

Estimating methods of link travel times based on data fusion technology
Article Text (Baidu Translation)
-
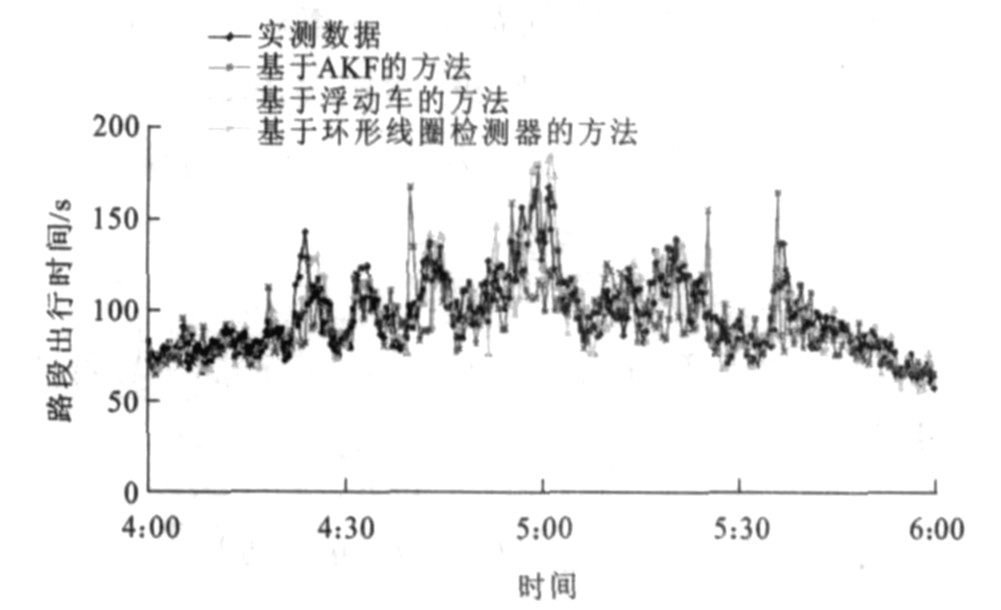
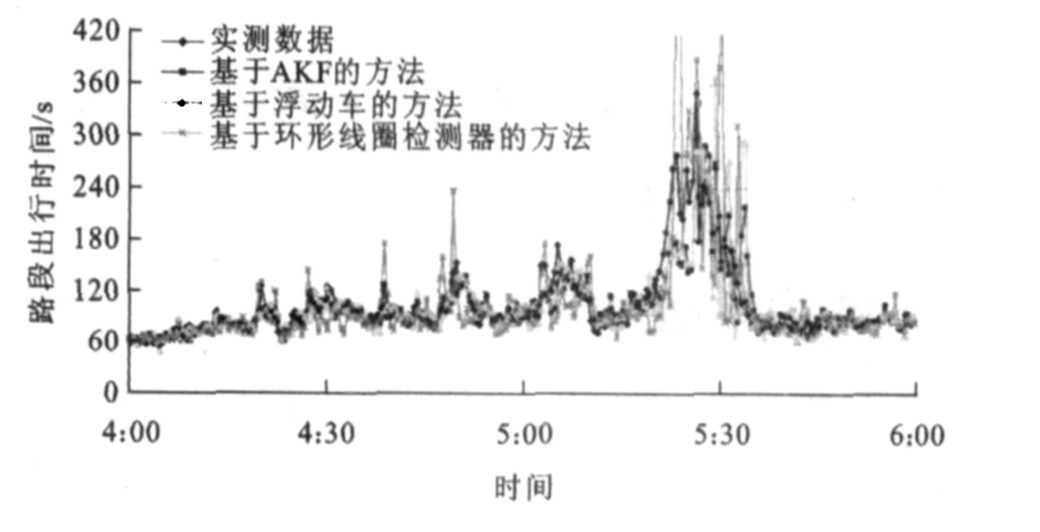
摘要: 为了精确预测路段出行时间, 分析了国内外基于多数据源的路段出行时间预测方法的优缺点, 应用自适应卡尔曼滤波算法, 通过融合环形线圈检测器数据和浮动车数据, 建立了路段出行时间估计模型, 在交通高峰期和事故情况下, 比较了采用基于环形线圈检测器、浮动车和自适应卡尔曼滤波3种出行时间预测方法预测路段出行时间的平均绝对百分比误差。比较结果表明: 基于自适应卡尔曼滤波算法融合了来自环形线圈检测器和浮动车的数据, 预测值更接近实测值, 预测精度高。Abstract: In order to exactly predict link travel times, the advantages and disadvantages of existing prediction methods were analyzed, adaptive Kalman filter algorithm was used, and link travel time estimation models were presented by combining traffic data from probe vehicles and loop detection. Adaptive Kalman filter(AKF) algorithm-based link travel time estimation models were compared with loop detector data-based methods and probe vehicles-based methods under the circumstances of peak hours and traffic accident, the average absolute percentages of the computation error were analyzed. Analysis result indicates that AKF algorithm is an effective method that may fuse the traffic data from different sources, its predictive values are closer to the measured values so its prediction accuracy is higher.
-

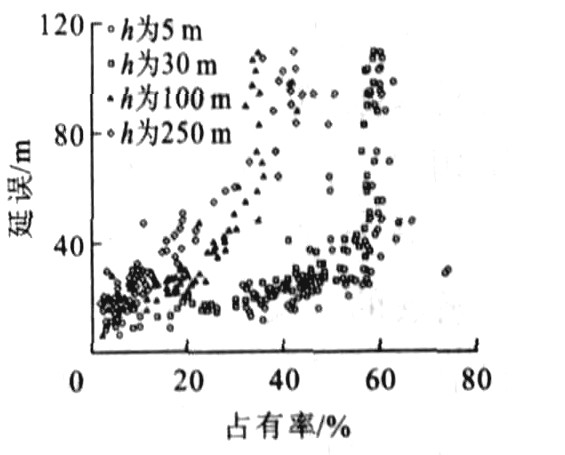
图 2 延误与占有率、检测器位置关系
Figure 2. Relationship among delays, occupancy rates and detector locations
-
[1] 吴志周, 杨晓光, 高佳发. ATIS数据融合模型的研究[J]. 交通与计算机, 2005, 23(2): 7-10. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200502002.htmWU Zhi-zhou, YANG Xiao-guang, GAO Jia-fa. ATIS data fusion models research[J]. Computer and Communications, 2005, 23(2): 7-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200502002.htm [2] NELSONP, PALACHARLAP. Aneural network model for data fusionin ADANCE[C]∥IEEE. Proceedings of Pacific Ri m Conference. Seattle: IEEE, 1993: 237-243. [3] TARKO A, ROUPHAILL N M. Travel ti me data fusion in ADVANCE[C]∥ASCE. The third ASCEInternational Confer-ence on Applications of Advanced Technologies in Transportation Engineering. Washington DC: ASCE, 1993: 36-42. [4] VAN A, HELLINGA MB, YUL, et al. Vehicle probes as real-ti me ATMS sources of dynamic O-Dand travel ti me data[C]∥ATMS. Large Urban Systems-proceedings of the ATMS Conference. Petersburg: ATMS, 1993: 207-230. [5] HELLI NGA B, FU L. Assessing expected accuracy of probe vehicle travel ti me reports[J]. Journal of Transportation En-gineering, 2000, 125(6): 524-530. https://trid.trb.org/view/511482 [6] SEN A, THAKURI AHP, ZHU X. Frequency of probe re-ports and variance of travel ti me esti mates[J]. Journal of Transportation Engineering, 1997, 123(4): 290-297. doi: 10.1061/(ASCE)0733-947X(1997)123:4(290) [7] 熊烈强, 王要武, 李杰. 交通流动力学的理论、模型及应用[J]. 哈尔滨工业大学学报, 2006, 38(5): 732-734. doi: 10.3321/j.issn:0367-6234.2006.05.018XIONG Lie-qiang, WANG Yao-wu, LI Jie. Theory models and application about traffic dynamics[J]. Journal of Harbin Institute of Technology, 2006, 38(5): 732-734. (in Chinese) doi: 10.3321/j.issn:0367-6234.2006.05.018 [8] MEHRA R K. Approaches to adaptive filtering[J]. IEEE Transactions on Automatic Control, 2000, 17(4): 693-698. https://ieeexplore.ieee.org/document/1100100 [9] LAWRENCE K A. 多传感器数据融合理论及其应用[M]. 戴亚平, 译. 北京: 北京理工大学出版社, 2004. -

 下载:
下载:


 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 388
- HTML全文浏览量: 138
- PDF下载量: 532
- 被引次数: 0
