

Measurement method of vehicle yaw rate with smartphone
Article Text (Baidu Translation)
-
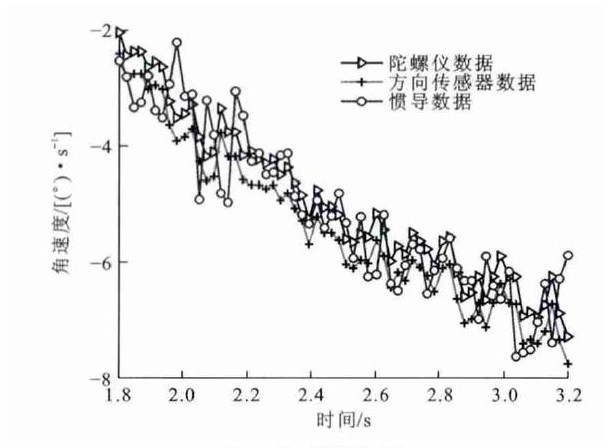
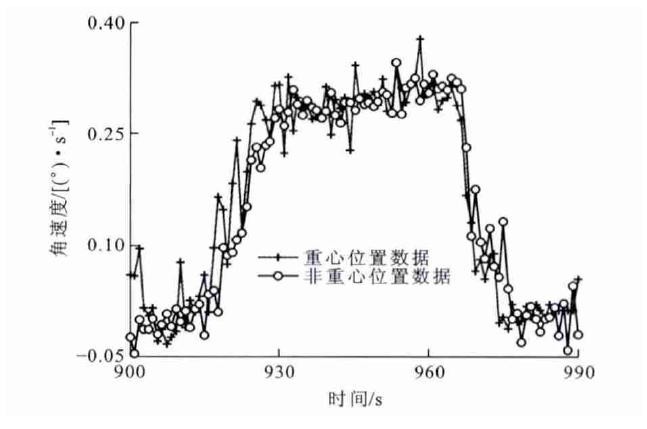
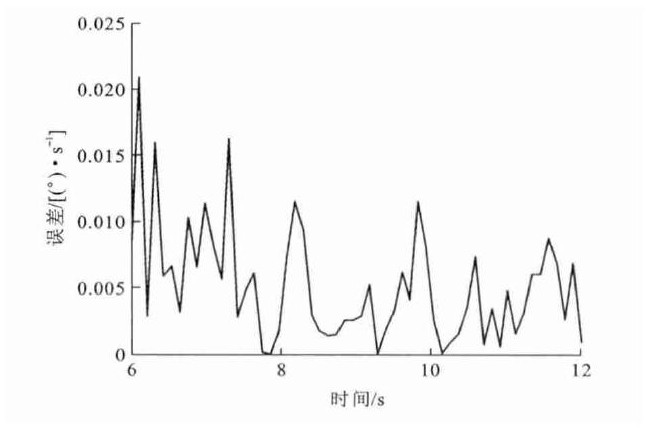
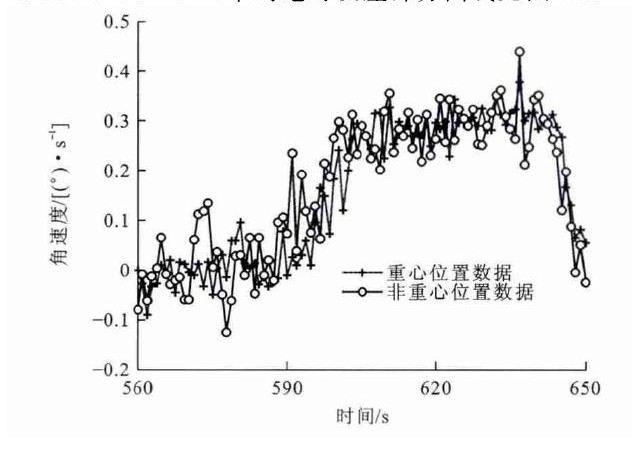
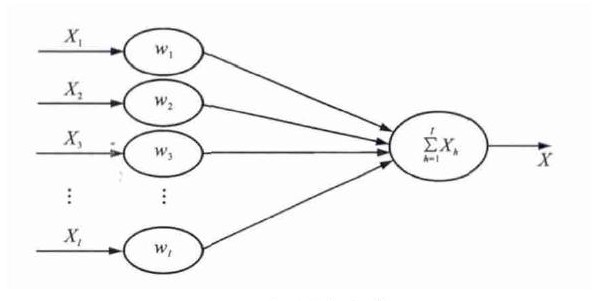
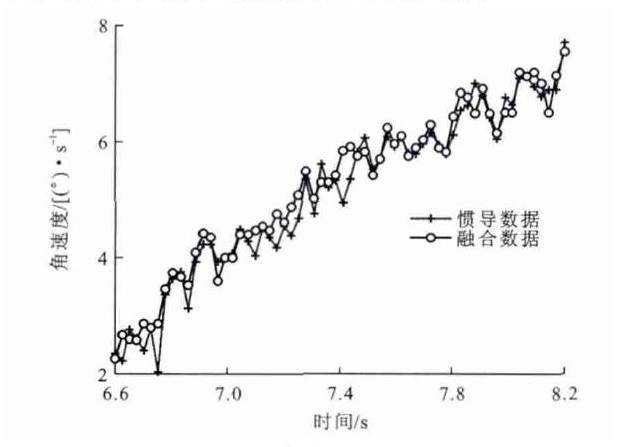
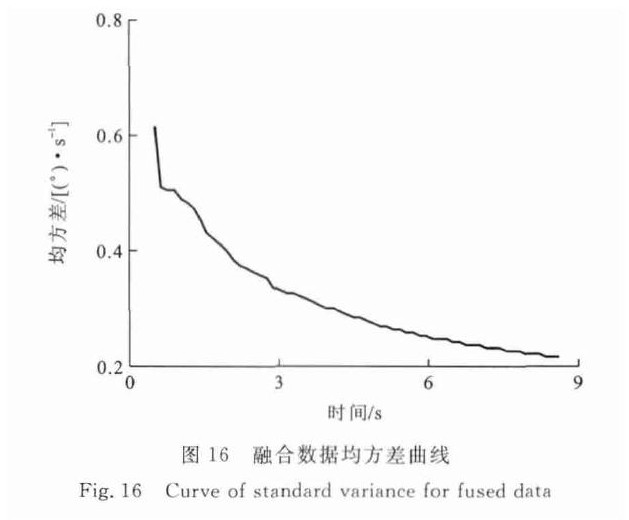
摘要: 使用智能手机和高精度惯导设备测量了车辆横摆角速度, 分析了手机放置位置对测量精度的影响。针对智能手机的测量误差, 采用自适应加权融合算法对智能手机中陀螺仪和方向传感器的测量数据进行融合修正。根据多元函数极值理论求出2个传感器的最优加权因子, 加权求和得到最优的横摆角速度。分析结果表明: 智能手机的放置位置对车辆横摆角速度测量精度影响很小, 重心位置与非重心位置上的手机陀螺仪和方向传感器测量结果最大相对误差分别为0.739 7%和0.923 8%。融合修正后的数据与高精度惯导设备数据相比, 平均绝对误差为0.607 7 (°) ·s-1, 相比陀螺仪和方向传感器平均绝对误差分别降低了34.3%和50.0%。融合后的数据均方差随测量次数增加呈下降趋势, 并快速收敛, 收敛时间约为6s。Abstract: Vehicle yaw rates were measured by smartphone and high-precision inertial navigation system (INS). The influence of smartphone places on the measurement accuracy of yaw rate was analyzed. A self-adaptive weighted fusion algorithm was applied to reduce the measurement error of built-in gyroscope and orientation sensor of smartphone. The extreme value theory of multivariable function was used to obtain the optimal weighting factors of two sensors. The best value of yaw rate was calculated by weighted summation. Analysis result indicates that the impact of smartphone position on the measurement accuracy is very small. When smartphone is not fixed at center of gravity, the maximal relative errors of yaw rates measured by two sensors of smartphone are 0.739 7% and 0.923 8%, respectively. Average absolute error between fused data and INS data is 0.607 7 (°) ·s-1. Compared with the data measured by two sensors of smartphone, the average absolute error reduces by 34.3% and 50.0%, respectively. The variance of fused data declines and rapidly converges as the number of measurement increases. The convergent time is about 6 s.
-
Key words:
- automotive engineering /
- vehicle yaw rate /
- smartphone /
- data fusion /
- self-adaptive weighted algorithm
-

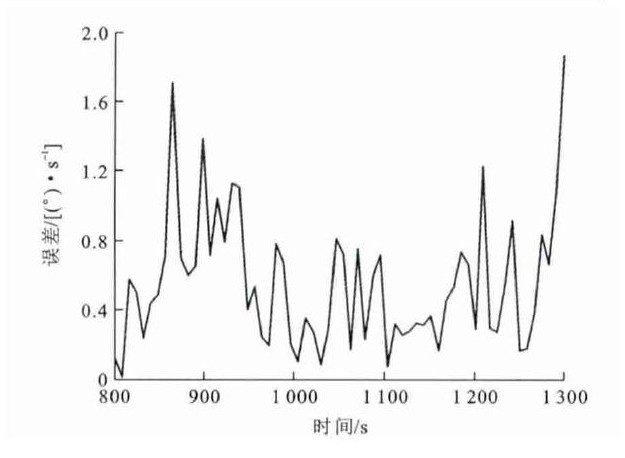
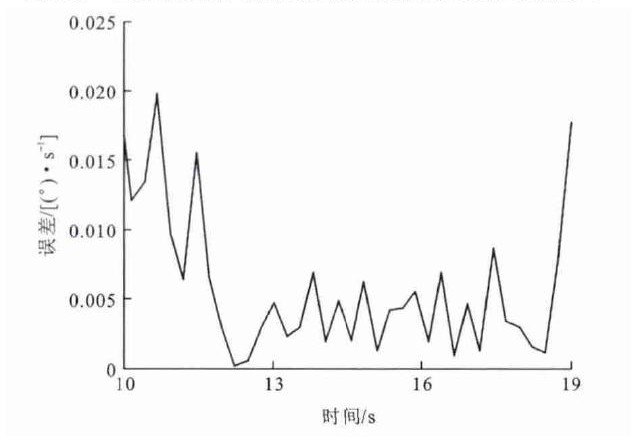
图 12 位置2方向传感器测量误差曲线
Figure 12. Measurement error curve of orientation sensor at location 2
-
[1] CHEE W. Yaw rate estimation using two 1-axis accelerometers[C]//IEEE. 2005American Control Conference. Portland: IEEE, 2005: 423-428. [2] ZHAO Hai-yan, CHEN Hong. Estimation of vehicle yaw rate and side slip angle using moving horizon strategy[C]//IEEE. Proceedings of the 6th World Congress on Intelligent Control and Automation. Dalian: IEEE, 2006: 1828-1832. [3] GHONEIM Y A, CHIN Y K. Active brake control having yaw rate estimation: America, US 6169951B1[P]. 2001-01-02. [4] KENSUKE F. Yaw rate estimating apparatus: America, US6366833B1[P]. 2002-04-02. [5] SCHIFFMANN J K. Vehicle rollover sensing using yaw rate estimation: America, US 6192305B1[P]. 2001-02-20. [6] HAC A, SIMPSON M D. Estimation of vehicle side slip angle and yaw rate[C]//SAE. SAE 2000 World Congress. Detroit: SAE, 2000: 1-7. [7] KOUSAKU S, YOZO N, HAYATO S, et al. Angular rate detection apparatus, acceleration detection apparatus and movement control apparatus of moving body: America, US 5247466B1[P]. 1993-09-21. [8] CHEE W. Method and apparatus for estimating yaw rate in a wheeled vehicle and stability system: America, US 0078700A1[P]. 2003-04-23. [9] GAO Zhen-hai. Soft sensor application in vehicle yaw rate measurement based on Kalman filter and vehicle dynamics[C]//IEEE. 2003IEEE Conference on Intelligent Transportation Systems Proceeding. Minchgan: IEEE, 2003: 1352-1354. [10] ZHU Tian-jun, ZHENG Hong-yan. Application of unscented Kalman filter to vehicle state estimation[C]//IEEE. 2008 ISECS International Colloquium on Computing, Communication, Control, and Management. Guangzhou: IEEE, 2008: 135-139. [11] 高越, 高振海, 李向瑜. 基于自适应Kalman滤波的汽车横摆角速度软测量算法[J]. 江苏大学学报: 自然科学版, 2005, 26 (1): 24-27. https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG200501009.htmGAO Yue, GAO Zhen-hai, LI Xiang-yu. Soft measurement method for vehicle yaw rate based on adaptive Kalman filter[J]. Journal of Jiangsu University: Natural Science Edition, 2005, 26 (1): 24-27. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSLG200501009.htm [12] KIENCKE U, DAIβA. Observation of lateral vehicle dynamics[J]. Control Engineering Practice, 1997, 5 (8): 1145-1150. doi: 10.1016/S0967-0661(97)00108-1 [13] EDWARDS C, HEBDEN R G, SPURGEON S K. Sliding mode observers for vehicle model detection[J]. Vehicle System Dynamics, 2005, 43 (11): 823-843. doi: 10.1080/00423110500225855 [14] 樊娜, 赵祥模, 王青龙. 船联网数据融合的信任模型[J]. 交通运输工程学报, 2013, 13 (3): 121-126. http://transport.chd.edu.cn/article/id/201303017FAN Na, ZHAO Xiang-mo, WANG Qing-long. Trust model of data fusion for internet of ships[J]. Journal of Traffic and Transportation Engineering, 2013, 13 (3): 121-126. (in Chinese). http://transport.chd.edu.cn/article/id/201303017 [15] 姜桂艳, 李琦, 常安德. 数据融合技术在交通事件检测中的应用综述[J]. 交通信息与安全, 2011, 29 (3): 138-144. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201103032.htmJIANG Gui-yan, LI Qi, CHANG An-de. A review of application of data fusion technology in the field of traffic incident detection[J]. Journal of Transport Information and Safety, 2011, 29 (3): 138-144. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201103032.htm [16] 陈扶崑, 吴中, 田亮. 基于多源信息融合的高速公路事件检测算法研究[J]. 交通信息与安全, 2009, 27 (1): 35-38. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200901010.htmCHEN Fu-kun, WU Zhong, TIAN Liang. Freeway incident detection algorithm based on multi-source information fusion[J]. Journal of Transport Information and Safety, 2009, 27 (1): 35-38. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200901010.htm [17] LUO R C, LIN M H, SCHERP R S. Dynamic multisensor data fusion system for intelligent robots[J]. IEEE Journal of Robotics and Automation, 1988, 4 (4): 386-396. [18] 李战明, 陈若珠, 张保梅. 同类多传感器自适应加权估计的数据级融合算法研究[J]. 兰州理工大学学报, 2006, 32 (4): 78-82. https://www.cnki.com.cn/Article/CJFDTOTAL-GSGY200604020.htmLI Zhan-ming, CHEN Ruo-zhu, ZHANG Bao-mei. Study of adaptive weighted estimate algorithm of congeneric multisensor data fusion[J]. Journal of Lanzhou University of Technology, 2006, 32 (4): 78-82. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GSGY200604020.htm [19] 胡学俊, 罗中良. 基于统计理沦的多传感器信息融合方法[J]. 传感器技术, 2002, 21 (8): 38-39, 43. https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ200208012.htmHU Xue-jun, LUO Zhong-liang. Method of multi-sensor information fusion based on statistics theory[J]. Journal of Transducer Technology, 2002, 21 (8): 38-39, 43. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ200208012.htm [20] 费文. 多传感器自适应加权数据融合在测量排气温度的应用[J]. 国外电子测量技术, 2007, 26 (12): 4-6. https://www.cnki.com.cn/Article/CJFDTOTAL-GWCL200712003.htmFEI Wen. Multi-sensor self-adaptive weight added fusion method applied in testing exhaust temperature[J]. Foreign Electronic Measurement Technology, 2007, 26 (12): 4-6. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GWCL200712003.htm -

 下载:
下载:




 点击查看大图
点击查看大图

图(16) / 表(3)
计量
- 文章访问数: 698
- HTML全文浏览量: 175
- PDF下载量: 2474
- 被引次数: 0
