

Feedback controller design and algorithm of freeway system
Article Text (Baidu Translation)
-
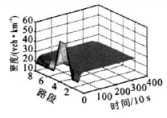
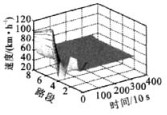
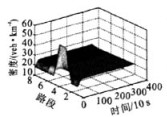
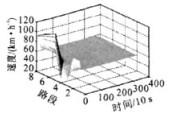
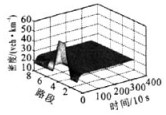
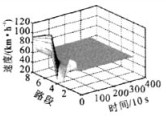
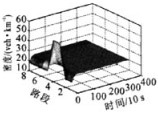
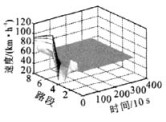
摘要: 为了提高快速路系统的利用效率, 设计了一个反馈控制器, 提出了反馈控制器的迭代求解算法, 控制器能实时跟踪车辆的密度, 并与所期望的密度进行比较, 把误差反馈给车辆, 通过给车辆发布恰当的速度命令来控制车辆运行, 使实际车辆密度收敛于期望密度。仿真计算结果表明: 算法取4次迭代时的车辆密度与运行速度最大相对误差为0.32%, 平均耗时为0.32 s, 因此, 设计的控制器使交通流运行趋于平稳, 减少了车辆延误, 从而提高了系统利用效率。Abstract: In order to improve the using efficiency of freeway system, a feedback controller was designed and its iterative algorithm was proposed, the controller could track vehicles' real-time densities and compare them with the anticipant density, then it sent the errors to the vehicles, and guaranteed the convergence of the real vehicle density to the anticipant density under appropriate speed command followed by vehicles.Simulation result indicates that the maximum relative error of vehicles' densities and travel speeds is 0.32%, and the average time consumption is 0.32 s after the fourth iteration of the algorithm, so the controller guarantees the smooth and stable traffic flow, reduces the vehicle's delay and increases the efficiency of the system.
-
表 1 初始速度和密度
Table 1. Initial speeds and densities
路段 1 2 3 4 5 6 7 8 速度/(km·h-1) 81 81 29 29 81 81 81 81 密度/(veh·km-1) 18 18 52 52 18 18 18 18  下载: 导出CSV
下载: 导出CSV
表 2 模型参数
Table 2. Model parameters
α l m τ κ υ T vf ρjam cξ cζ ρdi 0.95 1.86 4.05 20 40 60 10 110 110 0.85 0.85 25
下载: 导出CSV
-
[1] PAPAGEORGIOU M, KOTSI ALOS A. Freeway ramp metering: an overview[J]. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(4): 271-281. doi: 10.1109/TITS.2002.806803 [2] KOTSI ALOS A, PAPAGEORGIOU M, MANGEAS M, et al. Coordinated and integrated control of motorway net-works via non-linear optimal control[J]. Transportation Research Part C, 2002, 10: 65-84. doi: 10.1016/S0968-090X(01)00005-5 [3] ZHANG H M, RECKER W W. On optimal freeway rampcontrol policies for congested traffic corridors[J]. Transportation Research Part B, 1999, 33: 417-436. doi: 10.1016/S0191-2615(98)00045-9 [4] 李志纯, 谷强, 史峰. 弹性需求下拥挤道路收费的模型与算法研究[J]. 交通运输工程学报, 2001, 1(3): 81-85. http://transport.chd.edu.cn/article/id/200103020LI Zhi-chun, GU Qiang, SHI Feng. Toll model and algorithm of roadjammed with traffic based on elastic demand[J]. Journalof Traffic and Transportation Engineering, 2001, 1(3): 81-85. (in Chinese) http://transport.chd.edu.cn/article/id/200103020 [5] 史峰, 李志纯. 拥挤道路使用收费的理论构架[J]. 交通运输工程学报, 2002, 2(2): 78-82. http://transport.chd.edu.cn/article/id/200202019SHI Feng, LI Zhi-chun. Theoretic framework and development on research of congested road-use pricing[J]. Journal of Traffic and Transportation Engineering, 2002, 2(2): 78-82. (in Chinese) http://transport.chd.edu.cn/article/id/200202019 [6] CHIEN C C, ZHANG Y, IOANNOU P A. Traffic density control for automated highway systems[J]. Automatica, 1997, 33(7): 1273-1285. [7] PAYNE H J. Models of freeway traffic and control[J]. Mathematical Models of Public Systems, 1971, 1: 51-61. [8] KOHAN R R. Robust state estimation and control of highway traffic systems[D]. Toronto: University of Toronto, 2001. [9] PAPAGEORGIOU M, BLOSSEVILLE J M, HADJ-SALEM H. Modelling and real time control of traffic flow on the southern part of boulevard periherique in Paris[J]. Transportation Research Part A, 1990, 24: 345-359. [10] WANG Y, PAPAGEORGIOU M, MESSMER A. A realtime freeway network traffic surveillance tool[J]. IEEE Transactions on Control Systems Technology, 2006, 14(1): 18-32. -


 点击查看大图
点击查看大图
图(9) / 表(3)
计量
- 文章访问数: 362
- HTML全文浏览量: 158
- PDF下载量: 226
- 被引次数: 0
