

Vehicle vibration model based on effective road profiles
Article Text (Baidu Translation)
-
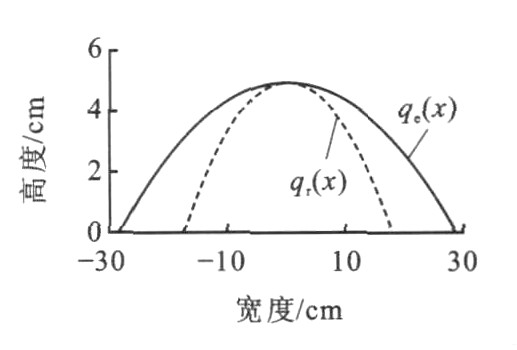
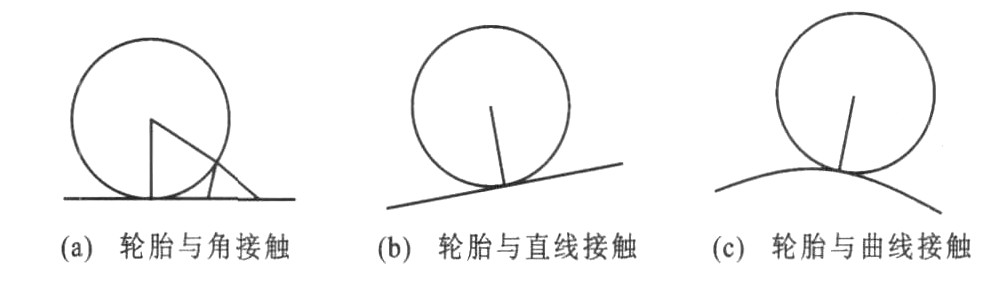
摘要: 为了更加有效地分析车辆与路面突起的接触过程, 将轮胎简化为刚性圆环, 对现有有效路形的定义进行了改进, 将有效路形从原有的轮心轨迹转换为轮胎最低点的轨迹, 推导了有效路形的一般求解方程, 建立了以有效路形作为路面激励输入的2自由度车辆振动模型, 并进行了车辆平顺性仿真及试验验证。分析结果表明: 以有效路形作为路面输入的仿真结果与实车道路试验结果有着良好的一致性, 以有效路形为路面输入时, 车轴加速度平均相对误差为5.17%, 车身加速度平均相对误差为1.71%;以实际路形为路面输入时, 车轴加速度平均相对误差为12.93%, 车身加速度平均相对误差为28.48%。Abstract: In order to effectively analyze the actual contact process of tire with road surface, tire was simplified as a rigid circle, current effective road profile was changed from the center track of wheel to the rock bottom track of wheel, its general equations were set up to solve new effective road profiles, a vehicle vibration model with 2 degrees of freedom was presented, effective road profiles were regarded as road surface input, and the simulation and experiment of vehicle ride comfort were done.Analysis result shows that the simulation result of vibration accelerations for vehicle axle and body approaches to road experimental data.Under effective road profiles input, the average relative error of vehicle axle acceleration is 5.17%, and the average relative error of body acceleration is 1.71%.Under real road profile input, the average relative error of axle acceleration is 12.93%, and the average relative error of body acceleration is 28.48%.
-
表 1 仿真结果与试验结果对比
Table 1. Comparison of simulation and test results
车速/ (km·h-1) 20 30 40 50 60 70 80 平均误差/% 车轴加速度/ (m·s-2) 实车试验 130.23 174.38 172.05 154.16 136.34 128.27 118.10 0.00 有效路形 108.43 168.36 177.88 156.04 135.69 119.27 113.47 5.17 实际路形 160.75 173.68 142.06 118.10 115.21 118.83 121.61 12.93 车身加速度/ (m·s-2) 实车试验 34.52 37.74 35.06 30.08 26.20 23.04 22.11 0.00 有效路形 34.35 38.38 34.72 30.29 26.45 23.32 20.79 1.71 实际路形 37.49 30.66 24.63 20.34 17.25 14.94 13.15 28.48  下载: 导出CSV
下载: 导出CSV
-
[1] 庄继德. 汽车轮胎学[M]. 北京: 北京理工大学出版社, 1996. [2] 谢水友, 郑传超. 轮胎接触压力对沥青路面结构的影响[J]. 长安大学学报: 自然科学版, 2004, 24 (1): 12-16. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200401004.htmXIE Shui-you, ZHENG Chuan-chao. Effects of tire contactpressure on asphalt pavement structure[J]. Journal ofChang an University: Natural Science Edition, 2004, 24 (1): 12-16. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200401004.htm [3] 瞿宏敏, 程军. 汽车动力学模拟中的轮胎模型述评[J]. 汽车技术, 1996, 27 (7): 1-8. https://www.cnki.com.cn/Article/CJFDTOTAL-QCJS199607000.htmQU Hong-min, CHENG Jun. Howto select tire models forsimulating automotive dynamics[J]. Automobile Technology, 1996, 27 (7): 1-8. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCJS199607000.htm [4] 郭应时, 魏朗. 汽车轮胎理论模型的分析[J]. 西安公路交通大学学报, 1998, 18 (2): 65-68. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL802.016.htmGUO Ying-shi, WEI Lang. Analysis of theoretic model ofpneumatic tyres[J]. Journal of Xi'an Highway University, 1998, 18 (2): 65-68. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL802.016.htm [5] 管迪华, 范成建. 用于不平路面车辆动力学仿真的轮胎模型综述[J]. 汽车工程, 2004, 26 (2): 162-167. doi: 10.3321/j.issn:1000-680X.2004.02.012GUAN Di-hua, FAN Cheng-jian. Areview of tire models for vehicle dynamics simulation on uneven road[J]. Automotive Engineering, 2004, 26 (2): 162-167. (in Chinese) doi: 10.3321/j.issn:1000-680X.2004.02.012 [6] 葛剑敏, 刘春辉, 郑联珠. 软(硬) 路面行驶车辆轮胎模型分析[J]. 轮胎工业, 2001, 21 (2): 73-80. doi: 10.3969/j.issn.1006-8171.2001.02.002GE Jian-min, LI U Chun-hui, ZHENG Lian-zhu. Analysis of vehicle tire on soft (or hard) road[J]. Tire Industry, 2001, 21 (2): 73-80. (in Chinese) doi: 10.3969/j.issn.1006-8171.2001.02.002 [7] 王裕鹏, 赵龙庆. 典型轮胎模型及其发展趋势[J]. 农业装备与车辆工程, 2006, 16 (12): 3-5. doi: 10.3969/j.issn.1673-3142.2006.12.001WANG Yu-peng, ZHAO Long-qing. Typical tire models andits trend of development[J]. Agricultural Equipment and Vehicle Engineering, 2006, 16 (12): 3-5. (in Chinese) doi: 10.3969/j.issn.1673-3142.2006.12.001 [8] 管欣, 董波. 结合轮胎包容特性的主动悬架模型[J]. 汽车工程, 2003, 25 (4): 356-359. doi: 10.3321/j.issn:1000-680X.2003.04.011GUAN Xin, DONG Bo. An active suspension system with enveloping tire model[J]. Automotive Engineering, 2003, 25 (4): 356-359. (in Chinese) doi: 10.3321/j.issn:1000-680X.2003.04.011 [9] CAPTAI N K M, BOGHANI A B, WORMLEY D N. Ana-lytical tire models for dynamic vehicle simulation[J]. Vehicle System Dynamics, 1979, 8 (1): 1-32. [10] I MI NE H, DELANNE Y, M SIRDI N K. Road profile in putestimation in vehicle dynamics simulation[J]. Vehicle System Dynamics, 2006, 44 (4): 285-303. [11] 郭孔辉, 刘青, 丁国峰. 载荷和胎压对轮胎包容特性的影响[J]. 农业工程学报, 1998, 14 (3): 53-55. https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU803.009.htmGUO Kong-hui, LIU Qing, DING Guo-feng. Influences of loading and inflation pressure on tire enveloping properties[J]. Transactions of the Chinese Society of Agriculture Engineering, 1998, 14 (3): 53-55. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU803.009.htm [12] 安宏伟, 管迪华, 范成建. 轮胎静包容特性的试验研究[J]. 汽车工程, 2004, 26 (1): 57-60. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200401015.htmAN Hong-wei, GUAN Di-hua, FAN Cheng-jian. An experimental study on tire static enveloping properties[J]. Auto-motive Engineering, 2004, 26 (1): 57-60. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200401015.htm [13] 郭孔辉, 刘青, 丁国峰. 轮胎包容特性分析及其在汽车振动系统建模中的应用[J]. 汽车工程, 1999, 21 (2): 65-71. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC199902000.htmGUO Kong-hui, LIU Qing, DING Guo-feng. Analysis of tire enveloping properties and its application in modeling of vehicle vibration systems[J]. Automotive Engineering, 1999, 21 (2): 65-71. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC199902000.htm -




 点击查看大图
点击查看大图
图(5) / 表(1)
计量
- 文章访问数: 400
- HTML全文浏览量: 139
- PDF下载量: 241
- 被引次数: 0
