

Small-scale similarity model of maglev-guideway coupling vibration
-
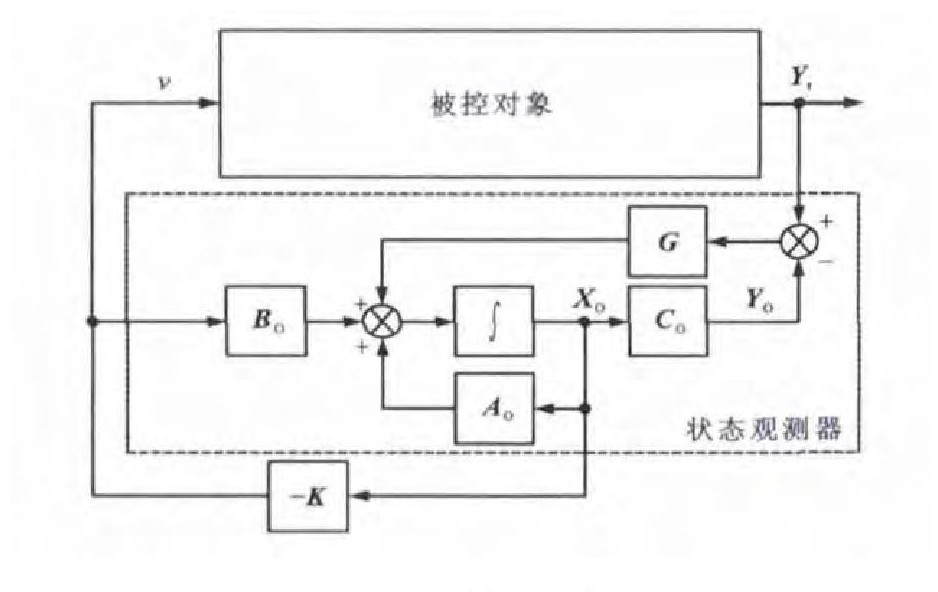
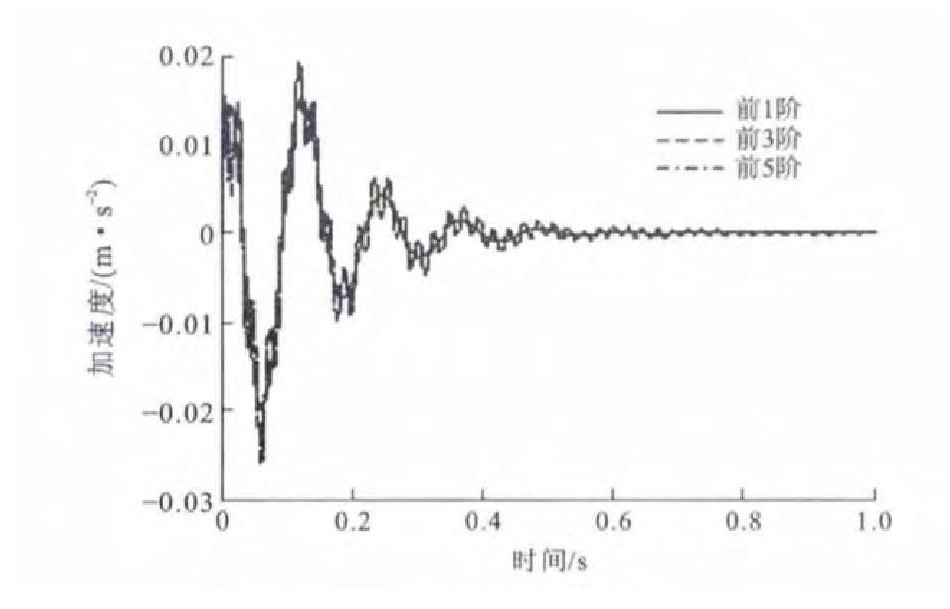
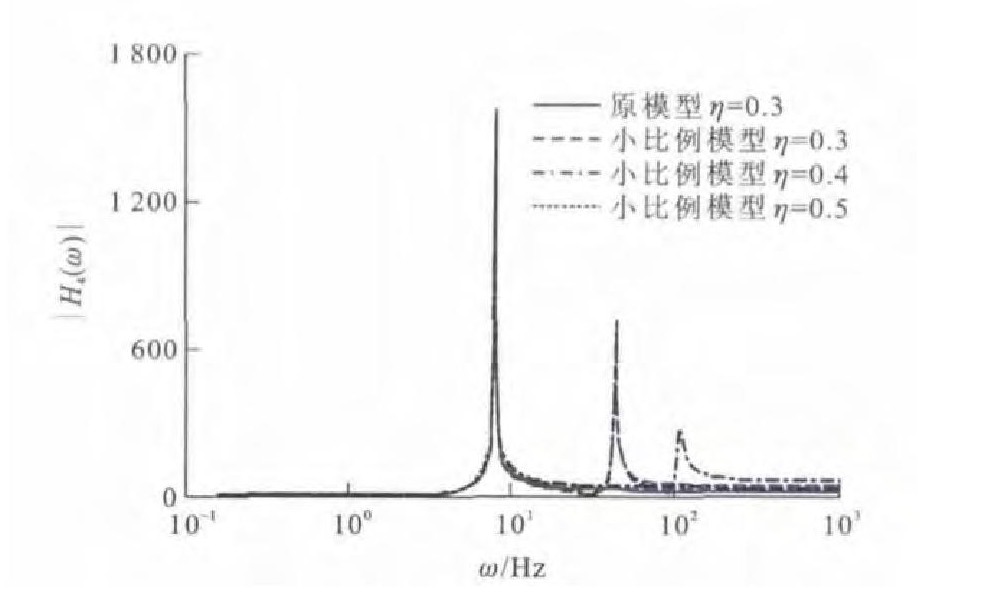
摘要: 将磁悬浮车轨耦合振动系统简化为单磁铁-Bernoulli-Euler梁模型, 设计了5种状态变量的反馈控制器, 分别在时、频域上研究了系统的动力学特性。依据相似理论建立了单磁铁车轨耦合系统的小比例模型, 推导了动力学系统的相似关系, 分析了小比例模型的相似特性。研究结果表明: 提出的磁悬浮控制方法利用轨道梁低阶模态与电磁铁振动信息得出控制器输出, 方法有效; 利用所设计的控制器, 系统能够在0.27s达到稳定状态, 最大超调量为2%;在单磁铁的车轨耦合振动系统中, 取其3阶模态即可较精确地反映其振动特性, 而当轨道梁各阶频率相差较大时, 对系统的低频特性分析, 在仅取第1阶模态时也可得出较精确的结果; 通过相似理论得到的小比例磁悬浮车轨耦合振动模型的动力学特性与原模型一致。Abstract: Simplified as a model composed of single magnet and Bernoulli-Euler beam, the maglevguideway coupling vibration system with 5-state-variable feedback controller was designed to study the dynamics performances of the system in the time and frequency domain. A small-scale model of single magnet-guideway coupling vibration system was established based on the similarity theory, its similarity performances were studied, and the similarity relationship of the dynamics systems was analyzed. Study result shows that the maglev control method, calculating the controller output with the vibration informations of guideway's low order mode and magnet, is effective and can keep the system stable. The step response of the system indicates that the developed controller can stabilize the system in 0.27 swith the overshot 2%. The first 3 order modes can be used to accurately describe the dynamics characteristics of coupling vibration system. For analyzing the lower frequency characteristics of the system, the first 1 order mode is sufficient when the large difference among the lower frequencies exists. The small-scale model obtained according to the similarity theory is coincident with the original model in the dynamics performances.
-

图 13 电磁铁加速度频域响应的比较
Figure 13. Frequency domain response comparison of electromagnet accelerations

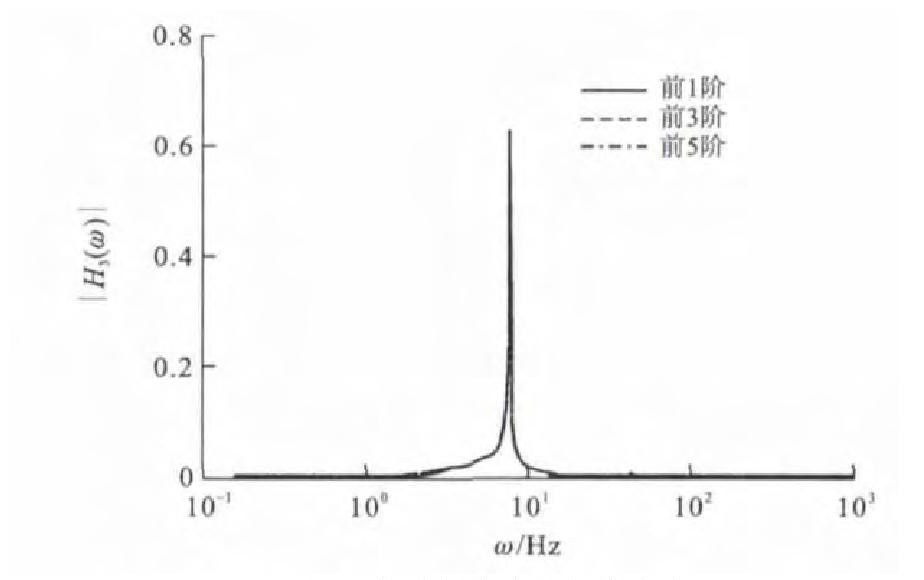
图 14 轨道梁位移频域响应的比较
Figure 14. Frequency domain response comparison of guideway displacements

图 15 轨道梁加速度频域响应的比较
Figure 15. Frequency domain response comparison of guideway accelerations
表 2 车轨耦合振动系统的等效参数
Table 2. Equivalent parameters of vehicle-guideway coupling vibration model

 下载: 导出CSV
下载: 导出CSV
-
[1] LEE H W, KIM K C, LEE J. Review of maglev train technologies[J]. IEEE Transactions on Magnetics, 2006, 42 (7): 1917-1925. doi: 10.1109/TMAG.2006.875842 [2] YAN Lu-guang. Suggestion for selection of maglev option for Beijing-Shanghai high-speed line[J]. IEEE Transactions on Applied Superconductivity, 2004, 14 (2): 936-939. doi: 10.1109/TASC.2004.830324 [3] ZHOU Dan-feng, HANSEN C H, LI Jie, et al. Review of coupled vibration problems in EMS maglev vehicles[J]. International Journal of Acoustics and Vibration, 2010, 15 (1): 10-23. [4] YAU J D. Vibration control of maglev vehicles traveling over a flexible guideway[J]. Journal of Sound and Vibration, 2009, 321 (1/2): 184-200. [5] YAU J D. Response of a maglev vehicle moving on a series of guideways with differential settlement[J]. Journal of Sound and Vibration, 2009, 324 (3): 816-831. [6] 王辉, 钟晓波, 沈钢. 一种新型磁悬浮线路设计方案及悬浮控制方法[J]. 同济大学学报: 自然科学版, 2013, 41 (7): 1112-1118. doi: 10.3969/j.issn.0253-374x.2013.07.026WANG Hui, ZHONG Xiao-bo, SHEN Gang. A new maglev line system design and control strategy[J]. Journal of Tongji University: Natural Science, 2013, 41 (7): 1112-1118. (in Chinese). doi: 10.3969/j.issn.0253-374x.2013.07.026 [7] 崔鹏, 李杰, 张锟. 基于补偿反馈线性化的悬浮控制器设计[J]. 铁道学报, 2010, 32 (2): 37-40. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201002009.htmCUI Peng, LI Jie, ZHANG Kun. Design of the suspension controller based on compensated feedback linearization[J]. Journal of the China Railway Society, 2010, 32 (2): 37-40. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201002009.htm [8] ZHOU Dan-feng, LI Jie, HANSEN C H. Application of least mean square algorithm to suppression of maglev trackinduced self-excited vibration[J]. Journal of Sound and Vibration, 2011, 330 (24): 5791-5811. doi: 10.1016/j.jsv.2011.07.021 [9] KONG E, SONG J S, KANG B B, et al. Dynamic response and robust control of coupled maglev vehicle and guideway system[J]. Journal of Sound and Vibration, 2011, 330 (25): 6237-6253. doi: 10.1016/j.jsv.2011.05.031 [10] 王辉, 钟晓波, 沈钢. 弹性轨道梁上磁悬浮控制方法[J]. 交通运输工程学报, 2013, 13 (5): 33-38, 46. http://transport.chd.edu.cn/article/id/201305005WANG Hui, ZHONG Xiao-bo, SHEN Gang. Control strategy of maglev on elastic track[J]. Journal of Traffic and Transportation Engineering, 2013, 13 (5): 33-38, 46. (in Chinese). http://transport.chd.edu.cn/article/id/201305005 [11] 任永明. 公路桥梁车桥耦合振动模型试验研究[D]. 南昌: 华东交通大学, 2011.REN Yong-ming. The model test study of highway bridge on vehicles-bridge coupling vibration[D]. Nanchang: East China Jiaotong University, 2011. (in Chinese). [12] 郑亮. 高墩大跨桥梁车桥耦合振动模型试验研究[D]. 西安: 长安大学, 2011.ZHENG Liang. Model test on vehicle-bridge coupled vibration for the long-span bridge with high-pier[D]. Xi'an: Chang'an University, 2011. (in Chinese). [13] GUI Shui-rong, CHEN Shui-sheng, REN Yong-ming. Study on vibration test of the scale-model system for highway bridge-vehicle interaction according to the similarity law[C]∥IEEE. 2011International Conference on Remote Sensing, Environment and Transportation Engineering. Nangjing: IEEE, 2011: 1735-1739. [14] MEISINGER R. Control systems for flexible maglev vehicles riding over flexible guideways[J]. Vehicle Dynamic System, 1975, 4 (2/3): 200-202. [15] 田宇. 考虑车轨相对位置的车轨耦合振动控制研究[D]. 长沙: 国防科技大学, 2011.TIAN Yu. Research on the vehicle-guideway coupled vibration control considering the relative position between the vehicle and the guideway[D]. Changsha: National University of Defense Technology, 2011. (in Chinese). -













 点击查看大图
点击查看大图
计量
- 文章访问数: 636
- HTML全文浏览量: 130
- PDF下载量: 2500
- 被引次数: 0
