

-
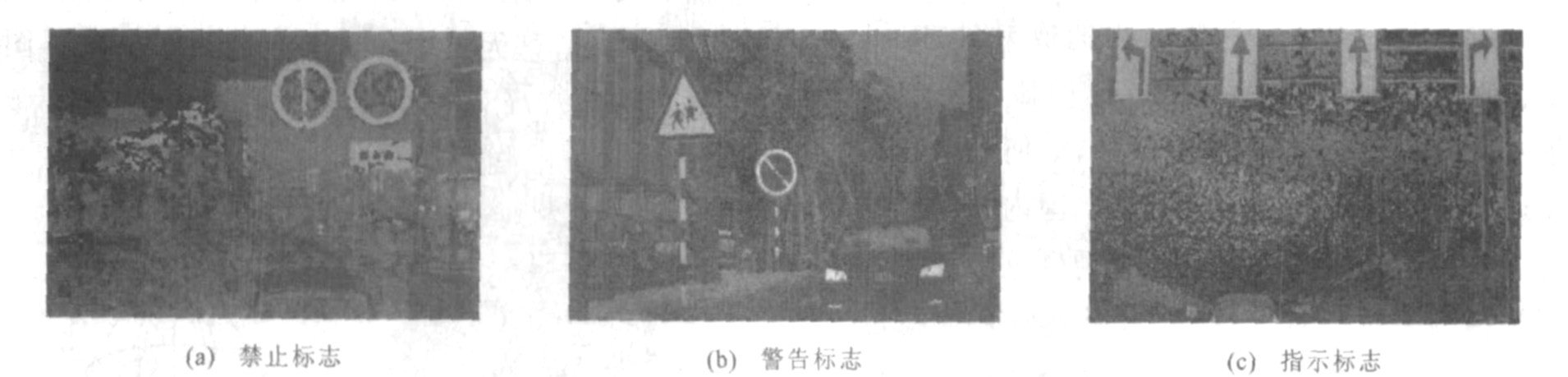
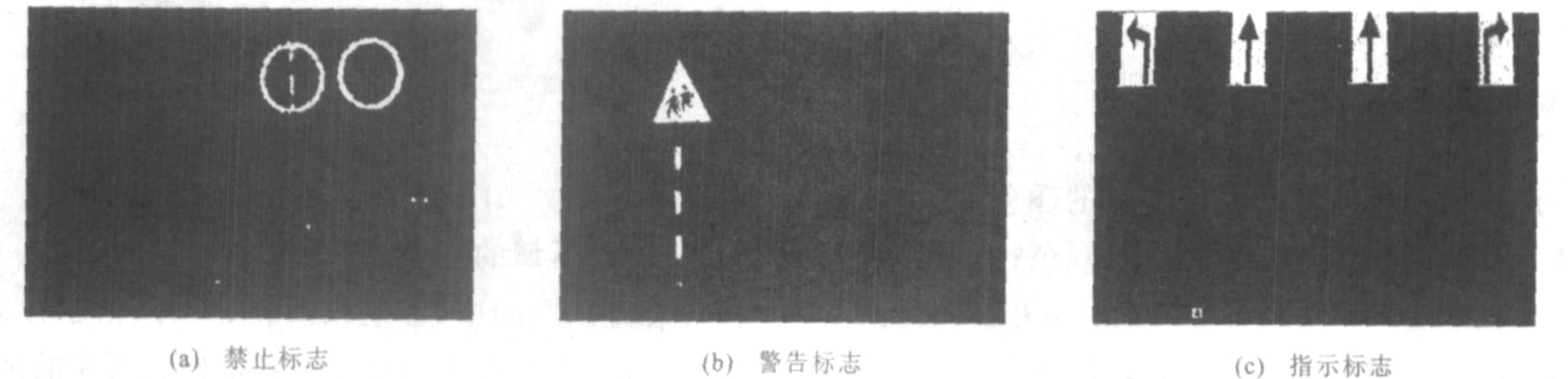
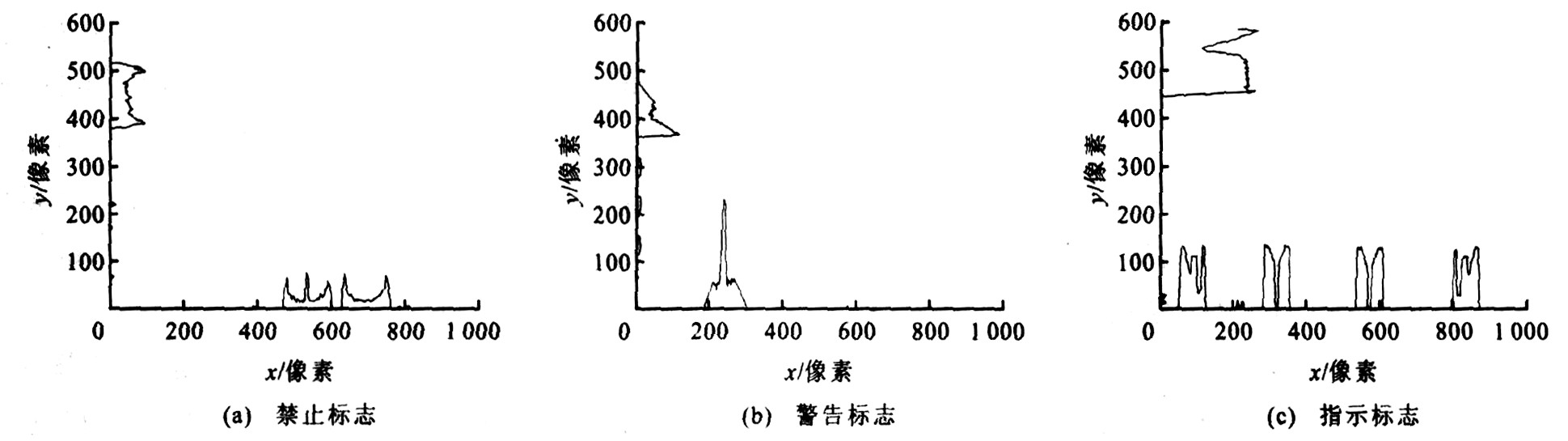
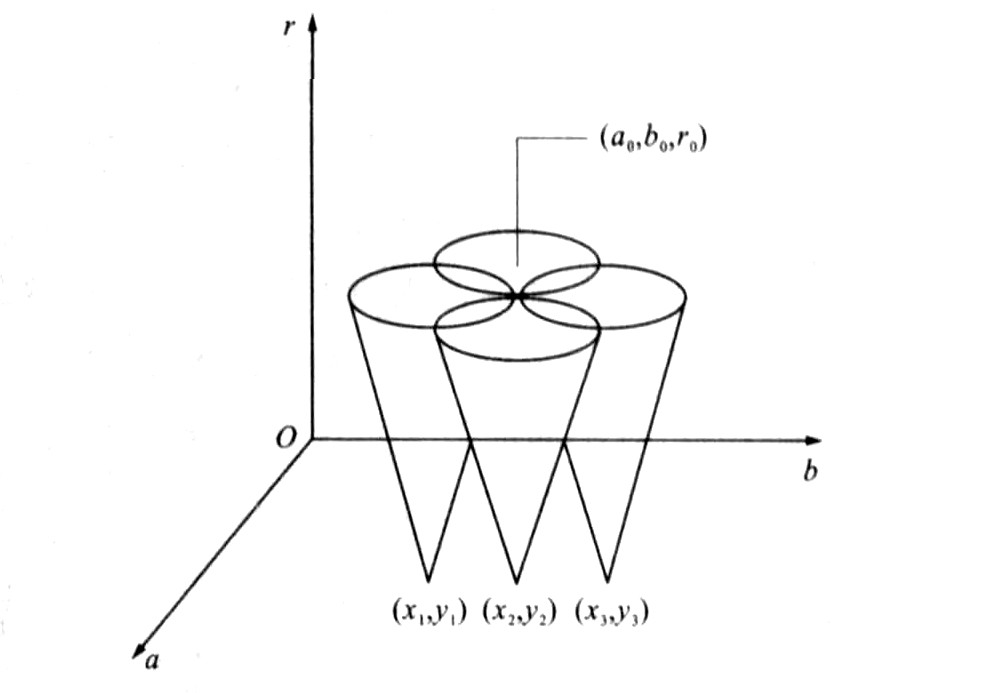
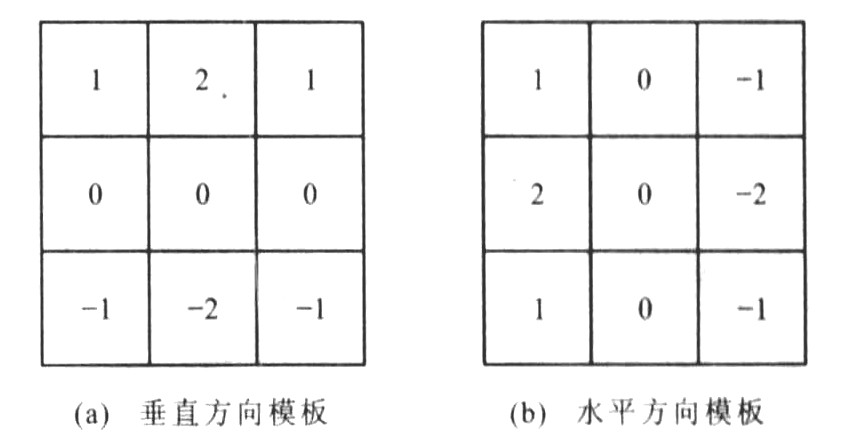
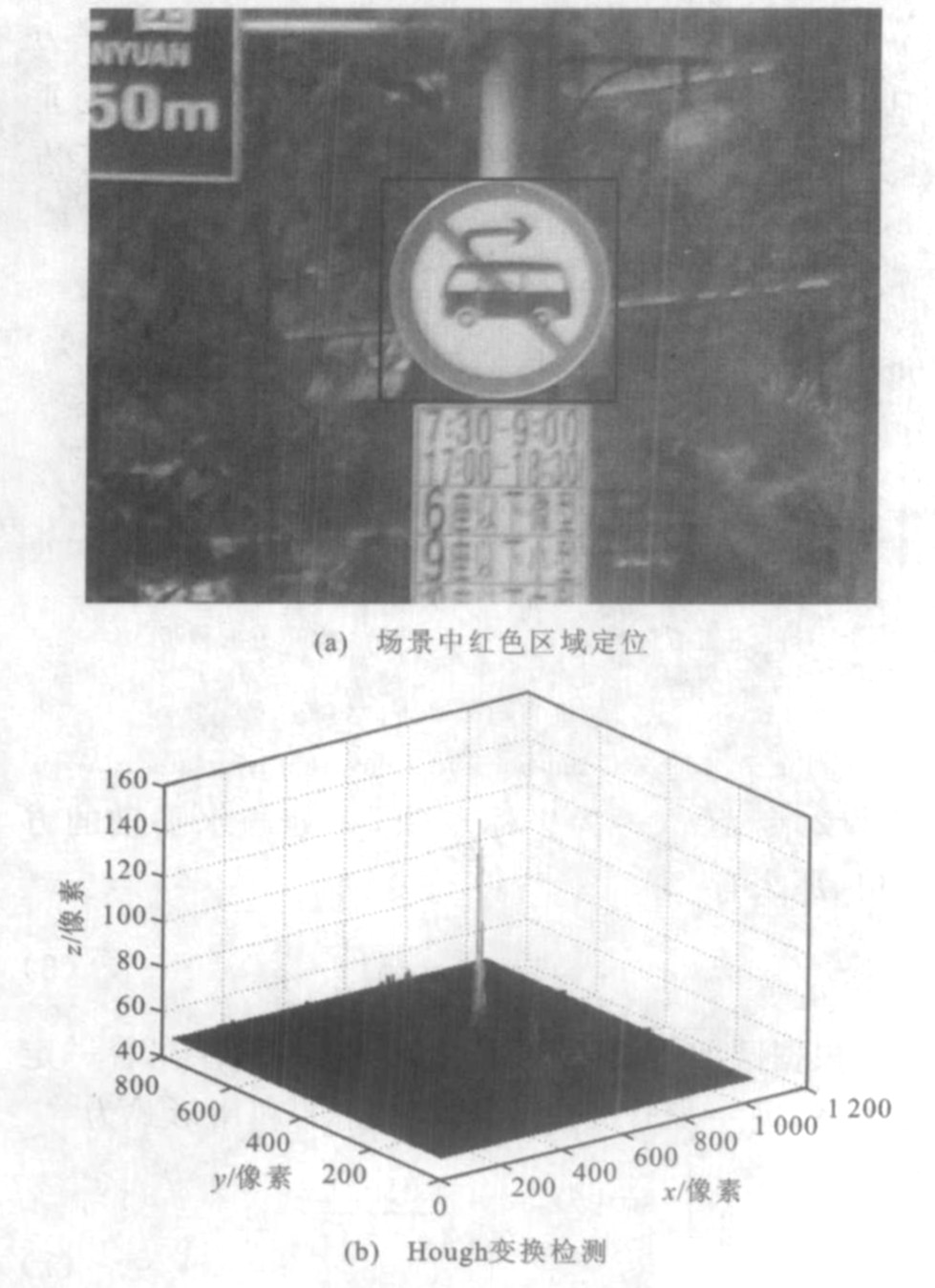
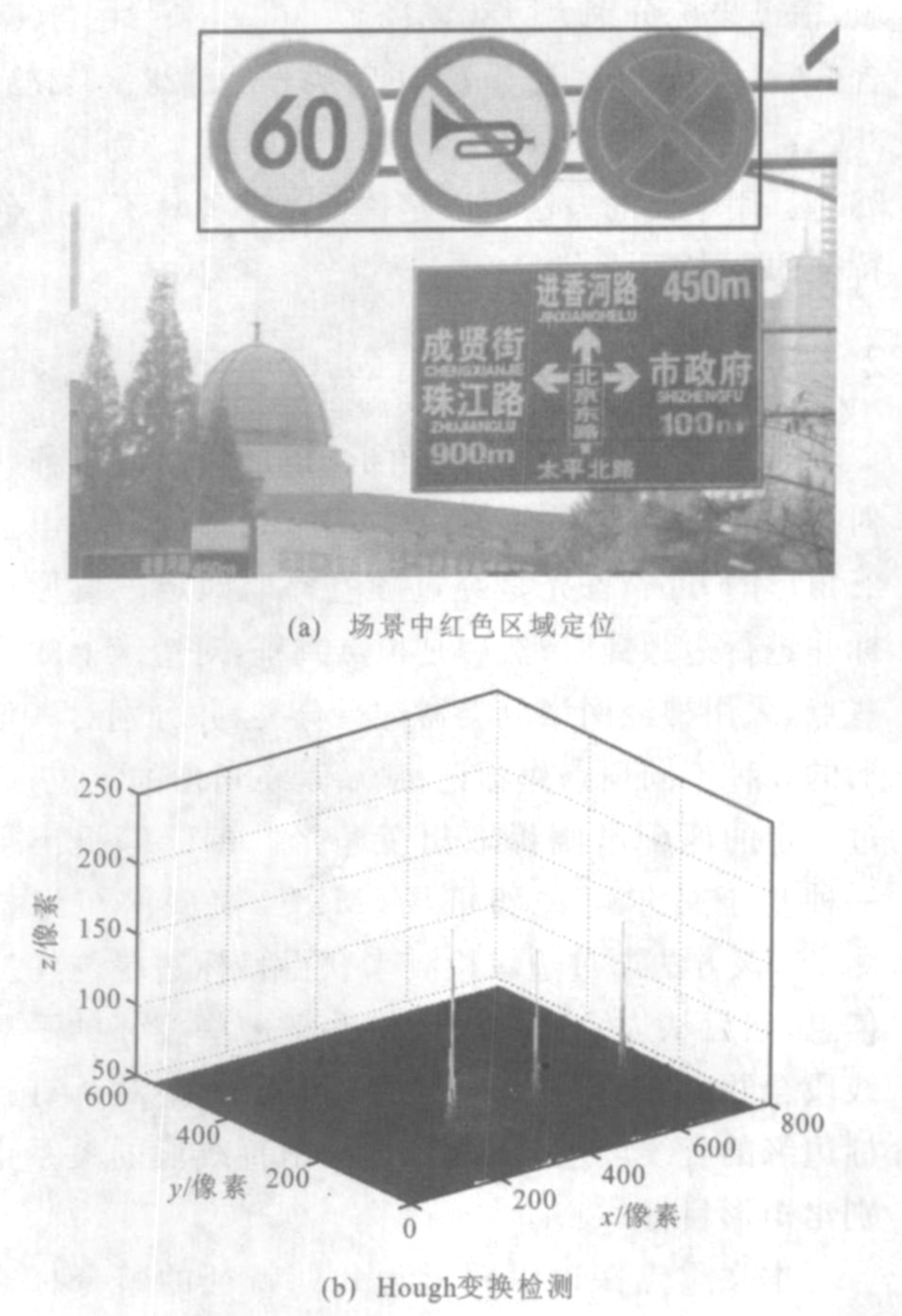
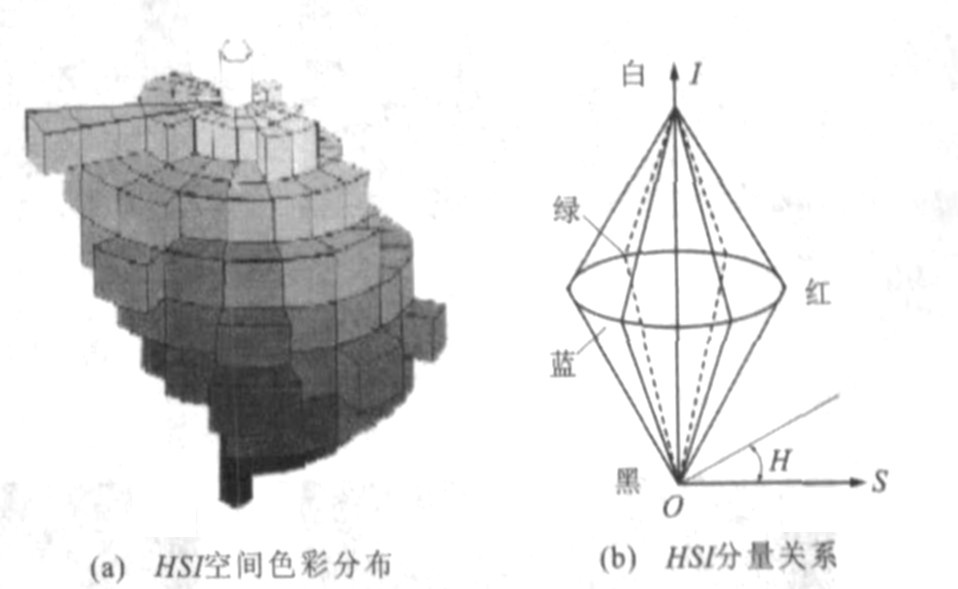
摘要: 为在车辆视觉导航中能快速识别道路场景中的交通标志, 通过提取标志的特征颜色与识别标志的特征形状来实现交通标志的检测。将道路场景RGB空间图像转换为HSI空间, 利用色调与饱和度融合的办法来提取道路场景中标志的特征颜色区域, 二值化后排除噪声并通过投影法得到正确的标志区域, 实现交通标志的定位。以红色禁令圆形交通标志为例, 提出一种改进的Hough变换方法来识别标志域内的几何特征——圆形标记。通过对不同条件下20幅含禁令标志的道路场景图像的检测试验, 发现本方法对交通标志颜色提取定位与几何特征图形识别的正确率都达到100%, 且平均检测时间为245ms。分析结果表明: 该方法能够快速、准确地确定标志区域, 同时对禁令标志几何图形识别具有较强的实时性和鲁棒性。
-
关键词:
- 交通信息工程 /
- 交通标志检测 /
- HSI空间 /
- 改进的Hough变换
Abstract: In order to quickly identify traffic signs in road scenes with vehicle visual navigation, a detection method was put forward by extracting the color characteristics of traffic signs and recognizing the shape characteristics of targets. The road scene image of RGB space was transformed into that of HSI space, a syncretic method of hue and saturation was used to extract the characteristic color area of sign in road scene, then traffic sign image was binarized, the noise was removed, and binarization target was projected to locate traffic sign. A red circular interdictory traffic sign was taken as example, and an improved Hough transform method was proposed to recognize the geometrics of the sign area. Analysis result shows that after 20 road scene tests, including interdictory traffic signs under different conditions, the detection rates of color area locations and geometric characteristics recognitions for traffic signs reach 100%, and the average detection time is 245 ms, so the method not only locates the sign area quickly and correctly, but also recognizes the geometric graph of interdictory traffic sign with real-time property and robustness. -
[1] 王荣本, 赵一兵, 李琳辉, 等. 智能车辆的障碍物检测研究方法综述[J]. 公路交通科技, 2007, 24(11): 109-113. doi: 10.3969/j.issn.1002-0268.2007.11.025WANG Rong-ben, ZHAO Yi-bing, LI Lin-hui, et al. Ap-proach reviewof obstacle detection for intelligent vehicle[J]. Journal of Highway and Transportation Research and Deve-lopment, 2007, 24(11): 109-113. (in Chinese) doi: 10.3969/j.issn.1002-0268.2007.11.025 [2] 左小清, 李清泉, 谢智颖. 基于车道的道路数据模型[J]. 长安大学学报: 自然科学版, 2004, 24(2): 73-76. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200402018.htmZUO Xiao-qing, LI Qing-quan, XIE Zhi-ying. Lane-based road data model[J]. Journal of Chang an University: Natural Science Edition, 2004, 24(2): 73-76. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200402018.htm [3] HSUS H, HUANG C L. Road sign detection and recogni-tion using matching pursuit method[J]. I mage and Vision Computing, 2001, 19(3): 119-129. https://www.sciencedirect.com/science/article/pii/S0262885600000500 [4] ARMI NGOL J M, ESCALERA A, HILARIO C, et al. In-telligent vehicle based on visual information[J]. Robotics and Autonomous Systems, 2007, 55(12): 904-916. doi: 10.1016/j.robot.2007.09.004 [5] SOETEDJO A, YAMADA K. Fast and robust traffic sign detection systems[C]∥IEEE. Proceedings of IEEE Interna-tional Conference on Systems, Man and Cybernetics. Waiko-loa: IEEE, 2005: 1341-1346. [6] MOUTARDE F, BARGETON A, HERBI N A, et al. Ro-bust on-vehicle real-ti me visual detection of American and Eu-ropean speedli mit signs, with a modular traffic signs recogni-tion system[C]∥IEEE. Proceedings of the Intelligent Vehi-cles Symposium. Istanbu: IEEE, 2007: 1122-1126. [7] 初秀民, 严新平, 毛喆. 道路标志自动分类方法[J]. 交通运输工程学报, 2006, 6(4): 91-95. doi: 10.3321/j.issn:1671-1637.2006.04.021CHU Xiu-min, YAN Xin-ping, MAO Zhe. Automatic classify method of traffic sign[J]. Journal of Traffic and Transpor-tation Engineering, 2006, 6(4): 91-95. (in Chinese) doi: 10.3321/j.issn:1671-1637.2006.04.021 [8] ESTABLE S, SCHICKJ, STEI N F, et al. Areal-ti me traf-fic sign recognition system[C]∥IEEE. Proceedings of the In-telligent Vehicles Symposium. Paris: IEEE, 1994: 213-218. [9] 冈萨雷斯. 数字图像处理[M]. 第2版. 阮秋琦, 阮宇智, 译. 北京: 电子工业出版社, 2005. [10] 朱双东, 张懿, 陆晓峰. 三角形交通标志的智能检测方法[J]. 中国图象图形学报, 2006, 11(8): 1127-1131. doi: 10.3969/j.issn.1006-8961.2006.08.013ZHU Shuang-dong, ZHANG Yi, LU Xiao-feng. Intelligent approach for triangle traffic sign detection[J]. Journal of I mage and Graphics, 2006, 11(8): 1127-1131. (in Chinese) doi: 10.3969/j.issn.1006-8961.2006.08.013 [11] LI U Y X, TAKESHI I, SATOSHI G. A MRF model-based approach to the detection of rectangular shape objectsin color i mages[J]. Signal Processing, 2007, 87(11): 2649-2658. https://www.sciencedirect.com/science/article/pii/S0165168407001715 [12] DAUGMANJ G. High confidence visual recognition of per-sons by a test of statistical independence[J]. IEEE Transac-tions on Pattern Analysis and Machine Intelligence, 1993, 15(11): 1148-1161. doi: 10.1109/34.244676 [13] VEELACERT P. Constructive fitting and extraction of geo-metric pri mitives[J]. Graphical Models and I mage Process-ing, 1995, 9(4): 233-251. https://www.sciencedirect.com/science/article/pii/S1077316997904330 [14] DAVIDE S, STEFANO P, PAOLO V. Ball detection and predictive ball following based on a stereoscopic vision system[C]∥IEEE. International Conference on Robotics and Automation. Barcelona: IEEE, 2005: 1561-1566. [15] KESODOS A L, PAPAMARKOS N. On the inverse hough transform[J]. Transactions on Pattern Analysis and Machine Intelligence, 1999, 21(12): 1329-1343. [16] 邢军. 基于Sobel算子数字图像的边缘检测[J]. 微机发展, 2005, 15(9): 48-49. https://www.cnki.com.cn/Article/CJFDTOTAL-WJFZ200509016.htmXI NG Jun. Edge detection of Sobel-based digital i mage[J]. Microcomputer Development, 2005, 15(9): 48-49. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-WJFZ200509016.htm -

 下载:
下载:


 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 438
- HTML全文浏览量: 169
- PDF下载量: 341
- 被引次数: 0
