

Influence of structure mode on distortion stiffness of bogie frame
Article Text (Baidu Translation)
-
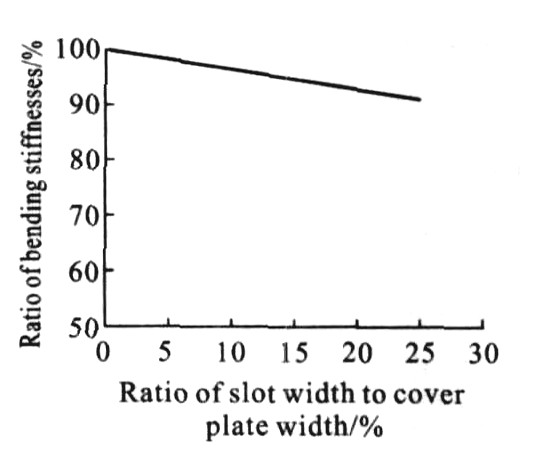
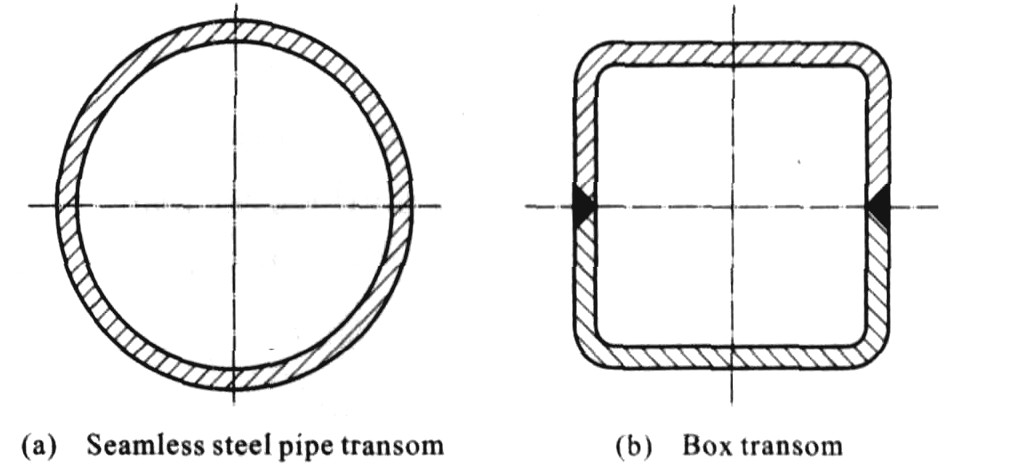
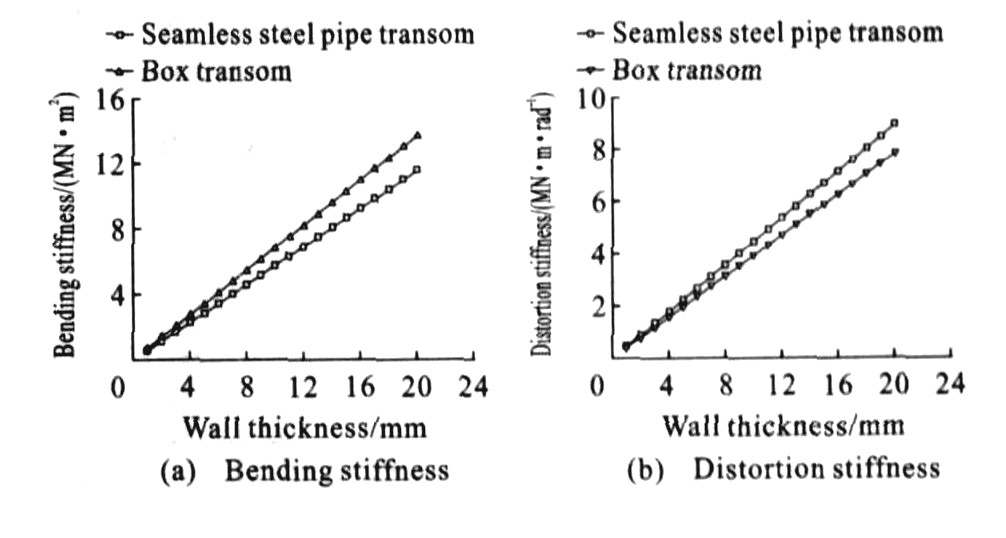
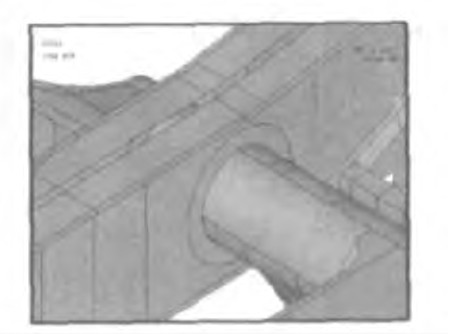
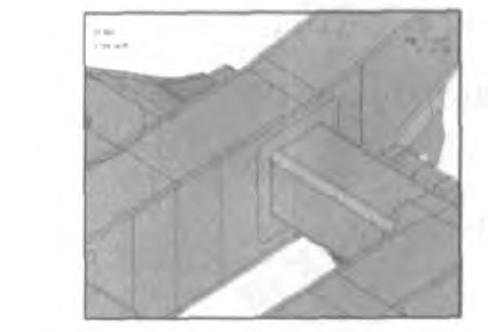
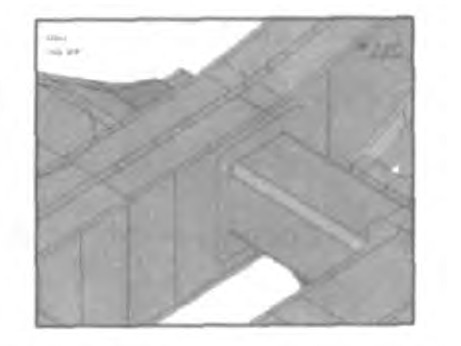
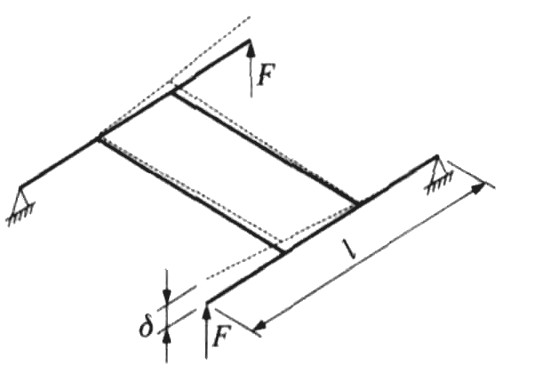
摘要: 将客车转向架焊接H形构架简化为由等截面直梁组成的模型, 通过考察各梁在扭转载荷下的变形分布, 研究降低构架扭转刚度的措施, 并采用有限元方法对理论分析结果进行了验证。计算结果表明: 侧梁上盖板开槽能使构架扭转刚度降低3%;改变横梁截面形式后, 构架扭转刚度将减小19%, 构架在超常载荷下的最大von_Mises应力降低3%。分析结果表明: 构架侧梁上盖板开槽对其扭转刚度影响不大, 并将引起局部区域较强的应力集中; 横梁弯曲与扭转刚度对转向架构架扭转刚度有较大影响, 将无缝钢管横梁改为箱型梁能够显著降低构架扭转刚度; 同时, 由于扭转刚度降低, 构架在超常载荷下最大von_Mises应力也有所降低, 轨道扭曲载荷对构架强度的影响减弱。Abstract: The H-type welding frame of passenger car bogie was simplified to the model composed of straight girders with uniform sections, the measures to reduce the distortion stiffness of the bogie frame was researched by observing the deformation distributions of different girders under distortion load, and verified by using FEM. It is pointed that the distortion stiffness of the frame can be reduced by 3% when slotting on the cover plate of side sill, when changing the section of transom, the stiffness can be reduced by 19%, and the maximum von_Mises stress under over load can be reduced by 3%. The result indicates that there is less influence on the stiffness when slotting on the cover plate of side sill, but it will cause strong stress concentration in local areas. The bending and distortion stiffnesses of transom should affect the distortion stiffness of the frame strongly. Changing circular section to box section can reduce the distortion stiffness of the frame obviously. The maximum von_Mises stress of the frame under over load situation is lower because of the reduction of the distortion stiffness. The influence of track warping load on the strength of the frame has abated.
-
Key words:
- vehicle engineering /
- distortion stiffness /
- structure mode /
- bogie /
- frame
-
表 1 Calculation results of bogie frame stiffness and strength
Table 1. Calculation results of bogie frame stiffness and strength

 下载: 导出CSV
下载: 导出CSV
-
[1] RUBEL M. Influence of types of structural stiffness of the bogie frame on the resiliency properties of the bogie[C]∥ZOBORYI. Proceedings of the6th International Conference on Rail way Bogies and Running Gears. Budapest: BUTE, 2004: 277-286. [2] ORLOVA A, BORONENKO Y, SCHEFFEL H, et al. Tuning von güterwagendrehgestellen durch radsatzkopplungen[J]. ZEV Rail Glasers Annalen, 2002, 126 (9) : 200-212. [3] WUPing-bo, XUEShi-hai, YANG Chen-hui. Dynamic response of high-speed passenger car based onflexible car body model[J]. Journal of Traffic and Transportation Engineering, 2005, 5 (2) : 5-8. (in Chinese) https://www.researchgate.net/publication/290805801_Dynamic_response_of_high-speed_passenger_car_based_on_flexible_car_body_model [4] YANG Bin, SUN Qing-hong, HUANG Wen-jie, et al. Static strength and mode analysis of B-type subway body[J]. Journal of Traffic and Transportation Engineering, 2006, 6 (2) : 1-5. (in Chinese) https://www.researchgate.net/publication/294296560_Static_strength_and_mode_analysis_of_B-type_subway_body [5] MI Cai-ying, AN Qi, LI Fu. Calculation method of wheelset natural frequency based on transfer matrixes[J]. Journal of Traffic and Transportation Engineering, 2006, 6 (4) : 20-22. (in Chinese) https://www.hindawi.com/journals/ace/2019/2156475/ [6] MI Cai-ying, AN Qi, LI Fu. Dynamic property analysis of axle shaft of high-speed train[J]. Journal of Traffic andTransportation Engineering, 2007, 7 (4) : 1-5. (in Chinese) https://oversea.cnki.net/kcms/detail/detail.aspx?dbcode=cjfd&dbname=cjfd2007&filename=JYGC200704003 [7] WANG Wen-jing, SUN Shou-guang, LI Qiang. Dynamic stress simulation of flexible bogie frame[J]. Journal of the China Rail way Society, 2006, 28 (1) : 44-49. (in Chinese) https://www.sciencedirect.com/science/article/pii/1350630795000305 [8] REN Zun-song, SUN Shou-guang, LI Qiang, et al. Simulation of railway bogie dynamic stress and elastic vibration[J]. Chinese Journal of Mechanical Engineering, 2004, 40 (8) : 187-192. (in Chinese) [9] 95J01-M, temporary provision of strength design and test for rail vehicle by speed of 200km. h-1[S]. (in Chinese) [10] JIS E4207—1992, truck frames for rail way rolling stock-general rules for design[S]. [11] LI Fu, FU Mao-hai. Research on development and operation of high speed passenger car bogies[J]. Rolling Stock, 2004, 42 (10) : 1-7. (in Chinese) https://en.cnki.com.cn/Article_en/CJFDTOTAL-TDCL200410000.htm [12] BAO Shi-hua, ZHOU Jian. Structural Mechanics of Thinwalled Bar[M]. Beijing: China Architecture and Building Press, 2006. (in Chinese) [13] UIC515-4/1993, passenger rolling stock-trailer bogies-running gear-bogie frame structure strength tests[S]. -

 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 421
- HTML全文浏览量: 129
- PDF下载量: 256
- 被引次数: 0
