

Wheel-rail contact features of self-steering radial bogie locomotive
Article Text (Baidu Translation)
-
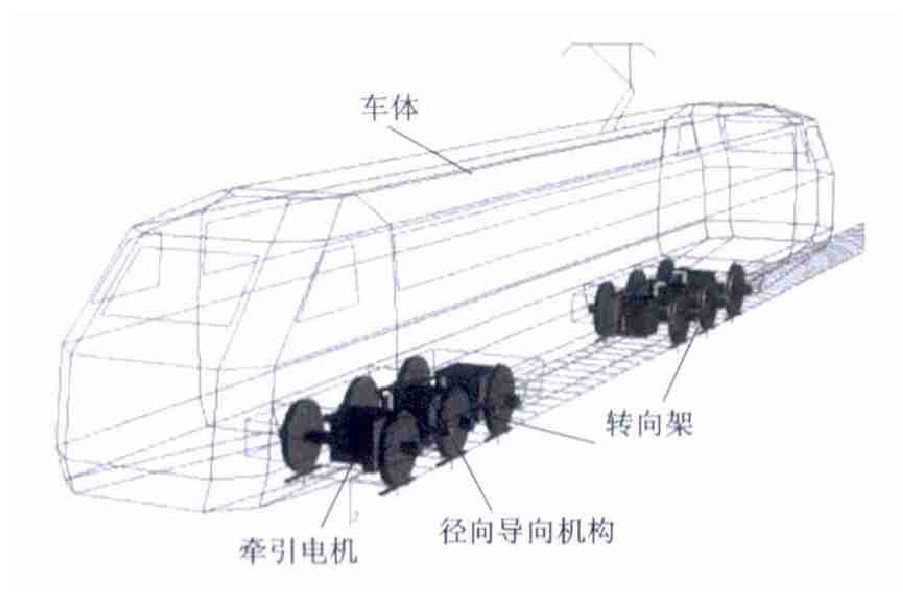
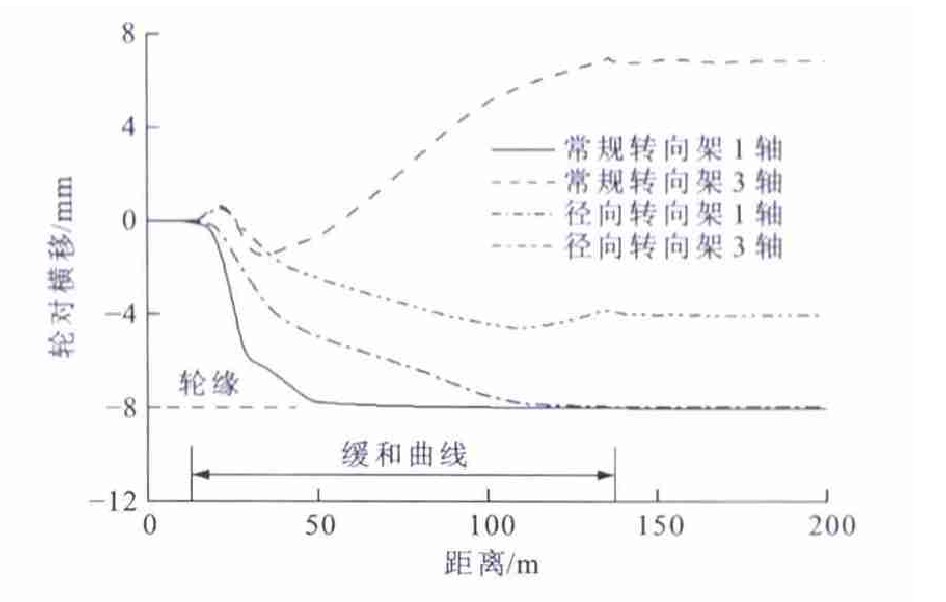
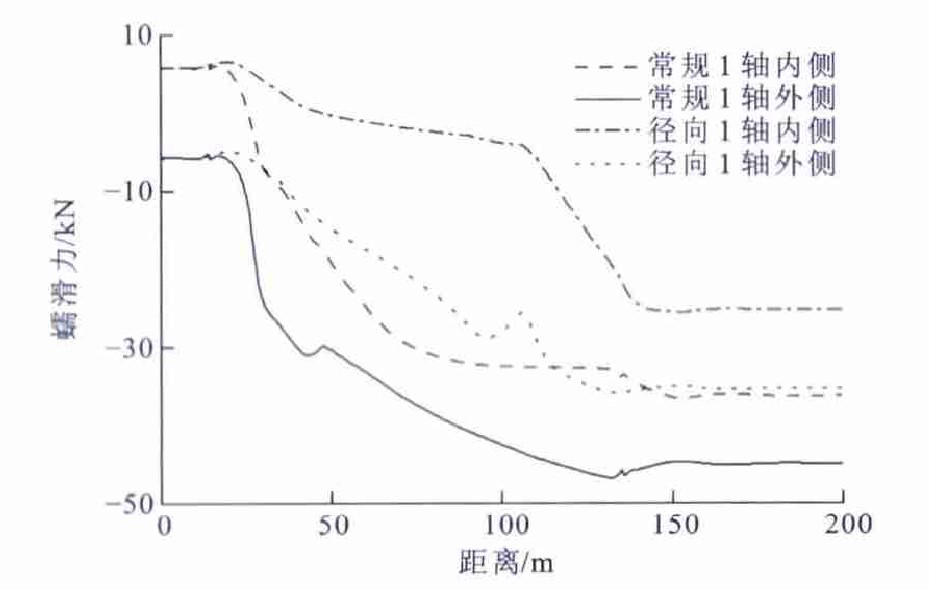
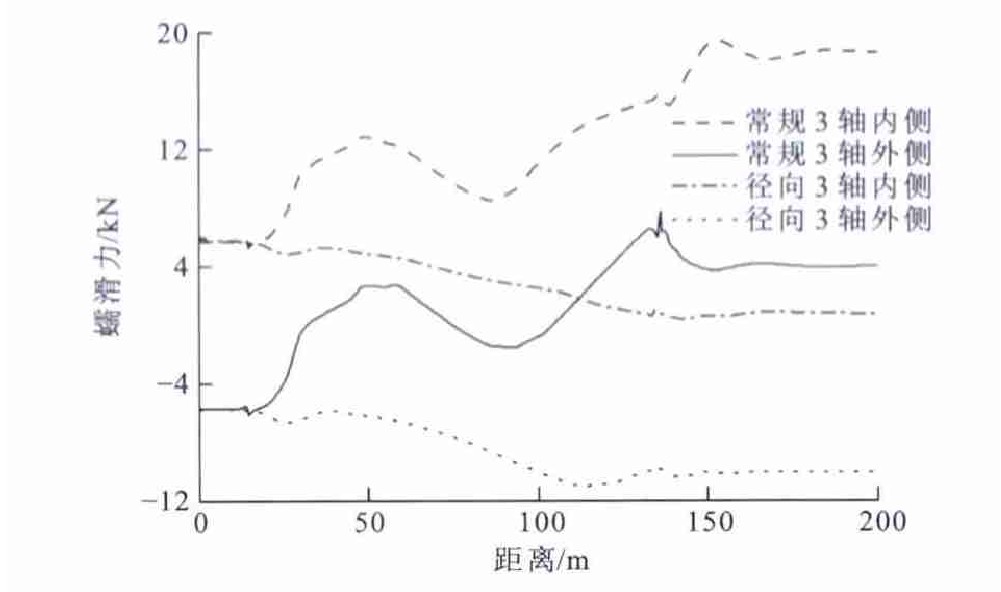
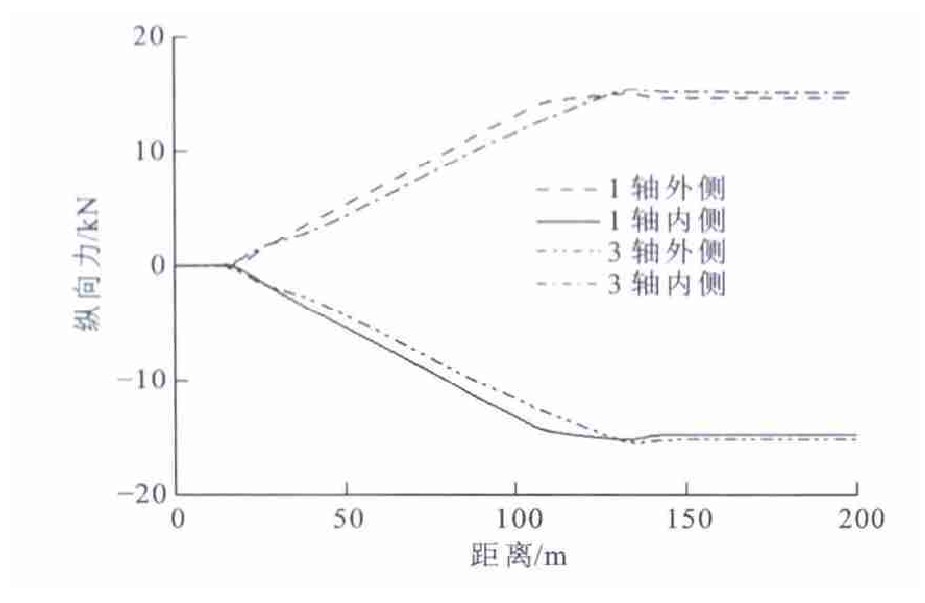
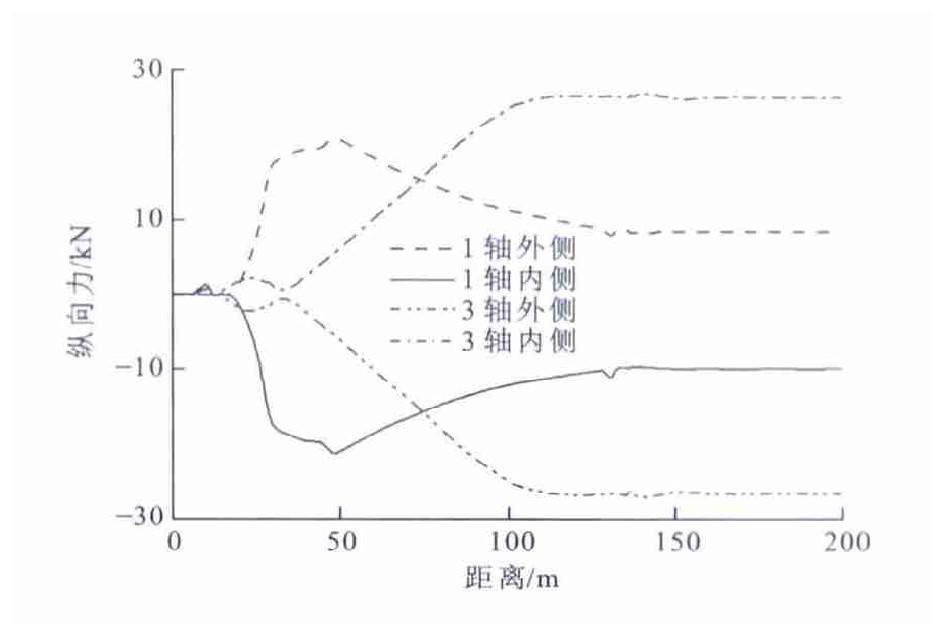
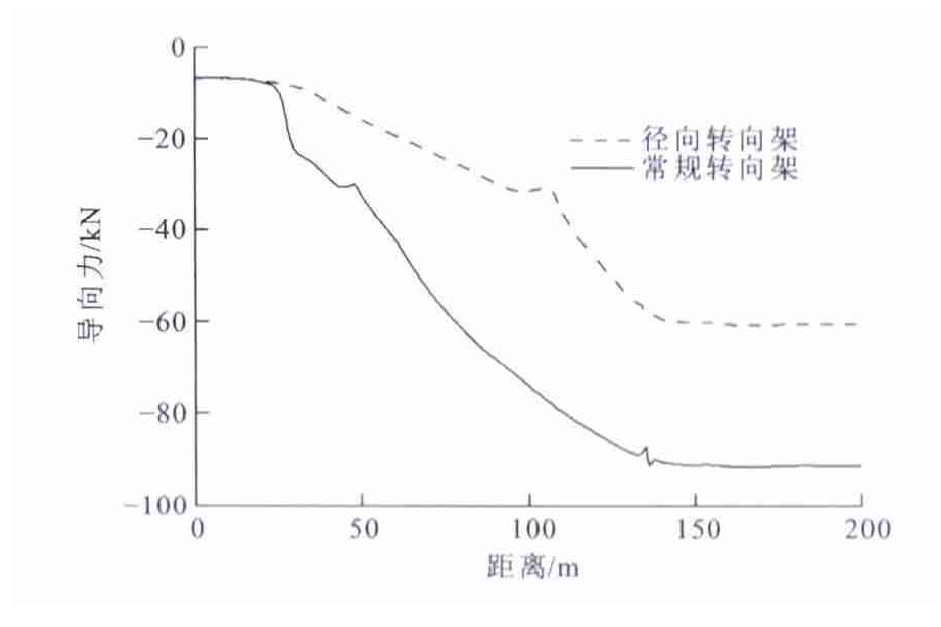
摘要: 研究了三轴机车径向导向机构工作原理, 采用数值仿真的方法分析了机车径向转向架和常规转向架通过缓和曲线时轮轨接触特性。研究结果表明: 径向机构能够均衡前后轮对的导向力矩, 改善机车一系悬挂的受力, 有利于转向架构架向曲线径向方向摇头; 常规转向架导向轮对易发生轮缘贴靠, 产生较大冲角, 而径向转向架轮对能够在较大半径下维持较小的冲角, 导向轮对发生轮缘贴靠以后会削弱径向转向架的导向性能; 两种转向架轮对的蠕滑力分布规律一致, 导向轮对横向蠕滑力大于纵向蠕滑力, 第3轮对纵向蠕滑力大于横向蠕滑力; 横向蠕滑力的变化过程表现出强的非线性规律, 较小的冲角就会产生较大的横向蠕滑力。Abstract: The working principle of radial steering structure for three axle locomotive was studied.Wheel-rail contact features of locomotives with radial bogie and conventional bogie during passing transition curve were analyzed in detail by using the numerical simulation method.It is concluded that radial structure can balance the steering torques between wheelsets and improve locomotive primary suspension force to promote the bogie frame moving along the radial direction.The guide wheelset of conventional bogie is more susceptible to flange contact, which leads to a greater angle of attack.The guide wheelset in the radial bogie can maintain a smaller angle of attack on a large radius curve.When the flange contact occurs on the guide wheelset, the steering ability of radial bogie is weakened.The creep force distributions are almost same for the two types of bogies, i.e.the lateral creep force is greater than the longitudinal creep force for the guide wheelset, but the longitudinal creep force is greater than the lateral creep force for the third wheelset.The change of lateral creep force shows strongly nonlinear characteristic that smaller angle can cause larger lateral creep force.
-
Key words:
- locomotive engineeing /
- radial bogie /
- dynamics analysis /
- curve negotiation /
- wheel-rail contact /
- creep force /
- flange contact
-
[1] 李霞, 温泽峰, 张剑, 等. 轨底坡对轮轨滚动接触行为的影响[J]. 机械强度, 2009, 31 (3): 475-480. doi: 10.3321/j.issn:1001-9669.2009.03.026LI Xia, WEN Ze-feng, ZHANG Jian, et al. Effect of rail cant on wheel/rail rolling contact behavior[J]. Journal of Mechanical Strength, 2009, 31 (3): 475-480. (in Chinese). doi: 10.3321/j.issn:1001-9669.2009.03.026 [2] SATO E, KOBAYASHI H, TEZUKA K, et al. Lateral force during curve negotiation of forced steering bogies[J]. Quarterly Report of RTRI, 2003, 44 (1): 8-14. doi: 10.2219/rtriqr.44.8 [3] WICKENS A H, GOODALL R M, LI J. Re-evaluation of the limitations of the railway wheelset: passive and active[J]. Vehicle System Dynamics, 2006, 44 (S1): 14-23. [4] 李芾, 傅茂海, 黄运华. 径向转向架机理及其动力学特性研究[J]. 中国铁道科学, 2002, 23 (5): 46-51. doi: 10.3321/j.issn:1001-4632.2002.05.009LI Fu, FU Mao-hai, HUANG Yun-hua. Research of principle and dynamic characteristics of radial bogies[J]. China Railway Science, 2002, 23 (5): 46-51. (in Chinese). doi: 10.3321/j.issn:1001-4632.2002.05.009 [5] AHMADIAN M, HUANG Wei. A qualitative analysis of the dynamics of self-steering locomotive trucks[J]. Vehicle System Dynamics, 2002, 37 (2): 85-127. doi: 10.1076/vesd.37.2.85.3537 [6] POLACH O. Curving and stability optimisation of locomotive bogies using interconnected wheelsets[J]. Vehicle System Dynamics, 2004, 41 (S): 53-62. [7] SIMSON S, COLE C. Idealized steering for hauling locomotives[J]. Porceedings of the Institute of Mechanical Engineers Part F: Journal of Rail and Rapid Transit, 2007, 221 (2): 227-236. doi: 10.1243/0954409JRRT102 [8] 李亨利, 李芾, 傅茂海, 等. 曲线几何参数对货车转向架曲线通过性能的影响[J]. 中国铁道科学, 2008, 29 (1): 70-75. doi: 10.3321/j.issn:1001-4632.2008.01.015LI Heng-li, LI Fu, FU Mao-hai, et al. Influence of curve geometric parameters on the curve negotiation performance of freight car bogies[J]. China Railway Science, 2008, 29 (1): 70-75. (in Chinese). doi: 10.3321/j.issn:1001-4632.2008.01.015 [9] 杨春雷, 李芾, 付茂海, 等. 25t轴载外径向臂径向转向架动力学分析[J]. 交通运输工程学报, 2010, 10 (5): 30-37. doi: 10.3969/j.issn.1671-1637.2010.05.006YANG Chun-lei, LI Fu, FU Mao-hai, et al. Dynamics analysis of 25taxle load steering bogie with radial arm[J]. Journal of Traffic and Transportation Engineering, 2010, 10 (5): 30-37. (in Chinese). doi: 10.3969/j.issn.1671-1637.2010.05.006 [10] SIMSON S, COLE C. Parametric simulation study of traction curving of three axle steering bogie designs[J]. Vehicle System Dynamics, 2008, 46 (S): 717-728. [11] 王开云, 翟婉明, 封全保. 机车牵引状态下曲线通过导向特性研究[J]. 中国铁道科学, 2006, 27 (2): 71-76. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200602014.htmWANG Kai-yun, ZHAI Wan-ming, FENG Quan-bao. Study on the steering characteristics of curve negotiation under locomotive traction[J]. China Railway Science, 2006, 27 (2): 71-76. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK200602014.htm [12] 金学松, 温泽峰, 张卫华. 轮对运动状态对轮轨滚动接触应力的影响[J]. 工程力学, 2004, 21 (1): 165-173. doi: 10.3969/j.issn.1000-4750.2004.01.031JIN Xue-song, WEN Ze-feng, ZHANG Wei-hua. Effect of wheelset motions on the rolling contact stresses of wheel and rail[J]. Engineering Mechanics, 2004, 21 (1): 165-173. (in Chinese). doi: 10.3969/j.issn.1000-4750.2004.01.031 [13] 温泽峰, 金学松. 两种型面轮轨滚动接触蠕滑率/力的比较[J]. 工程力学, 2002, 19 (3): 82-89. https://www.cnki.com.cn/Article/CJFDTOTAL-GCLX200203016.htmWEN Ze-feng, JIN Xue-song. Two types of profiles in rolling contact[J]. Engineering Mechanics, 2002, 19 (3): 82-89. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GCLX200203016.htm [14] 申鹏, 宋建华, 李自彬, 等. 轮轨黏着特性试验研究[J]. 润滑与密封, 2009, 34 (7): 10-13, 32. https://www.cnki.com.cn/Article/CJFDTOTAL-RHMF200907005.htmSHEN Peng, SONG Jian-hua, LI Zi-bin, et al. Experimental investigation on wheel/rail adhesion characteristic[J]. Lubrication Engineering, 2009, 34 (7): 10-13, 32. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-RHMF200907005.htm -

 下载:
下载:




 点击查看大图
点击查看大图

图(13)
计量
- 文章访问数: 935
- HTML全文浏览量: 263
- PDF下载量: 1118
- 被引次数: 0
