

Modeling and simulation of collaborative flight based on multi-agent technique
Article Text (Baidu Translation)
-
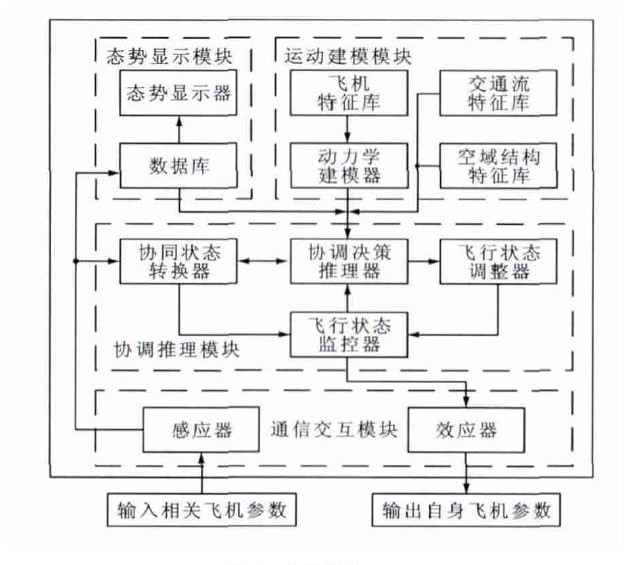
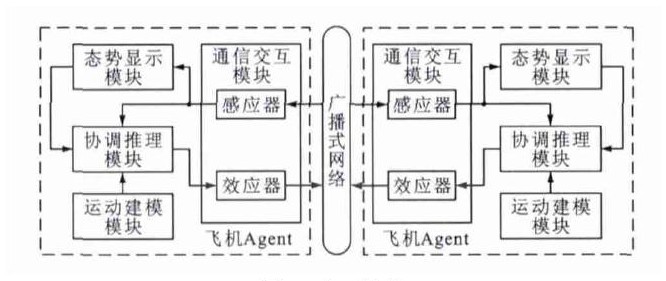
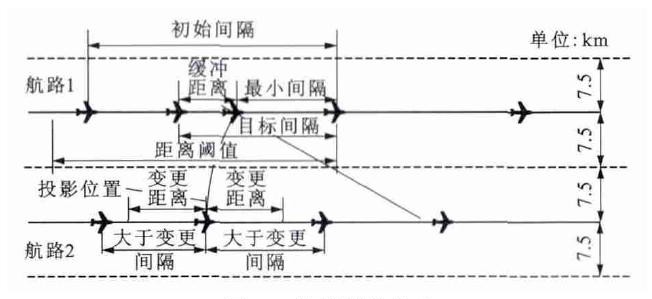
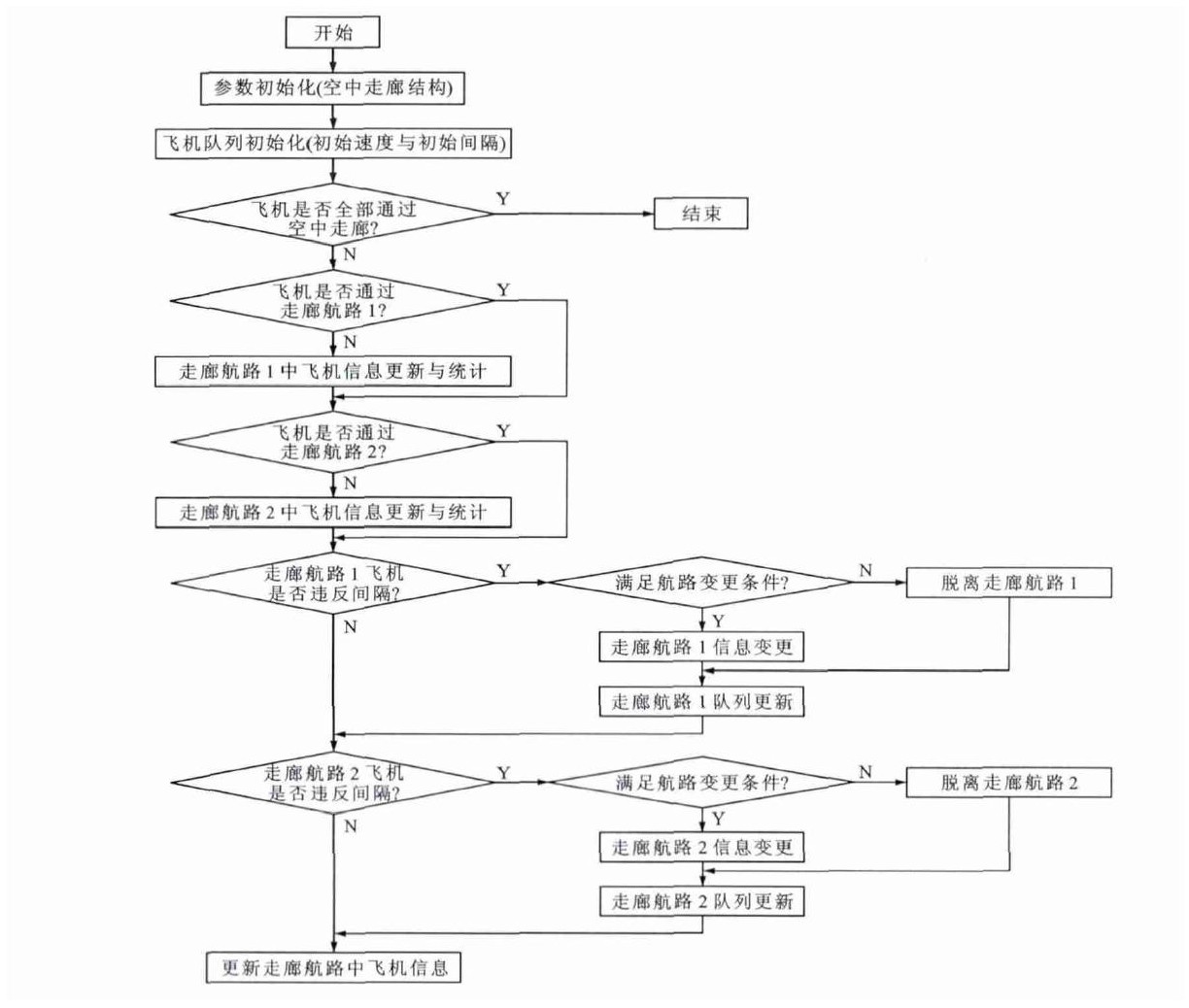
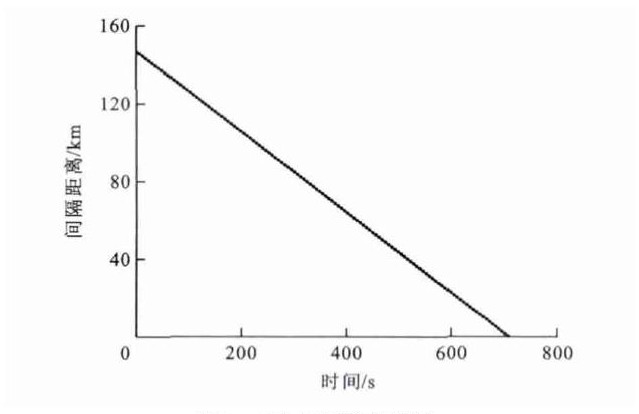
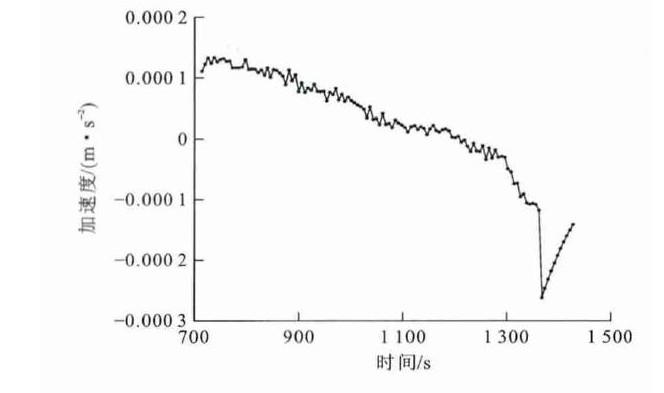
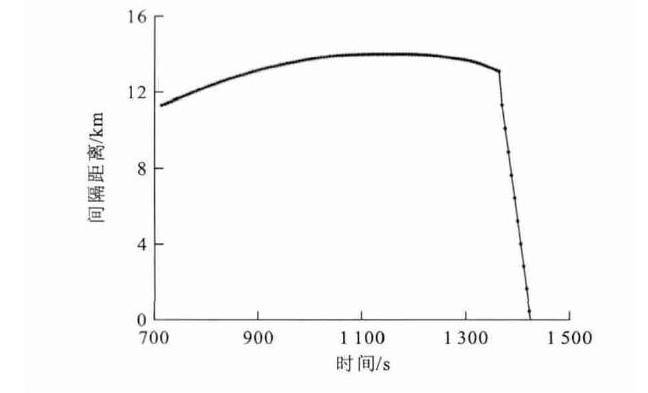
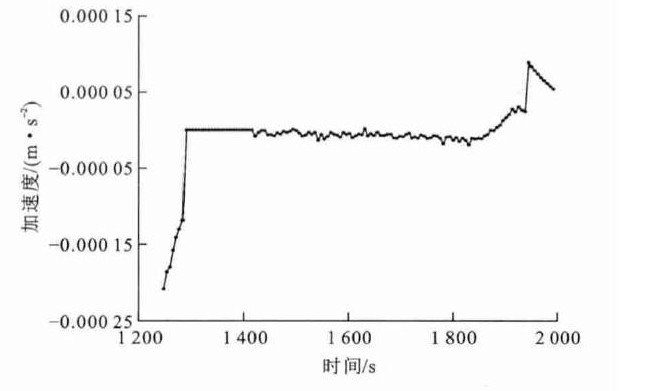
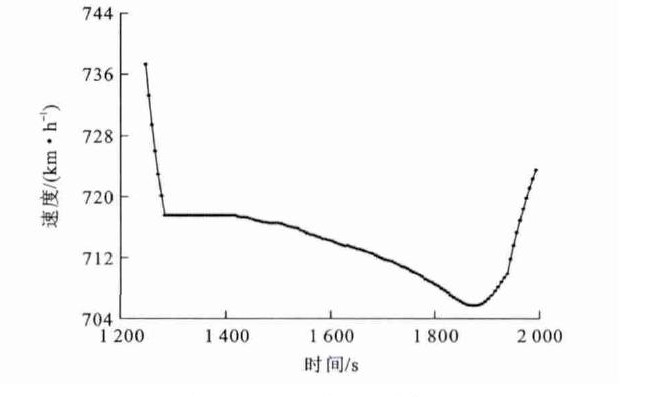
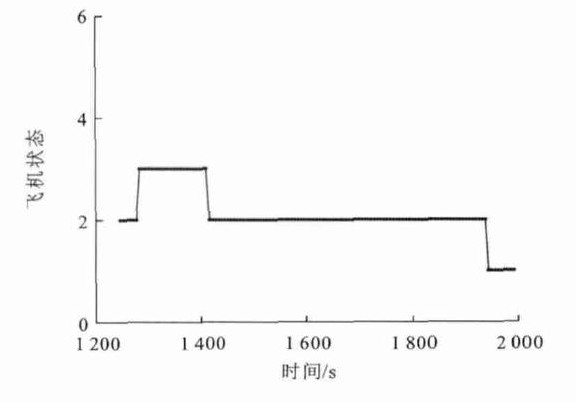
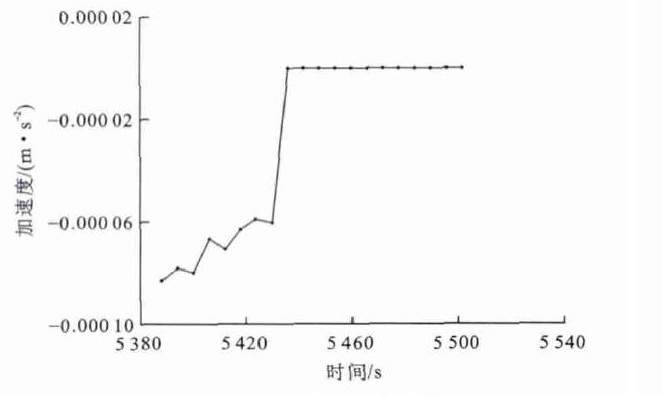
摘要: 应用多Agent建模与仿真技术, 研究了飞机Agent在空中走廊中的飞行风险。根据空中走廊内飞机Agent的飞行目标、主要功能和内部结构, 分析了飞机Agent的推理规则和协同状态, 提出了协同飞行的交互结构, 利用混合式仿真方法进行仿真试验。仿真结果表明: 当大型飞机的最大、最小巡航速度分别为880、620km·h-1, 中型飞机的最大、最小巡航速度分别为790、525km·h-1, 且2种机型加速度的最大值、最小值均分别为0.608、-0.780m·s-2时, 空中走廊中飞机的飞行状态可以划分为4种典型工况; 第1种工况下, 飞机的速度始终为745.17km·h-1, 总飞行时间为708s;第2种工况下, 飞机根据前方飞机调整自身飞行速度, 飞机初始速度为658km·h-1, 最大速度为778km·h-1, 总飞行时间为648s;第3种工况下, 飞机为避免飞行冲突变更空中走廊中的飞行线路, 总飞行时间为744s;第4种工况下, 飞机因安全问题脱离空中走廊, 总飞行时间为66s。提出的模型可满足实际要求。Abstract: The flight risk of aircraft agent flying in air corridor was studied by using multi-agent modeling and simulation technique. According to the flight aim, main function and interior structure of aircraft agent in air corridor, the inference rule and collaborative state were analyzed, the interactive structure of collaborative flight was put out, and simulation experiment was carried out by using hybrid simulation method. Simulation result shows that when the maximum and minimum cruising speeds of large-sized aircraft are 880, 620 km·h-1 respectively, the maximum and minimum cruising speeds of medium-sized aircraft are 790, 525 km·h-1 respectively, and the maximum and minimum accelerations of the two aircrafts are 0.608 and-0.780 m·s-2, the aircraft flight state in air corridor can be divided into four typical conditions. Under condition 1, aircraft speed is always 745.17 km·h-1, and the total flight time is 708 s. Under condition 2, aircraft adjusts its speed according to the leading aircraft, the initial and maximum speeds are 658, 778 km·h-1, and the total flight time is 648 s. Under condition 3, aircraft changes its flight line in air corridor in order to avoid flight conflict, and the total flight time is 744 s. Under condition 4, aircraft breaks away from air corridor for safety problem, and the total flight time is 66 s. The proposed model can meet the actual requirement.
-
[1] Joint Planning and Development Office. Concept of operations for the next generation air transportation system[R]. Washington DC: Federal Aviation Administration, 2007. [2] ALIPIO J, CASTRO P, KAING H, et al. Dynamic airspace super sectors (DASS) as high-density highways in the sky for a new US air traffic management system[C]//IEEE. Proceedings of the 2003Systems and Information Engineering Design Symposium. New York: IEEE, 2003: 57-66. [3] YOUSEFI A, DONOHUE G. High-volume tube-shape sectors (HTS): a network of high capacity ribbons connecting congested city pairs[C]//IEEE. The 23rd Digital Avionics Systems Conference. New York: IEEE, 2004: 12-21. [4] SRIDHAR B, GRABBE S, SHETH K, et al. Initial study of tube networks for flexible airspace utilization[C]//AIAA. 2006AIAA Guidance, Navigation, and Control Conference. Washington DC: AIAA, 2006: 237-252. [5] HOFFMAN R, PRETE J. Principles of airspace tube design for dynamic airspace configuration[C]//AIAA. 26th Congress of International Council of the Aeronautical Sciences. Anchorage: AIAA, 2008: 108-139. [6] XUE Min, KOPARDEKAR P. High-capacity tube network design using the hough transform[J]. Journal of Guidance, Control and Dynamics, 2009, 32 (3): 788-795. doi: 10.2514/1.40386 [7] XUE Min, ZELINSKI S J. Complexity analysis of traffic in corridors-in-the-sky[C]//AIAA. 10th AIAA Aviation Technology, Integration and Operations Conference. Fort Worth: AIAA, 2000: 110-122. [8] HEXMOOR H, HENG T. Air traffic control agents: landing and collision avoidance[C]//AIAA. International Conference in Artificial Intelligence. Las Vegas: AIAA, 2000: 21-35. [9] NITSCHKE G. Cooperating air traffic control agents[J]. Applied Artificial Intelligence, 2001, 15 (2): 209-235. doi: 10.1080/088395101750065778 [10] CALLANTINE T J. CATS-based air traffic controller agents[R]. Sacramento: NASA Ames Research Center, 2002. [11] NGUYEN M, BRIOT J, DROGOUL A. An application of multi-agent coordination techniques in air traffic management[C]//IEEE. 2003IEEE/WIC International Conference in Intelligent Agent Technology. Halifax: IEEE, 2003: 622-625. [12] HILL J, ARCHIBALD J, STIRLING W, et al. A multi-agent system architecture for distributed air traffic control[C]//AIAA. 2005AIAA Guidance, Navigation and Control Conference. San Francisco: AIAA, 2005: 1005-1049. [13] AGOGINO A, TUMER K. Learning indirect actions in complex domains: action suggestions for air traffic control[J]. Advances in Complex Systems, 2009, 12 (4): 493-512. [14] 张洪海. 机场终端区协同流量管理关键技术研究[D]. 南京: 南京航空航天大学, 2009.ZHANG Hong-hai. The key technologies of collaborative flow management in airport terminal area[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009. (in Chinese). [15] 黎新华, 张兆宁. 基于Agent的空中交通流量管理系统结构研究[J]. 交通运输工程与信息学报, 2007, 5 (1): 56-61. https://www.cnki.com.cn/Article/CJFDTOTAL-JTGC200701011.htmLI Xin-hua, ZHANG Zhao-ning. Research of the structure of air traffic flow management system based on the agent[J]. Journal of Transportation Engineering and Information, 2007, 5 (1): 56-61. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTGC200701011.htm [16] 王万乐. Multi-Agent系统在飞行冲突探测与解脱中的应用[J]. 交通信息与安全, 2009, 27 (3): 9-15. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200903002.htmWANG Wan-le. Application of multi-agent system in flight conflict detection and resolution[J]. Journal of Transport Information and Safety, 2009, 27 (3): 9-15. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200903002.htm [17] 戴玲, 夏学知. 多Agent技术在飞行冲解脱中的应用[J]. 舰船电子工程, 2009, 28 (3): 62-64, 89. https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC200803018.htmDAI Ling, XIA Xue-zhi. Application of multi-agent in flight conflict resolution[J]. Ship Electronic Engineering, 2009, 28 (3): 62-64, 89. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC200803018.htm [18] 王超, 徐肖豪. 基于Agent的空中交通系统建模与仿真研究[J]. 计算机工程与应用, 2008, 44 (31): 12-14. https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG200831004.htmWANG Chao, XU Xiao-hao. Researching on air traffic system using agent-based modeling and simulation[J]. Computer Engineering and Applications, 2008, 44 (31): 12-14. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG200831004.htm [19] 王飞, 徐肖豪, 张静. 基于Multi-Agent的空中交通协同流量管理[J]. 广西师范大学学报: 自然科学版, 2008, 26 (1): 125-128. https://www.cnki.com.cn/Article/CJFDTOTAL-GXSF200801032.htmWANG Fei, XU Xiao-hao, ZHANG Jing. Air traffic flow collaborate management based on multi-agent[J]. Jounal of Guangxi Normal University: Natural Science Edition, 2008, 26 (1): 125-128. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GXSF200801032.htm [20] 张钧翔, 胡明华. 基于多Agent的多机场终端区空中交通智能仿真系统设计[J]. 交通运输工程与信息学报, 2009, 7 (2): 90-98. https://www.cnki.com.cn/Article/CJFDTOTAL-JTGC200902019.htmZHANG Jun-xiang, HU Ming-hua. Design of the air traffic intelligent simulation system for the airport with multi-terminal areas based on multi-agents[J]. Journal of Transportation Engineering and Information, 2009, 7 (2): 90-98. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTGC200902019.htm [21] YOUSEFI A, LARD J, TIMMERMAN J. Nextgen flow corridors initial design, procedures, and display functionalities[C]//IEEE. 29th Digital Avionics Systems Conference. Salt Lake City: IEEE, 2010: 201-219. [22] YOUSEFI A, ZADEH A N. Dynamic allocation and benefit assessment of nextgen flow corridors[J]. Transportation Research Part C: Emerging Technologies, 2013, 33 (2): 297-310. [23] 黄卫芳. 美国区域导航航路划设和实施研究[J]. 空中交通管理, 2011 (2): 8-10, 46.HUANG Wei-fang. Studies on US RNAV route alignment and implementation[J]. Air Traffic Management, 2011 (2): 8-10, 46. (in Chinese). [24] STROEVE S, BLOM H, BAKKER G. Systemic accident risk assessment in air traffic by Monte Carlo simulation[J]. Safety Science, 2009, 47 (2): 238-249. -

 下载:
下载:






 点击查看大图
点击查看大图
图(19) / 表(1)
计量
- 文章访问数: 873
- HTML全文浏览量: 165
- PDF下载量: 979
- 被引次数: 0
