

Simulation of semi-active and active controls for pantograph-catenary vertical vibrations
Article Text (Baidu Translation)
-
摘要: 为了改善高速列车受电弓垂向动力学性能, 建立了受电弓非线性垂向动力学模型、弹性悬挂接触网垂向有限元动力学模型和车辆动力学模型。考虑弓网耦合振动和轨道激扰, 采用受电弓框架顶点或弓头的垂向位移和速度反馈, 将半主动控制减振器或主动控制作动器安装在受电弓基座和框架之间。应用数值仿真方法, 研究了受电弓接触网垂向耦合振动的半主动和主动控制, 并对其控制性能进行了比较。比较结果表明: 与无控制时相比, 在车速为250 km·h-1时, 弓网接触压力方差最小减小值为26.84%, 在车速为300 km·h-1时, 最小减小值为20.88%, 因此, 采用半主动和主动控制能明显减小弓网振动和接触压力的低频波动, 改善了受流质量, 且半主动控制系统结构简单, 易于实现, 在不动作时不会改变受电弓本身的动力学性能。Abstract: In order to improve the vertical dynamics performance of pantograph for high-speed train, the nonlinear vertical dynamics model of pantograph, the vertical finite element dynamics model of catenary and the dynamics model of vehicle were set up.Pantograph-catenary coupled vibration and track irregularity excitation were taken into account, the displacement and velocity of the top point of pantograph frame or pantograph head were taken as feedback control signals, and active control actuator or semi-active control damper was mounted between the base and the frame of pantograph.The numerical simulation method was used to study the semi-active and active controls of pantograph-catenary vertical coupled vibrations, and the control effects were compared.Comparing with passive system, the standard deviation of pantograph-catenary contact force decreases at least 26.84% when train speed is 250 km·h-1, and decreases at least 20.88% when train speed is 300 km·h-1.So pantograph-catenary vibrations and contact force fluctuation at low frequencies are reduced evidently by using semi-active and active controls, current collection quality is improved, semi-active control is simple and easy to realize, and it will not affect the original dynamics performance of pantograph even if the control is disabled.
-
Key words:
- vehicle engineering /
- pantograph /
- catenary /
- semi-active control /
- active control /
- dynamics simulation
-

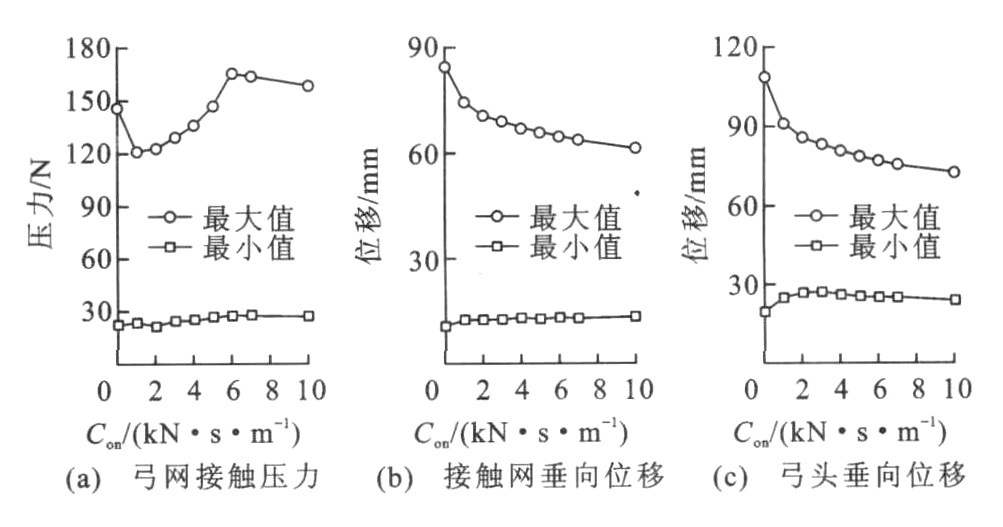
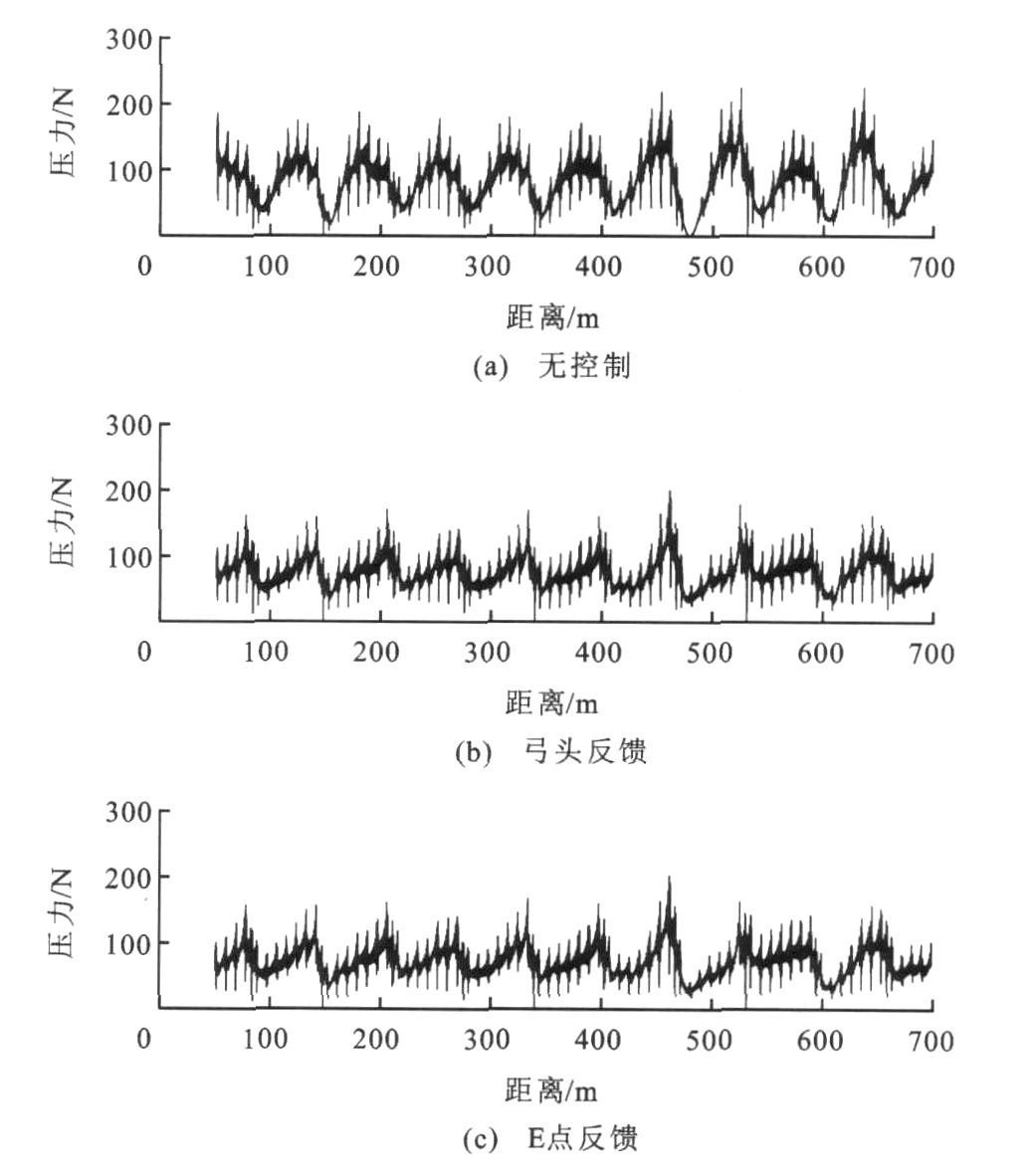
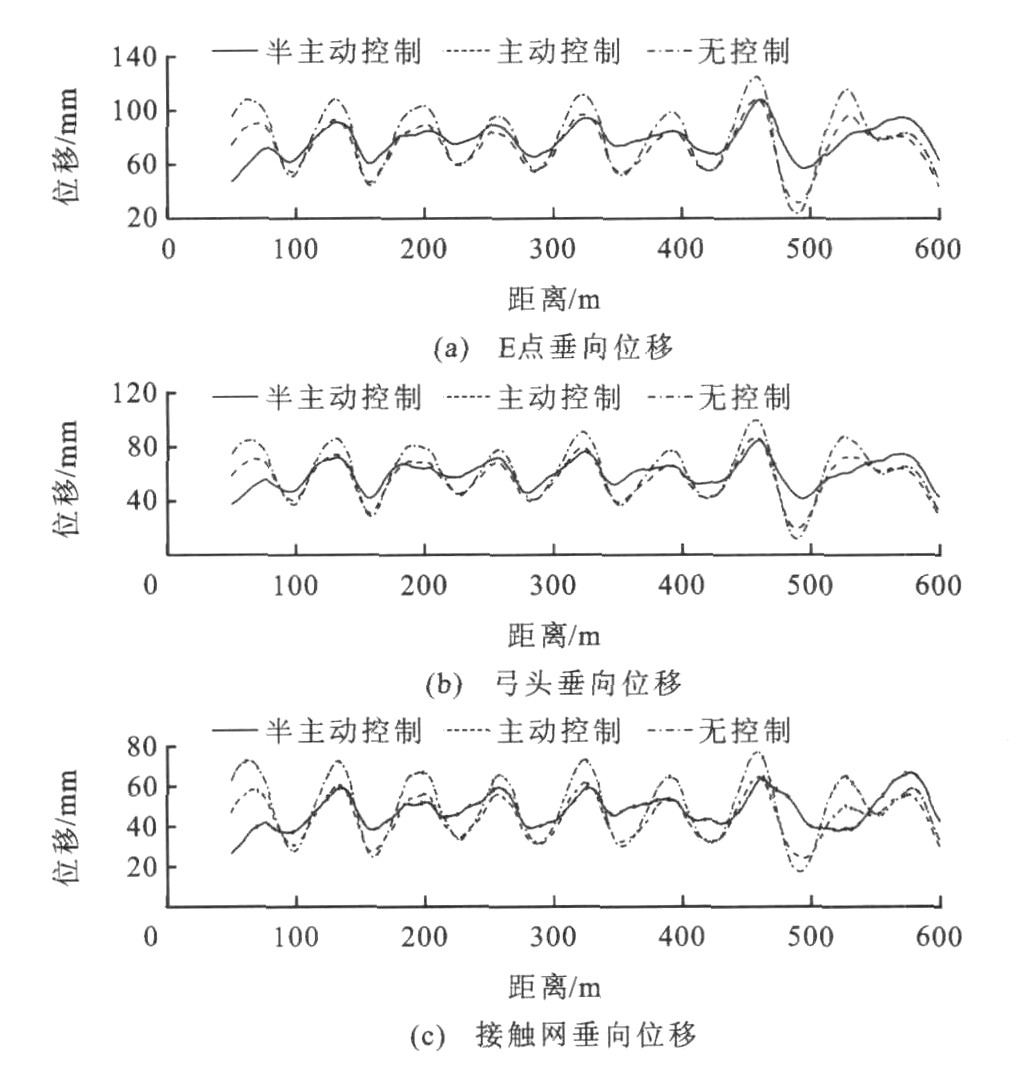
图 3 半主动控制E点反馈Con对弓网振动的影响
Figure 3. Influence of semi-active control with feedback Con at point E on pantograph-catenary vibration

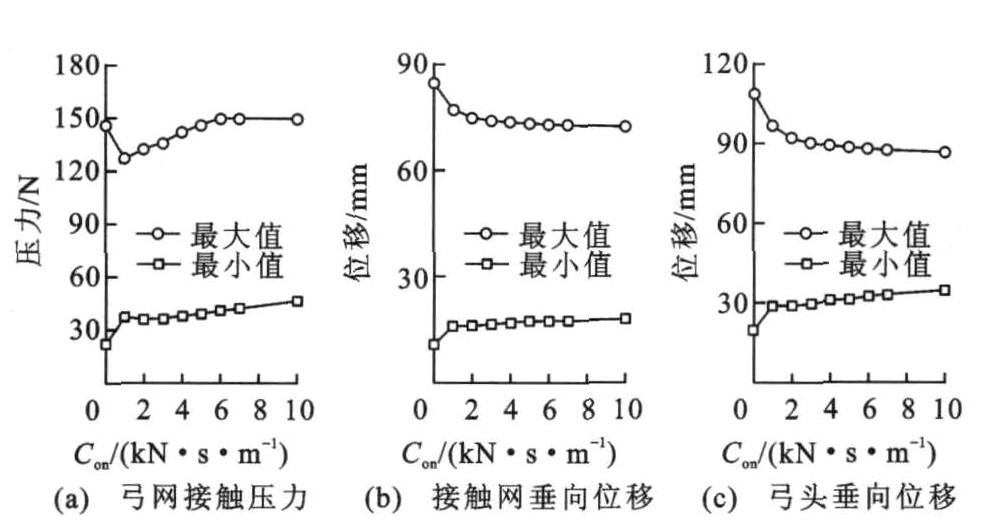
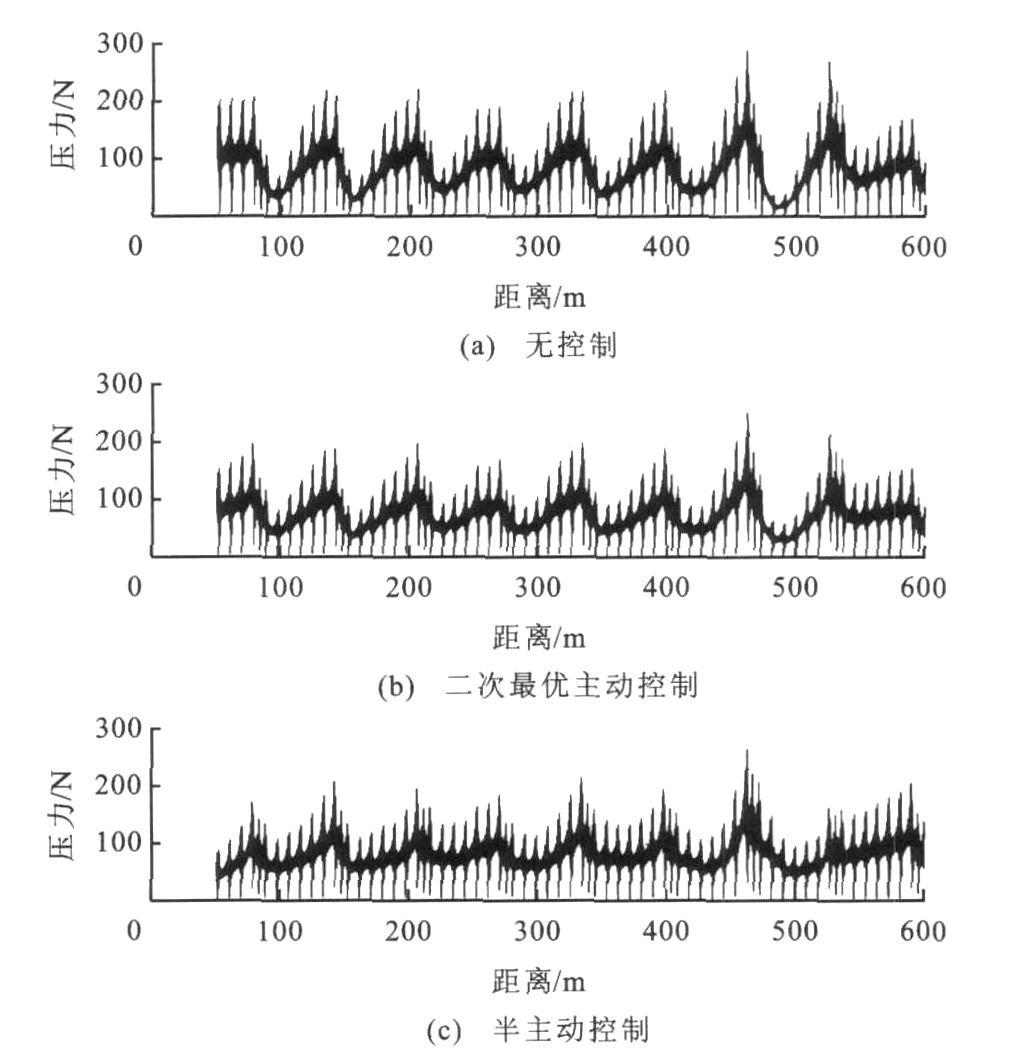
图 4 半主动控制弓头反馈Con对弓网振动的影响
Figure 4. Influence of semi-active control with feedback Con at head point on pantograph-catenary vibration
表 1 接触压力统计值
Table 1. Statistic values of contact forces
车速/(km·h-1) 控制方法 Con/(kN·s·m-1) 平均值/N 最大值/N 最小值/N 方差/N 250 无控制 83.7 224.7 0.0 38.0 半主动, 弓头反馈 2.0 76.1 200.0 2.2 25.5 5.0 72.8 189.3 2.0 24.6 半主动, E点反馈 2.0 73.9 203.5 2.2 26.0 5.0 68.1 192.6 2.0 25.1 主动 75.5 199.4 2.4 27.8 300 无控制 84.6 288.7 0.0 40.7 半主动, E点反馈 2.0 81.6 263.0 1.0 31.7 主动 75.9 249.6 0.6 32.2  下载: 导出CSV
下载: 导出CSV
-
[1] YANG Ming-hui, CHEN Qing. Investigation of semi-active suspension for improving rail way vehicle dynamic performance[C]//LU Bing-heng. Proceedings of the 6th International Conference on Frontiers of Design and Manufacturing. NewJersey: Science Press, 2004: 873-874. [2] 曾京, 戴焕云, 邬平波. 基于开关阻尼控制的铁道客车系统的动力学性能研究[J]. 中国铁道科学, 2004, 25(6): 27-31. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200406005.htmZENG Jing, DAI Huan-yun, WU Ping-bo. Dynamics performance study of rail way passenger car systembased on on/off damping control[J]. China Rail way Science, 2004, 25(6): 27-31. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200406005.htm [3] 郭京波, 杨绍普, 高国生. 高速机车主动控制受电弓研究[J]. 铁道学报, 2004, 26(4): 41-45. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200404009.htmGUOJing-bo, YANG Shao-pu, GAO Guo-sheng. Study onactive control of high-speed-train pantographs[J]. Journal ofthe China Rail way Society, 2004, 26(4): 41-45. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200404009.htm [4] 郭京波, 杨绍普, 高国生. 变刚度弓网系统主动控制研究[J]. 振动与冲击, 2005, 24(2): 9-11. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200502002.htmGUOJing-bo, YANG Shao-pu, GAO Guo-sheng. Researchon active control of the pantograph-catenary system with varying stiffness[J]. Journal of Vibration and Shock, 2005, 24(2): 9-11. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200502002.htm [5] 刘红娇, 张卫华, 梅桂明. 基于状态空间法的受电弓主动控制的研究[J]. 中国铁道科学, 2006, 27(3): 79-83. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200603013.htmLI U Hong-jiao, ZHANG Wei-hua, MEI Gui-ming. Study onpantograph active control based on state space method[J]. China Rail way Science, 2006, 27(3): 79-83. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200603013.htm [6] 罗仁, 曾京. 摆式列车受电弓垂向振动主动控制[J]. 交通运输工程学报, 2006, 6(2): 11-16. http://transport.chd.edu.cn/article/id/200602003LUO Ren, ZENGJing. Active control of pantograph vertical vibration of tilting train[J]. Journal of Traffic and Transportation Engineering, 2006, 6(2): 11-16. (in Chinese) http://transport.chd.edu.cn/article/id/200602003 [7] 梅桂明, 张卫华. 受电弓/接触网系统动力学模型及特性[J]. 交通运输工程学报, 2002, 2(1): 20-25. http://transport.chd.edu.cn/article/id/200201004MEI Gui-ming, ZHANG Wei-hua. Dynamic model andbehavior of pantograph/centary system[J]. Journal of Trafficand Transportation Engineering, 2002, 2(1): 20-25. (in Chinese) http://transport.chd.edu.cn/article/id/200201004 [8] 梅桂明. 受电弓/接触网垂向耦合动力学研究[D]. 成都: 西南交通大学, 2001. [9] ZHANG Wei-hua, MEI Gui-ming, WU Xue-jie, et al. Hybridsimulation of dynamics for the pantograph-catenary system[J]. Vehicle System Dynamics, 2002, 38(6): 393-414. [10] 张卫华, 黄标, 梅桂明. 基于虚拟样机技术的高速弓网系统研究[J]. 铁道学报, 2005, 27(4): 30-35. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200504006.htmZHANG Wei-hua, HUANG Biao, MEI Gui-ming. Study onpantograph-catenary systembased on virtual prototyping[J]. Journal of the China Rail way Society, 2005, 27(4): 30-35. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200504006.htm [11] JENSEN C N, TRUE H. Dynamics of an electrical overheadline system and moving pantograph[J]. Vehicle System Dynamics, 1998, 28(S1): 104-113. [12] COLLI NA A, BRUCI S. Numerical simulation of panto-graph-over head equipment interaction[J]. Vehicle System Dynamics, 2002, 38(4): 261-291. -


 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 439
- HTML全文浏览量: 189
- PDF下载量: 186
- 被引次数: 0
