

-
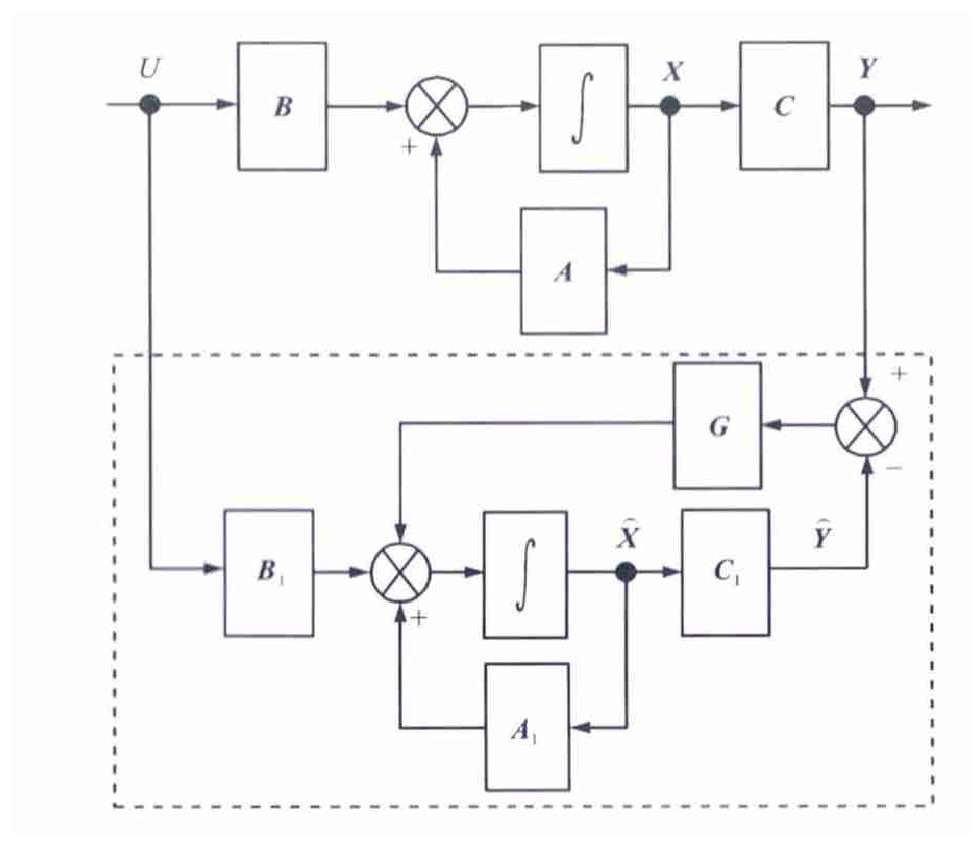
摘要: 为了有效抑制磁悬浮车轨耦合振动, 将车轨耦合振动系统简化为单铁-弹性轨道模型, 利用状态观测器将轨道梁振动信息引入控制系统, 设计了全状态反馈最优控制器, 并基于dSPACE搭建了小比例弹性轨道梁磁悬浮耦合振动试验台。与传统控制方法进行了对比, 发现所提出的控制方法能够在较小的轨道梁刚度与无阻尼条件下依然保持悬浮系统的稳定; 阶跃响应的试验台测试结果表明, 利用所设计的控制器, 系统能够在0.3s进入稳定状态, 超调量仅为4%。分析结果表明: 所提出的控制方法能够有效抑制磁悬浮车轨耦合振动, 在满足稳定悬浮的同时, 降低了系统稳定性对轨道梁特性的过分依赖。Abstract: In order to effectively control maglev-guideway coupling vibration, maglev-guideway coupling vibration system was simplified as electromagnet-elastic-track model.A full-state feedback optimum controller was developed.The guideway vibration information was introduced into the control system by state observer.A small-scale elastic-track magnetic levitation test rig was built using dSPACE.Compared with the traditional controller, the proposed control strategy can always keep the system stable, even the guideway is rather soft and no damping effect exists.Step response tested from the test rig indicates that the developed controller can stabilize the system in 0.3 swith a overshot of 4%.Analysis result shows that the control strategy is able to effectively restrain the coupling vibration.Moreover, it reduces the over-dependence of the system stability on the guideway beam properties based on satisfying maglev stability.
-
[1] YAN Lu-guang. Suggestion for selection of maglev option for Beijing-Shanghai high-speed line[J]. IEEE Transactions on Applied Superconductivity, 2004, 14 (2): 936-939. doi: 10.1109/TASC.2004.830324 [2] LEE H W, KIM K C, LEE J. Review of maglev train technologies[J]. IEEE Transactions on Magnetics, 2006, 42 (7): 1917-1925. doi: 10.1109/TMAG.2006.875842 [3] 翟婉明, 赵春发, 蔡成标. 磁浮列车与轮轨高速列车对线桥动力作用的比较研究[J]. 交通运输工程学报, 2001, 1 (1): 7-12. doi: 10.3321/j.issn:1671-1637.2001.01.002ZHAI Wan-ming, ZHAO Chun-fa, CAI Cheng-biao. On the comparison of dynamic effects on bridges of maglev trains with high-speed wheel/rail trains[J]. Journal of Traffic and Transportation Engineering, 2001, 1 (1): 7-12. (in Chinese). doi: 10.3321/j.issn:1671-1637.2001.01.002 [4] 邓永权, 罗世辉. 单磁铁系统的稳定性与仿真分析[J]. 电力机车与城轨车辆, 2005, 28 (5): 44-46. doi: 10.3969/j.issn.1672-1187.2005.05.014DENG Yong-quan, LUO Shi-hui. Stability research and simulation of a single magnetic system[J]. Electric Locomotives and Mass Transit Vehicles, 2005, 28 (5): 44-46. (in Chinese). doi: 10.3969/j.issn.1672-1187.2005.05.014 [5] 翟婉明, 赵春发. 磁浮车辆/轨道系统动力学(Ⅰ)——磁/轨相互作用及稳定性[J]. 机械工程学报, 2005, 41 (7): 1-10. doi: 10.3321/j.issn:0577-6686.2005.07.001ZHAI Wan-ming, ZHAO Chun-fa. Dynamics of maglev vehicle/guideway systems (Ⅰ) —magnet/rail interaction and system stability[J]. Chinese Journal of Mechanical Engineering, 2005, 41 (7): 1-10. (in Chinese). doi: 10.3321/j.issn:0577-6686.2005.07.001 [6] 陶兴. 中低速磁悬浮轨道梁关键设计参数研究[D]. 上海: 同济大学, 2008.TAO Xing. Research of key design parameters for low-speed magnetic levitation rail beam[D]. Shanghai: Tongji University, 2008. (in Chinese). [7] KIM Y C, KIM K H. Gain scheduled control of magnetic suspension system[C]∥IEEE. Proceedings of the American Control Conference. Baltimore: IEEE, 1994: 3127-3131. [8] ZHOU D F, HANSEN C H, LI J. Suppression of maglev vehicle-girder self-excited vibration using a virtual tuned mass damper[J]. Journal of Sound and Vibration, 2011, 330 (5): 883-901. doi: 10.1016/j.jsv.2010.09.018 [9] JAYAWANT B V, SINHA P K. Low-speed vehicle dynamics and ride quality using controlled D. C. electromagnets[J]. Automatica, 1977, 13 (6): 605-610. doi: 10.1016/0005-1098(77)90081-4 [10] 谢云德, 常文森. 电磁型(EMS) 磁悬浮列车系统铅垂方向的建模与仿真[J]. 铁道学报, 1996, 18 (4): 47-54. doi: 10.3321/j.issn:1001-8360.1996.04.008XIE Yun-de, CHANG Wen-sen. Modelling and simulation of electromagnetic suspension vehicle systems (EMS) in vertical direction[J]. Journal of the China Railway Society, 1996, 18 (4): 47-54. (in Chinese). doi: 10.3321/j.issn:1001-8360.1996.04.008 [11] 谢云德, 常文森. 电磁型磁浮列车单铁力的计算及运动稳定性和可控性研究[J]. 铁道学报, 1995, 17 (1): 41-48. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB501.006.htmXIE Yun-de, CHANG Wen-sen. Calculation of the force with single magnet and research of its suspension stability and controllability on electromagnetic suspension vehicle systems[J]. Journal of the China Railway Society, 1995, 17 (1): 41-48. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB501.006.htm [12] 方明霞, 屠娟, 冯奇, 等. 弹性车行道上磁悬浮列车系统的动力学研究[J]. 噪声与振动控制, 2001 (6): 23-26. doi: 10.3969/j.issn.1006-1355.2001.06.006FANG Ming-xia, TU Juan, FENG Qi, et al. Dynamics research of maglev train on elastic guideway[J]. Noise and Vibration Control, 2001 (6): 23-26. (in Chinese). doi: 10.3969/j.issn.1006-1355.2001.06.006 [13] 刘恒坤, 郝阿明, 常文森. 弹性轨道上的磁悬浮系统控制方法研究[J]. 控制工程, 2008, 15 (4): 392-394, 415. doi: 10.3969/j.issn.1671-7848.2008.04.013LIU Heng-kun, HAO A-ming, CHANG Wen-sen. On control methods of the magnetic suspension system on elastic track[J]. Control Engineering of China, 2008, 15 (4): 392-394, 415. (in Chinese). doi: 10.3969/j.issn.1671-7848.2008.04.013 [14] YAU J D. Vibration control of maglev vehicles traveling over a flexible guideway[J]. Journal of Sound and Vibration, 2009, 321 (1/2): 184-200. [15] 张翼, 胡基士, 蒋启龙. 磁悬浮系统自适应控制方法研究[J]. 电力机车与城轨车辆, 2005, 28 (6): 5-7. https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI200506001.htmZHANG Yi, HU Ji-shi, JIANG Qi-long. Self-adaptive control method for maglev system[J]. Electric Locomotives and Mass Transit Vehicles, 2005, 28 (6): 5-7. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI200506001.htm [16] 佘龙华, 柳贵东. 单铁磁悬浮控制系统的动力学特性研究[J]. 电力机车与城轨车辆, 2006, 29 (3): 17-19. https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI200603003.htmSHE Long-hua, LIU Gui-dong. Research on dynamics characteristic of single magnetic levitation control system[J]. Electric Locomotives and Mass Transit Vehicles, 2006, 29 (3): 17-19. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DJJI200603003.htm [17] MEISINGER R. Control systems for flexible maglev vehicles riding over flexible guideways[J]. Vehicle System Dynamics, 1975, 4 (2/3): 200-202. -

 下载:
下载:



 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 666
- HTML全文浏览量: 151
- PDF下载量: 679
- 被引次数: 0
