

-
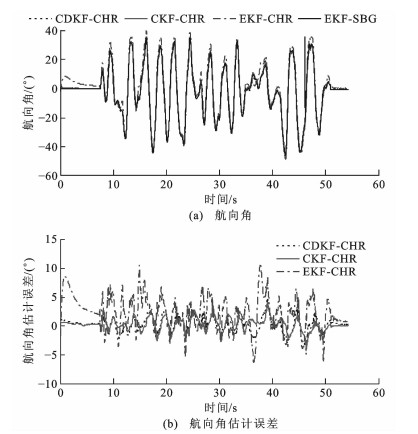
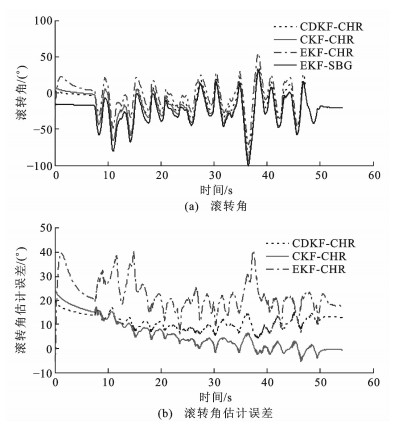
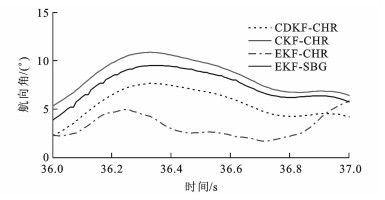
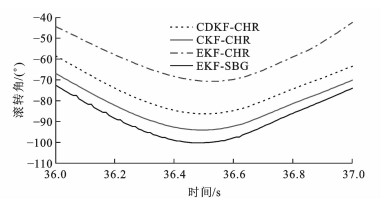
摘要: 为了提高非线性模型下飞机姿态估计的精度, 建立了基于四元数与低精度高噪声传感器的飞机姿态估计模型, 应用基于球面径向积分准则的容积卡尔曼滤波算法进行姿态估计, 通过实测数据进行模型与算法验证, 并与扩展卡尔曼滤波算法和中心差分卡尔曼滤波算法估计结果进行了比较。对比结果表明: 采用容积卡尔曼滤波算法能够有效提高飞机姿态估计的精度和稳定性, 估计误差最小, 估计时间最短, 而且, 在运算过程中无需求导与可调参数。Abstract: In order to improve the estimation accuracy of aircraft attitude in nonlinear model, a nonlinear estimation model based on the quaternion and the sensors with less accuracy and higher noise was established, and the cubature Kalman filter(CKF) algorithm based on spherical-radial cubature rules was applied to estimate the attitude. The model and algorithm were verified by using the real flying data. The estimation results of cubature Kalman filter algorithm, extended Kalman filter (EKF) algorithm and central difference Kalman filter (CDKF) algorithm were compared. Comparison result indicates that the estimation precision and stability of CKF are higher, its estimation time and error are minimum, and the derivation and adjustable parameters are not required in the estimation. 1 tab, 7 figs, 15 refs.
-
Key words:
- attitude estimation /
- strap-down inertial navigation system /
- CKF /
- EKF /
- CDKF /
- quaternion
-
表 1 三种算法运算时间比较
Table 1. Computing time comparison of 3 algorithms

-
[1] CRASSIDIS J L, MARKLEY F L. Unscented filtering for spacecraft attitude estimation[J]. Journal of Guidance, Control and Dynamics, 2003, 26(4): 536-542. [2] MARINS J L, YUN Xiao-ping, BACHMANN E R, et al. An extended Kalman filter for quaternion-based orientation estimation using MARG sensors[C]∥IEEE. Proceedings of the 2001 IEEE/RSJ International Conference on Intelligence Robots and Systems. Maui: IEEE, 2001: 2003-2011. [3] NORGAARD M, POULSEN N K, RAVN O. New developments in state estimation for nonlinear systems[J]. Automatica, 2000, 36(11): 1627-1638. doi: 10.1016/S0005-1098(00)00089-3 [4] NORGAARD M, POULSEN N K, RAVN O. Advances in derivative-free state estimation for nonlinear system[R]. Copenhagen: Technical University of Denmark, 2004. [5] MERWE R, WAN E. Sigma-point Kalman filters for probabilistic inference in dynamic state-space models[D]. Portland: Oregon Health and Science University, 2004. [6] WU Yuan-xin, HU De-wen, WU Mei-ping, et al. An numerical-integration perspective on Guassian filters[J]. IEEE Transactions on Signal Processing, 2006, 54(8): 2910-2921. doi: 10.1109/TSP.2006.875389 [7] ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. doi: 10.1109/TAC.2009.2019800 [8] ARASARATNAM I. Cubature Kalman filtering: theory and applications[D]. Hamilton: McMaster University, 2009. [9] FEMANDEZ-PRADES C, VILA-VALLS J. Bayesian nonlinear filtering using quadrature and cubature rules applied to sensor data fusion for positioning[C]∥IEEE. 2010 IEEE International Conference on Communications. Cape Town: IEEE, 2010: 1-5. [10] LIU Jiang, CAI Bai-gen, TANG Tao, et al. A CKF based GNSS/INS train integrated positioning method[C]∥IEEE. 2010 International Conference on Mechatronics and Automation. Xi'an: IEEE, 2010: 1686-1689. [11] PESONEN H, PICHE R. Cubature-based Kalman filters for positioning[C]∥IEEE. Proceedings of the 7th Workshop on Positioning, Navigation and Communication. Dresden: IEEE, 2010: 45-49. [12] LI Wen-ling, JIA Ying-ming. Location of mobile station with maneuvers using an IMM-based cubature Kalman filter[J]. IEEE Transactions on Industrial Electronics, 2012, 59(11): 4338-4348. doi: 10.1109/TIE.2011.2180270 [13] 鹿传国, 冯新喜, 张迪. 基于改进容积卡尔曼滤波的纯方位目标跟踪[J]. 系统工程与电子技术, 2012, 34(1): 28-33. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201201005.htmLU Chuan-guo, FENG Xin-xi, ZHANG Di. Pure bearing tracking based on improved cubature Kalman filter[J]. Systems Engineering and Electronics, 2012, 34(1): 28-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201201005.htm [14] SHUSTER M D. Survey of attitude representations[J]. Journal of the Astronautical Sciences, 1993, 41(4): 439-517. [15] KARLGAARD C, SCHAUB H. Adaptive huber-based filtering using projection statistics: application to spacecraft attitude estimation[C]∥AIAA. 2008 AIAA Guidance, Navigation, and Control Conference. Honolulu: AIAA, 2008: 1-20. -

 下载:
下载:


 点击查看大图
点击查看大图

图(7) / 表(1)
计量
- 文章访问数: 581
- HTML全文浏览量: 166
- PDF下载量: 1437
- 被引次数: 0
