

Fusion monitoring system of locomotive wheelset state
Article Text (Baidu Translation)
-
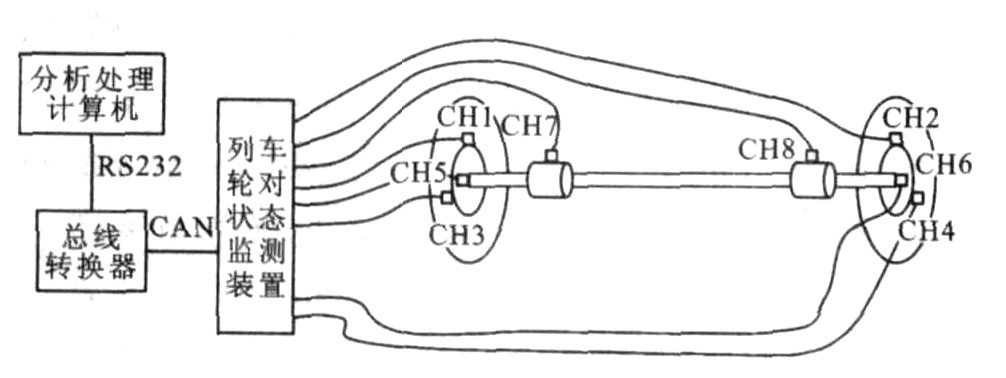
摘要: 为了提高列车轮对故障诊断准确率和改善现有列车轮对状态在线监测方法的不确定性, 结合多传感器信息融合原理, 设计了列车轮对融合监测系统, 采用特征层融合自适应加权算法进行了轮对状态融合监测, 以自适应的方式寻求最优加权因子, 使状态测量值总均方误差最小, 比较了特征层融合自适应加权算法、模糊数据关联算法、变结构多模的状态估计算法和BP神经网络算法的计算结果。比较结果表明: 当轮对两端轴承均出现故障后, 两传感器输出的测量值分别为22.0470和21.0250, 而此融合算法计算出的估计值为4.2642, 融合值最接近真值, 因此, 列车轮对融合监测系统可靠性高, 抗干扰性强。Abstract: In order to improve the accuracy of fault diagnosis and the uncertainty of current online condition monitoring methods for locomotive wheelset, a fusion monitoring system of locomotive wheelset was designed based on multi-sensor information fusion principle. The state of locomotive wheelset was monitored by using feature level fusion adaptive weighting algorithm, and the measured values were weighted adaptively to obtain the least-mean-square error of the measured values. The results computed by feature level fusion adaptive weighting algorithm, fuzzy data association algorithm, variable structure multiple-model estimation algorithm and BP nerve network(BPNN) algorithm were compared. Comparison result shows that when the fault occurs in the bearings of wheelset, the measured values are 22.047 0 and 21.025 0 respectively, while the estimation value from the fusion algorithm is 4.264 2, so the system has high reliability and better anti-disturbance.
-
Key words:
- locomotive wheelset /
- fusion monitoring system(FMS) /
- multi-sensor /
- fault diagnosis
-
表 1 融合数据
Table 1. Fusion data
测量组 传感器编号 采样数据/(m·s-2) 对应加权因子 真值 融合后估计值 平均值 第1组 CH1 1.013 0 0.077 8 1 1.002 4 1.005 3 CH2 1.005 0 0.268 2 CH3 0.997 0 0.559 7 CH4 0.978 0 0.053 5 CH5 1.081 0 0.011 0 CH6 0.928 0 0.014 0 第2组 CH1 1.018 0 0.199 5 1 1.047 6 1.864 7 CH2 1.015 0 0.202 0 CH3 1.020 0 0.197 4 CH4 0.989 0 0.196 8 CH5 6.085 0 0.007 3 CH6 0.986 0 0.196 0 第3组 CH1 21.542 0 0.003 4 1 2.057 5 4.607 2 CH2 1.010 0 0.189 4 CH3 1.015 0 0.200 1 CH4 0.980 0 0.201 4 CH5 1.013 0 0.194 7 CH6 0.984 0 0.217 9 第4组 CH1 22.047 0 0.006 4 1 4.264 2 7.840 9 CH2 21.025 0 0.006 7 CH3 1.012 0 0.225 8 CH4 1.007 0 0.235 7 CH5 0.998 0 0.256 4 CH6 0.997 0 0.244 8  下载: 导出CSV
下载: 导出CSV
-
[1] 应立军, 周书武, 亓琳, 等. 08-32捣固车电气系统在线监测与故障诊断系统[J]. 交通运输工程学报, 2004, 4(4): 34-36. doi: 10.3321/j.issn:1671-1637.2004.04.009YI NG Li-jun, ZHOUShu-wu, QI Lin, et al. On-line moni-toring and fault diagnosis systemfor electric system of 08-32tamper[J]. Journal of Traffic and Transportation Engineering, 2004, 4(4): 34-36. (in Chinese) doi: 10.3321/j.issn:1671-1637.2004.04.009 [2] 吴浩中, 王开文. 小波包-神经网络在摆式列车倾摆控制系统故障诊断中的应用[J]. 交通运输工程学报, 2003, 3(2): 27-30. doi: 10.3321/j.issn:1671-1637.2003.02.006WU Hao-zhong, WANG Kai-wen. Fault diagnosis using wavelet packet and neural networkintilting control systemof tilting train[J]. Journal of Traffic and Transportation Engi-neering, 2003, 3(2): 27-30. (in Chinese) doi: 10.3321/j.issn:1671-1637.2003.02.006 [3] 徐冬芳, 邓飞其. 基于多传感器数据融合的智能故障诊断系统[J]. 仪器仪表学报, 2004, 25(4): 404-406. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB2004S1174.htmXU Dong-fang, DENG Fei-qi. Artificial fault diagnosis sys-tem based on data fusion algorithm[J]. Chinese Journal of Scientific Instrument, 2004, 25(4): 404-406. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB2004S1174.htm [4] SKARI ATOS D, KARAKASIS K, TROCHIDIS A. Rail way wheel fault diagnosis using a fuzzy-logic method[J]. Applied Acoustics, 2004, 65(10): 951-966. doi: 10.1016/j.apacoust.2004.04.003 [5] 黄采伦. 列车轮对在线状态监测理论与方法研究[D]. 长沙: 中南大学, 2008. [6] HALL D L, LLI NAS J. Anintroduction to multisensor data fusion[J]. Proceedings of the IEEE, 1997, 85(1): 6-23. doi: 10.1109/5.554205 [7] 穆荣军, 崔乃刚. 多传感器优化融合模型的理论与仿真研究[J]. 仪器仪表学报, 2006, 27(6): 326-328. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB2006S1125.htmMU Rong-jun, CUI Nai-gang. Theoretical and si mulation re-search on opti mizinginformation fusion method for multisen-sor[J]. Chinese Journal of Scientific Instrument, 2006, 27(6): 326-328. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB2006S1125.htm [8] 李若琼, 李欣, 董海鹰. 基于证据理论的多信息融合故障诊断研究[J]. 自动化仪表, 2006, 27(12): 1-4. doi: 10.3969/j.issn.1000-0380.2006.12.001LI Ruo-qiong, LI Xin, DONG Hai-ying. Study on the multi-in-formation fusion fault diagnosis based on evidential theory[J]. Process Automation Instrumentation, 2006, 27(12): 1-4. (in Chinese) doi: 10.3969/j.issn.1000-0380.2006.12.001 [9] DASARATHY B V. Information fusion—a status update[J]. Information Fusion, 2007, 8(4): 335-336. doi: 10.1016/j.inffus.2007.04.004 [10] BASIR O, YUAN Xiao-hong. Engine fault diagnosis based on multi-sensor information fusion using Dempster-Shafer evidence theory[J]. Information Fusion, 2007, 8(4): 379-386. doi: 10.1016/j.inffus.2005.07.003 [11] OVASKA S J, VANLANDI NGHAM H F, KAMIYA A. Fusion of soft computing and hard computing in industrial applications: an overview[J]. IEEE Transactions on Systems Man and Cybernetics, Part C Applications and Reviews, 2002, 32(2): 72-79. doi: 10.1007/3-540-32391-0_40 [12] 黄丹, 黄采伦. 基于BP神经网络模型的电机故障诊断专家系统[J]. 自动化仪表, 2003, 24(3): 15-17. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDYB200303002.htmHUANG Dan, HUANG Cai-lun. BP neural network model based expert systemof fault diagnostic of electrical mechinery[J]. Process Automation Instrumentation, 2003, 24(3): 15-17. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDYB200303002.htm [13] HOU Zhi-jian, LI AN Zhi-wei, YAO Ye, et al. Data mining based sensor fault diagnosis and validation for building air conditioning system[J]. Energy Conversion and Manage-ment, 2006, 47(15/16): 2479-2490. https://www.sciencedirect.com/science/article/pii/S0196890405003031 -

 点击查看大图
点击查看大图

图(6) / 表(1)
计量
- 文章访问数: 507
- HTML全文浏览量: 146
- PDF下载量: 283
- 被引次数: 0
