均贴近度分别为0.63、0.74和0.70, 因此, 虚拟仿真试验方法可行。Abstract: In order to study the prediction of operating speed on microsection for road safety evaluation, the driver's safety perception factor sets for third-class highway were determined, 3-D simulation model including 15 sections was built by using MultiGen Creator software, and the virtual simulation system was developed by using Vega.The perception evaluation tests with 53 drivers were carried out in three-channel cylinder projection system.Based on the analysis of 795 groups test data, the evaluation model including horizontal curve radius, longitudinal gradient and sight distance for third-class highway was presented by means of fuzzy statistics method.Computation result shows that the mean nearnesses between simulation tests and road tests of the individual evaluation levels on safety perception factors are 0.63, 0.74 and 0.70 respectively.So virtual simulation test is an effective means for the prediction of operating speed.
-
Key words:
- road traffic safety /
- operating speed /
- virtual simulation test /
- third-class highway /
- perception factor /
- nearness
-

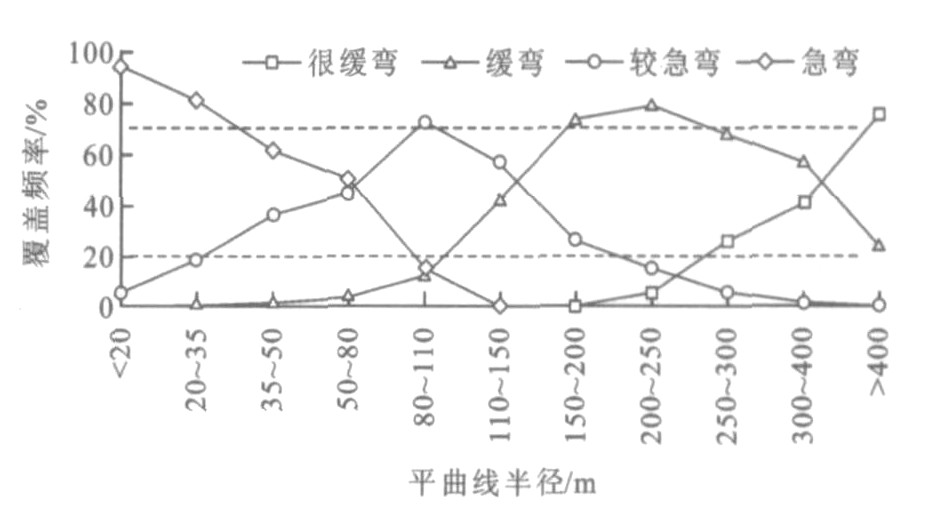
图 4 平曲线半径安全性认知评价曲线
Figure 4. Evaluation curves of safety perception for horizontal curve radius

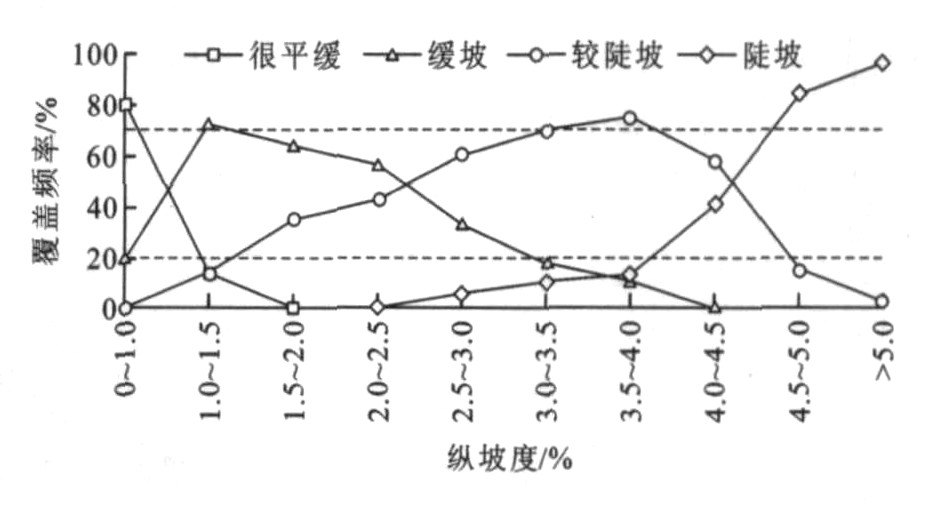
图 5 纵坡度安全性认知评价曲线
Figure 5. Evaluation curves of safety perception for longitudinal gradient
表 2 各评判等级的贴近度
Table 2. Nearnesses of evaluation levels
评价等级 1 2 3 4 平曲线半径 急弯 较急弯 缓弯 很缓弯 贴近度 N1(μsA14, μ14) N1(μsA13, μ13) N1(μsA12, μ12) N1(μsA11, μ11) 贴近度值 0.53 0.53 0.52 0.92 纵坡度 陡坡 较陡坡 缓坡 很缓坡 贴近度 N1(μsA24, μ24) N1(μsA23, μ23) N1(μsA22, μ22) N1(μsA21, μ21) 贴近度值 0.92 0.55 0.62 0.86 视距 很短 短 较长 很长 贴近度 N1(μsA34, μ34) N1(μsA33, μ33) N1(μsA32, μ32) N1(μsA31, μ31) 贴近度值 0.71 0.56 0.67 0.85  下载: 导出CSV
下载: 导出CSV
-
[1] 刘运通. 道路交通安全宏观模糊评价模型[J]. 中国公路学报, 1995, 8(S1): 169-175.Liu Yun-tong. Afuzzy-based model for macroscopic evaluation of road traffic safety[J]. China Journal of Highway and Transport, 1995, 8(S1): 169-175. (in Chinese) [2] Fildes B N, Rumbold G, Leening A. Speed behavior and drivers attitude to speeding[R]. Victoria: Monash University, 1991. [3] Garber NJ, Gadiraju R. Factors affecting speed variance and its influence on accidents[J]. Transportation Research Board, 1989, 1213: 64-71. [4] Fitzpatrick K, Wooldridge MD, Tsimhoni O, et al. Alternative design consistency rating methods for two-lane rural highways[R]. Washington DC: Federal Highway Administration, 2000. [5] 魏朗, 周维新, 李春明, 等. 驾驶员道路认知特性模型[J]. 交通运输工程学报, 2005, 5(4): 116-120.Wei Lang, Zhou Wei-xin, Li Chun-ming, et al. Driver perception model for road structure parameters[J]. Journal of Traffic and Transportation Engineering, 2005, 5(4): 116-120. (in Chinese) [6] 魏朗, 陈涛, 代素珍, 等. 关于一、三级公路安全性认知因素的试验建模研究[J]. 公路交通科技, 2005, 22(2): 116-120.Wei Lang, Chen Tao, Dai Su-zhen, et al. Tests and modeling for the safety perception factor on first-grade and third-grade highway[J]. Journal of Highway and Transportation Research and Development, 2005, 22(2): 116-120. (in Chinese) [7] 杜博英. 车速在道路安全审计中的作用[J]. 公路交通科技, 2004, 21(5): 125-127.Du Bo-ying. The effect of vehicle speed in road safety audit[J]. Journal of Highway and Transportation Research and Development, 2004, 21(5): 125-127. (in Chinese) [8] 钟小明. 平曲线半径及纵坡对高速公路自由流运行速度的影响[D]. 北京: 北京工业大学, 2002. [9] JTG/T B05—2004, 公路项目安全性评价指南[S]. [10] 杨宏志, 许金良. 基于Multi-Agent的公路仿真系统框架[J]. 长安大学学报: 自然科学版, 2005, 25(1): 25-28.Yang Hong-zhi, Xu Jin-liang. Framework of highway simulation system based on multiagent[J]. Journal of Chang'an University: Natural Science Edition, 2005, 25(1): 25-28. (in Chinese) [11] 魏朗, 陈涛, 高丽敏, 等. 汽车驾驶员车速控制模式的模拟研究[J]. 汽车工程, 2005, 27(6): 696-701.Wei Lang, Chen Tao, Gao Li-min, et al. Asimulation study on the vehicle speed control mode of driver[J]. Automotive Engineering, 2005, 27(6): 696-701. (in Chinese) [12] 陈涛. 人-车-路(环境)联合运行虚拟仿真理论与实现技术研究[D]. 西安: 长安大学, 2005. [13] 邬晓光, 郝际平, 芶洁. 旧桥承载力模糊贴近度综合评判法[J]. 长安大学学报: 自然科学版, 2005, 25(3): 45-48.Wu Xiao-guang, Hao Ji-ping, Gou Jie. Load capacity of old bridge with fuzzy nearness comprehensive evaluation method[J]. Journal of Chang'an University: Natural Science Edition, 2005, 25(3): 45-48. (in Chinese) -


 点击查看大图
点击查看大图
图(6) / 表(2)
计量
- 文章访问数: 383
- HTML全文浏览量: 139
- PDF下载量: 432
- 被引次数: 0
