

Work strategies of torque converter for vehicle with continuously variable transmission system
Article Text (Baidu Translation)
-
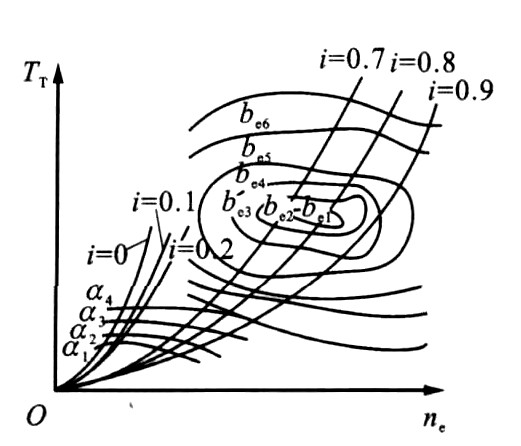
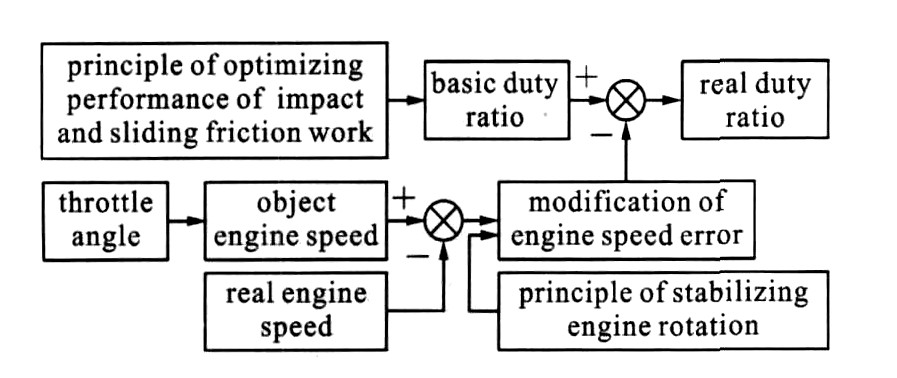
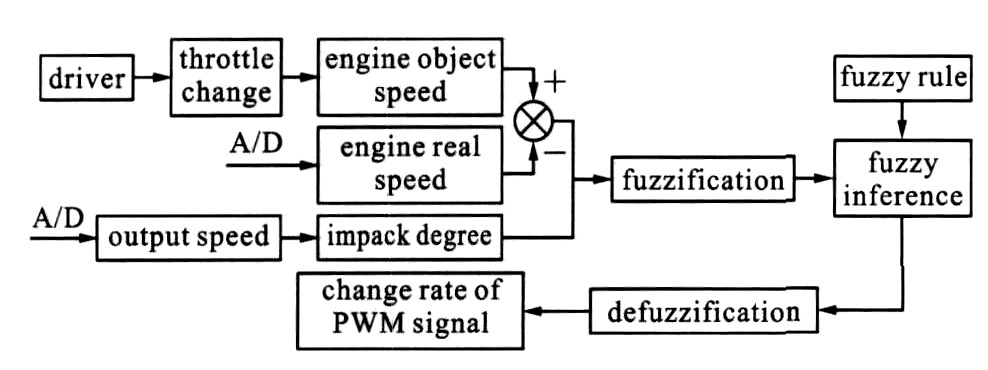
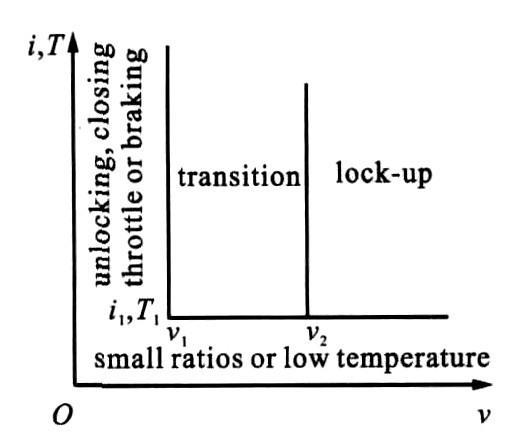
摘要: 为了提高无级变速汽车液力变矩器工作的燃料经济性, 确定了液力变矩器锁止、解锁的合理条件。为了提高液力变矩器解锁时的工作效率, 利用无级变速器速比调节功能, 设计了PID控制器, 使得发动机-液力变矩器始终工作在最佳经济区域。为了减少液力变矩器锁止时的冲击, 以允许冲击度范围内滑磨功最小与发动机稳定运转2个原则, 提出了锁止离合器接合的控制策略, 设计了以冲击度和发动机转速差为输入量的模糊控制器。两种不同锁止情况试验结果表明: 急加速(1.92 s) 比缓加速(1.38 s) 延长了接合时间, 因此, 利用控制策略能够保证锁止离合器接合平稳和发动机的稳定运转。Abstract: In order to improve the operating fuel economy of torque converter for vehicle with continuously variable transmission (CVT) system, the optimal lock-up and unlocking conditions were confirmed.To furtherly improve the work efficiency of torque converter in unlocking stage, PID controller was designed, so that engine and torque converter worked in optimal economy region by adjusting the speed ratio of CVT.To decrease the impact during the lock-up process of torque converter, the control strategies of lock-up clutch engagement were put forward according to the principles of stabilizing engine rotation and optimizing the performance of impact and sliding friction work, and the fuzzy controller with two inputs of impact degree and rotate speed difference was designed.The experimental result under two kinds of different lock-up states shows that the 1.92 s in quick acceleration is bigger than the 1.38 s in slow acceleration, the engagement time is prolonged, so the control measures can ensure the engaging smoothness of torque converter and stabilize engine rotate speed.
-
Key words:
- automobile engineering /
- torque converter /
- speed ratio control /
- lock-up control
-
[1] SUN Dong-ye, QIN Da-tong. Study on integrated control strategy for a car with a hydro-mechanical continuously variable transmission system[J]. Chinese Journal of Mechanical Engineering, 2003, 39 (2) : 102-105. (in Chinese) doi: 10.3901/JME.2003.02.102 [2] WANG Hong-yan, QIN Da-tong, ZHOU Yun-shan. Studyon synthesized control method of continuously variable trans-mission system of car[J]. Chinese Journal of Mechanical Engineering, 2000, 36 (2) : 38-41. (in Chinese) doi: 10.3901/JME.2000.02.038 [3] ABO K, KOBAYASHI M, KUROSAWA M. Development of a metal belt-drive CVT incorporating a torque converter for use with 2-liter class engines[J]. SAE Transactions, 1998, 107 (6) : 1241-1248. https://www.sae.org/publications/technical-papers/content/980823/ [4] SAKAGUCHI S, KI MURA E, YAMAMOTO K. Development of an engine-CVTintegrated control system[J]. SAE Transactions, 1999, 108 (6) : 1386-1394. https://www.sae.org/publications/technical-papers/content/1999-01-0754/ [5] ZHANG Tai, GE An-lin, TANG Chun-xue. Dynamic char-cteristics study on automated mechanical transmission lock-up and slip hydraulic control system of off-road vehicle[J]. Automotive Technology, 2007, 38 (1) : 20-25. (in Chinese) [6] XU An, QIAO Xiang-ming, LIU Sheng-tian. Control strategyontorque converter clutch of automatic transmissions[J]. Automotive Engineering, 2004, 26 (3) : 283-286. (in Chinese) https://www.researchgate.net/publication/267650001_Torque_Converter_Clutch_Low_Slip_Speed_Detection_and_Control [7] LIU Zhen-jun, QIN Da-tong, HU Jian-jun. The control ofstarting process for CVTcar withtorque converter[J]. Auto-motive Engineering, 2002, 24 (5) : 387-390. (in Chinese) [8] SHEN Chang-lu, ZHOU Feng, XU Jin-jun. Calculation of the automobile automatic transmission shift rule[J]. Machinery Design and Manufacture, 2004, 40 (6) : 15-17. (in Chinese) [9] ZHANG Xin-rong, HUANG Zong-yi. Hardware-in-the-loop experi ment of electronic control unit for automatic transmissions[J]. Journal of Chang an University: Natural Science Edition, 2005, 25 (6) : 78-81. (in Chinese) [10] GLIELMO L, VASCA F. Optimal control of dry clutch engagement[J]. SAE Transactions, 2000, 109 (6) : 1233-1239. https://www.sae.org/publications/technical-papers/content/2000-01-0837/ [11] ZHANG Yong, YIN Cheng-liang, ZHANG Jian-wu. Adaping fuzzy control for anti-lock braking systemand its experi mentof rapid control prototyping[J]. Journal of Chang'an University: Natural Science Edition, 2006, 26 (2) : 91-94. (in Chinese) -

 下载:
下载:


 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 296
- HTML全文浏览量: 103
- PDF下载量: 195
- 被引次数: 0
