

ANP estimation algorithm of onboard navigation system based on numerical integration
Article Text (Baidu Translation)
-
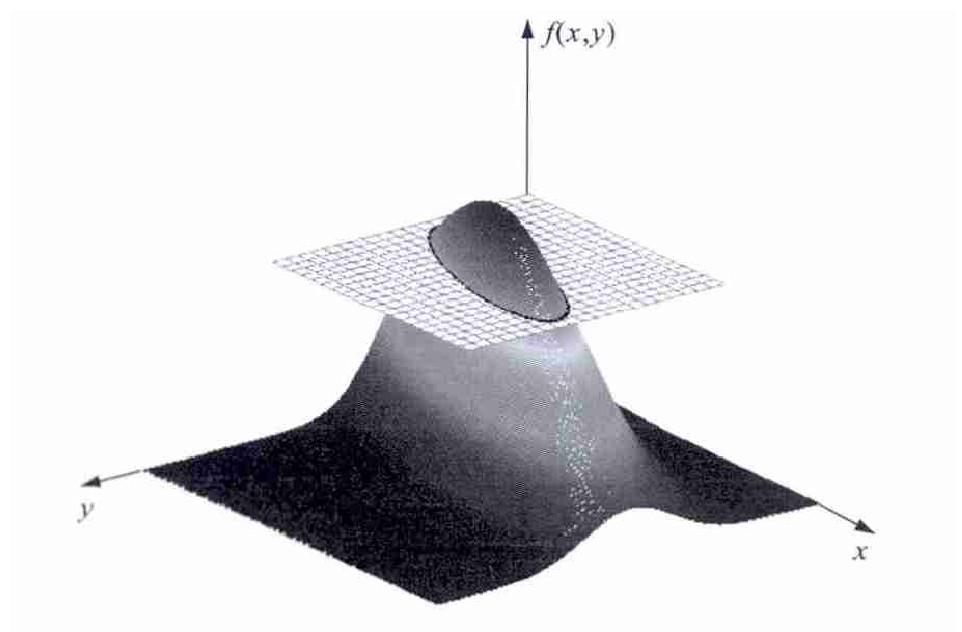
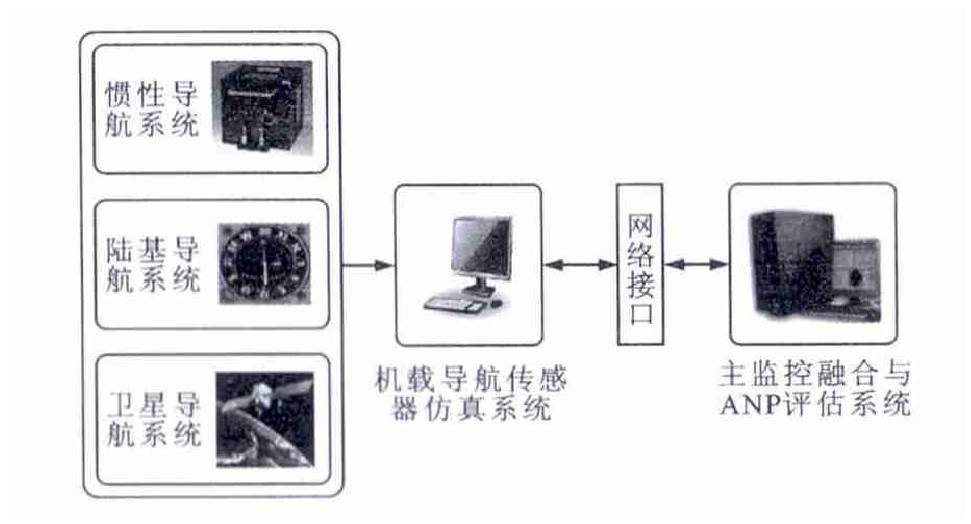
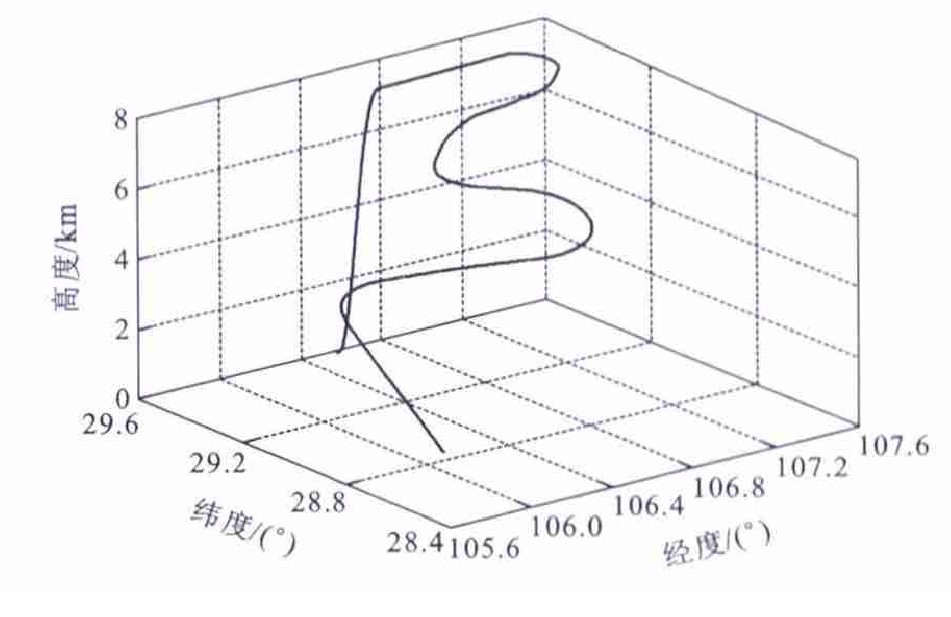
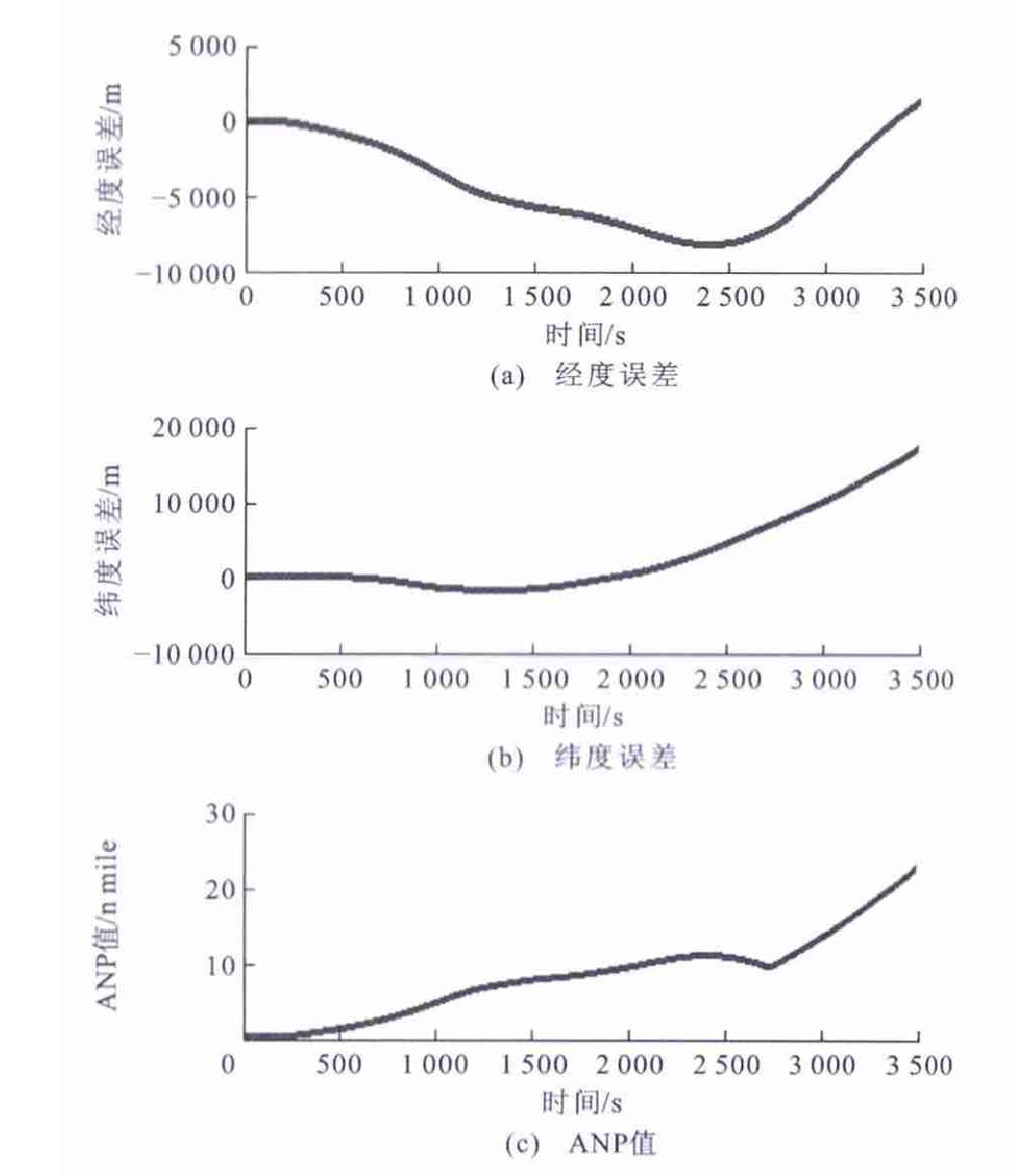
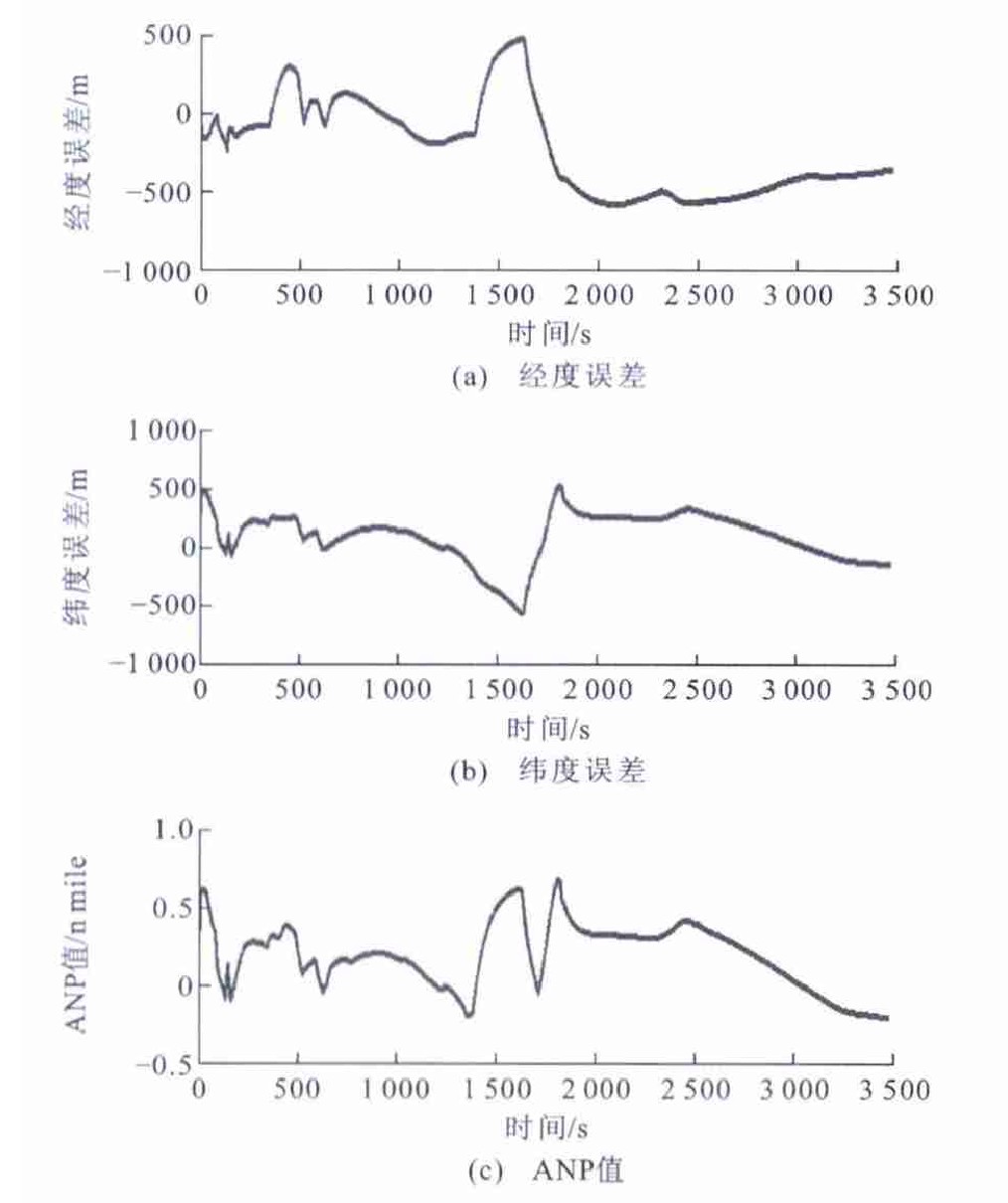
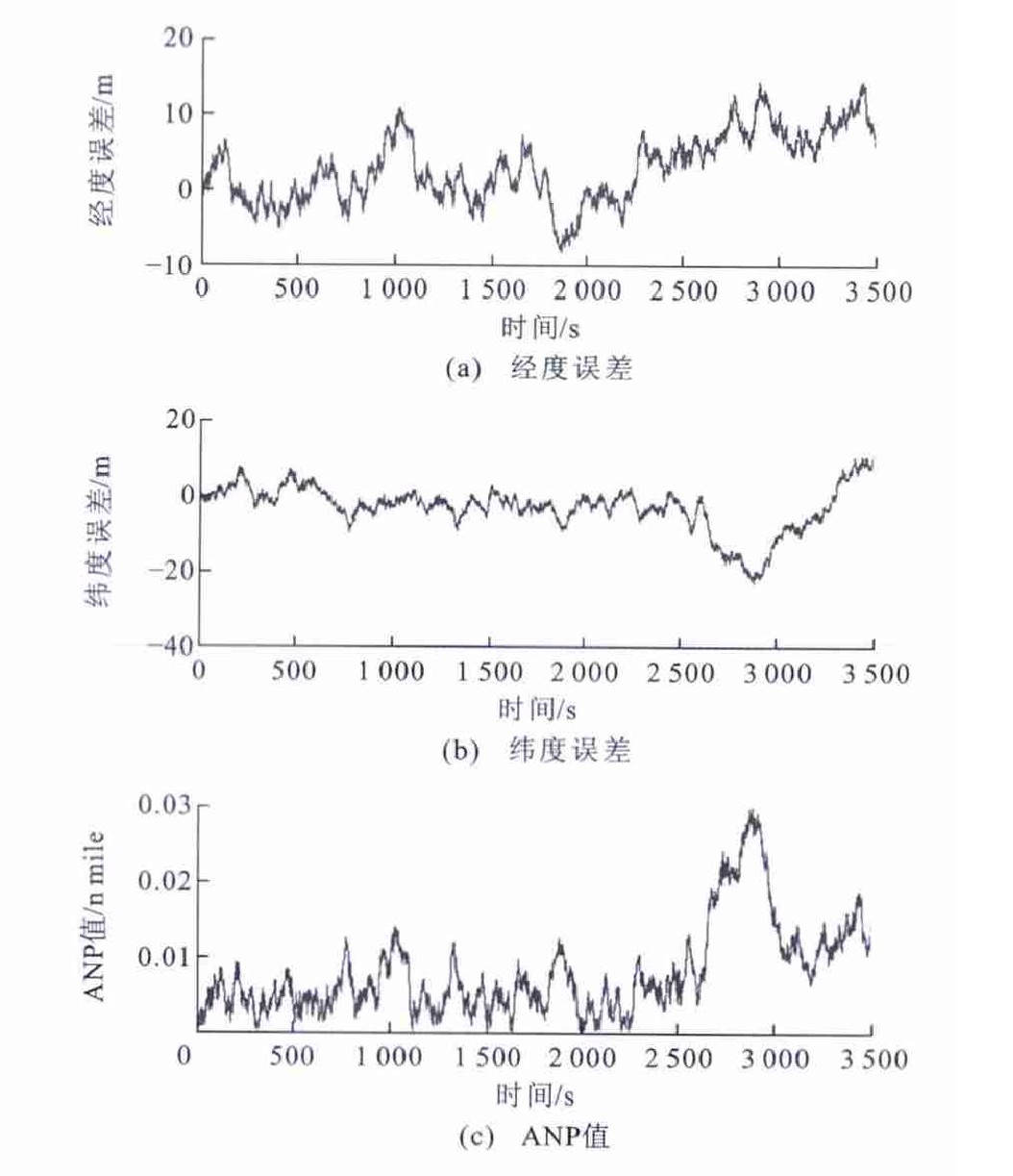
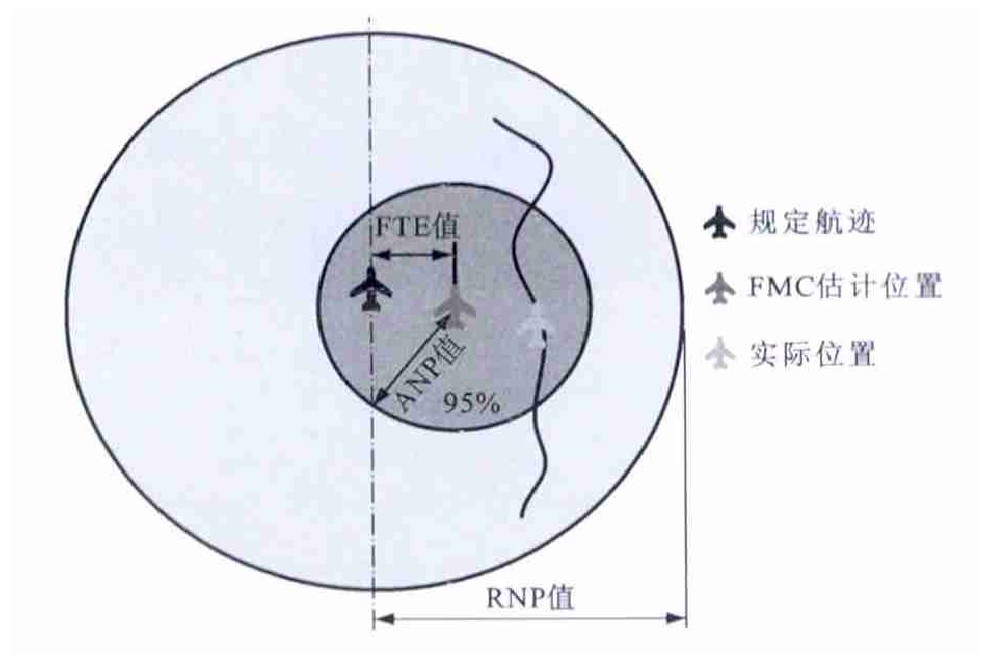
摘要: 为了准确评估飞机的实际导航性能, 确保飞行安全, 研究了基于性能导航运行方式下的机载综合导航系统的位置误差二维正态分布特性, 建立了ANP评估中飞机估计位置的误差模型, 推导了其概率误差圆的数值积分, 并提出了一种基于导航误差数值积分的机载综合导航系统ANP实时评估算法。以大型客机的典型综合导航方式为例, 对评估算法进行了仿真验证。仿真结果表明: ANP值能有效达到95%的误差估算精度, 算法能可靠地评估组合导航系统的实时误差特性, 具有较高的实际导航性能评估精度, 是一种切实有效的方法。Abstract: In order to accurately estimate the actual navigation performance (ANP) of plane and ensure the safety of flight, the two-dimensional normal distribution characteristic of position error for onboard integrated navigation system was studied based on the operation mode of performance based navigation (PBN).An error model of plane's estimated position in the estimation of ANP was established.The numerical integration of the probability of error circle was derived.An ANP real-time estimation algorithm of onboard integrated navigation system was proposed based on the numerical integration of navigation error.Then a simulation of the estimation algorithm was carried out based on a typical integrated navigation mode of an airliner.Simulation result indicates that the ANP value can effectively make the accuracy of error estimation reach 95%.The algorithm can estimate the real-time error characteristics of integrated navigation system authentically, has high ANP assessment precision for actual navigation performance, and is a kind of effective method.
-
[1] International Civil Aviation Organization. Performance based navigation manual[R]. Montreal: International Civil Aviation Organization, 2008. [2] 黄卫芳. 浅谈基于性能导航(PBN)[J]. 空中交通管理, 2007 (7): 10-16. https://www.cnki.com.cn/Article/CJFDTOTAL-XDDH201301004.htmHUANG Wei-fang. Performance based navigation[J]. Air Traffic Management, 2007 (7): 10-16. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDDH201301004.htm [3] ECKSTEIN A. Automated flight track taxonomy for measuring benefits from performance based navigation[C]∥IEEE. Proceedings of the 2009Integrated Communications, Navigation and Surveillance Conference. Crystal City: IEEE, 2009: 1-12. [4] 吕小平. RNP/RNAV技术应用的效益分析[J]. 中国民用航空, 2008 (88): 42-44. https://www.cnki.com.cn/Article/CJFDTOTAL-MHJJ200804024.htmLU Xiao-ping. Benefit analysis of RNP/RNAV application[J]. China Civil Aviation, 2008 (88): 42-44. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MHJJ200804024.htm [5] 倪育德, 肖山. RNAV和RNP技术研究[J]. 中国民用航空, 2010 (112): 63-65. https://www.cnki.com.cn/Article/CJFDTOTAL-MHJJ201004024.htmNI Yu-de, XIAO Shan. The research on RNAV and RNP technologies[J]. China Civil Aviation, 2010 (112): 63-65. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MHJJ201004024.htm [6] JING Lin-lin, ZHANG Xue-jun. Lateral separation minima analysis based on required navigation performance[C]∥IEEE. 2010IEEE International Conference on Computer Science and Information Technology. Chengdu: IEEE, 2010: 144-148. [7] 彭仲仁, 刘晓锋, 张立业, 等. 无人飞机在交通信息采集中的研究进展和展望[J]. 交通运输工程学报, 2012, 12 (6): 119-126. doi: 10.3969/j.issn.1671-1637.2012.06.018PENG Zhong-ren, LIU Xiao-feng, ZHANG Li-ye, et al. Research progress and prospect of UAV applications in transportation information collection[J]. Journal of Traffic and Transportation Engineering, 2012, 12 (6): 119-126. (in Chinese). doi: 10.3969/j.issn.1671-1637.2012.06.018 [8] 王志学, 李晔. 基于RNP AR进近程序的最后进近航段分析[J]. 中国民航大学学报, 2012, 30 (5): 19-22, 33. doi: 10.3969/j.issn.1674-5590.2012.05.005WANG Zhi-xue, LI Ye. Analysis of final approach segment based on RNP AR approach[J]. Journal of Civil Aviation University of China, 2012, 30 (5): 19-22, 33. (in Chinese). doi: 10.3969/j.issn.1674-5590.2012.05.005 [9] 沈笑云, 赵瑞, 焦卫东, 等. 基于World Wind的RNP飞行程序三维可视化仿真[J]. 系统仿真学报, 2012, 24 (10): 2131-2135. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201210021.htmSHEN Xiao-yun, ZHAO Rui, JIAO Wei-dong, et al. 3Dvisualization simulation of RNP flight procedure based on World Wind[J]. Journal of System Simulation, 2012, 24 (10): 2131-2135. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201210021.htm [10] BALLIN M G, WILLIAMS D H, ALLEN B D, et al. Prototype flight management capabilities to explore temporal RNP concepts[C]∥IEEE. 27th IEEE Digital Avionics Systems Conference. Saint Paul: IEEE, 2008: 26-32. [11] MCDONALD J, KENDRICK J. Benefits of tightly coupled GPS/IRS for RNP operations in terrain challenged airports[C]∥IEEE. 2008IEEE/ION Position Location and Navigation Symposium. Washington DC: IEEE, 2008: 294-303. [12] 孙淑光, 戴博, 张鹏. 机载组合导航系统实际导航性能计算方法[J]. 控制工程, 2011, 18 (2): 262-266. doi: 10.3969/j.issn.1671-7848.2011.02.026SUN Shu-guang, DAI Bo, ZHANG Peng. Actual navigation performance calculation of onboard integrated navigation system[J]. Control Engineering of China, 2011, 18 (2): 262-266. (in Chinese). doi: 10.3969/j.issn.1671-7848.2011.02.026 [13] 张建华. 气压垂直导航安全性分析[J]. 空中交通管理, 2011 (2): 11-13, 16.ZHANG Jian-hua. Analysis of baro VNAV safety[J]. Air Traffic Management, 2011 (2): 11-13, 16. (in Chinese). [14] KLEIN K A, SHEPLEY J P. An analysis of automation for monitoring area navigation (RNAV) and required navigation performance (RNP) terminal operations[C]∥IEEE. 27th IEEE Digital Avionics Systems Conference. Saint Paul: IEEE, 2008: 2-12. [15] ZHAO Hong-sheng, XU Xiao-hao, ZHANG Jun, et al. Lateral flight technical error estimation model for performance based navigation[J]. Chinese Journal of Aeronautics, 2011, 24 (3): 329-336. [16] DONG Bing, LUO Xiao-li. Analysis of assessment method about the flight technical error based on Johnson curves[J]. Procedia Engineering, 2011, 17: 84-89. -

 下载:
下载:




 点击查看大图
点击查看大图
图(9) / 表(2)
计量
- 文章访问数: 579
- HTML全文浏览量: 128
- PDF下载量: 1509
- 被引次数: 0
