

Joint estimation method of key parameters for automotive active safety
-
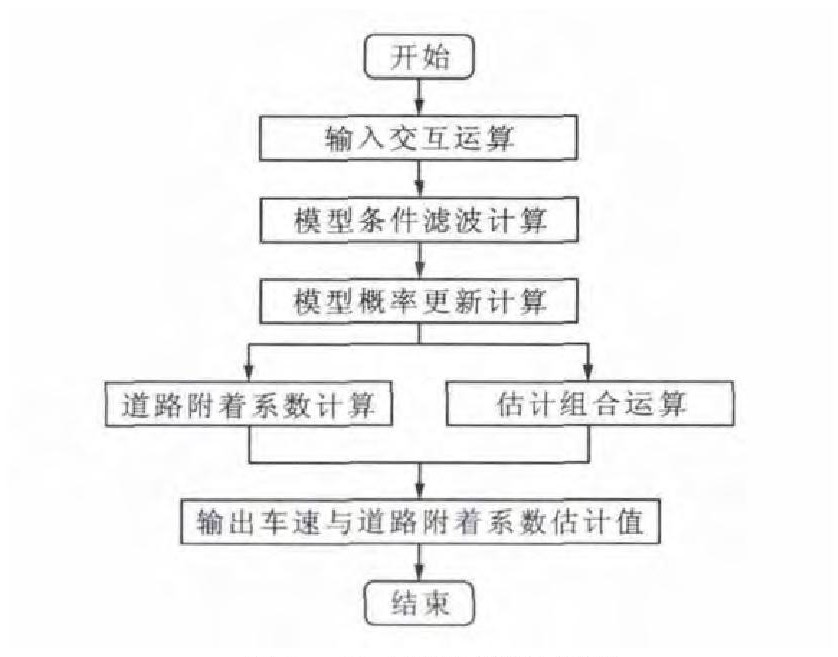
摘要: 针对汽车主动安全系统的需求, 提出了一种包括纵向、侧向车速与附着系数的汽车主动安全参数的联合估计方法。基于3自由度车辆动力学模型和刷子轮胎模型, 建立不同道路附着系数条件下的扩展卡尔曼滤波模型, 利用交互多模型算法实现纵向、侧向车速的自适应估计, 并根据计算出的各模型概率实现道路附着系数的实时估计。计算结果表明: 该方法能在不同道路附着系数条件下进行车速的准确估计, 纵向车速估计误差小于1%, 侧向车速估计误差小于5%, 与扩展卡尔曼方法相比误差减小了50%以上, 且能够实时给出道路附着系数估计值, 估计误差小于0.1, 对路面突变的响应时间低于2s。Abstract: According to the requirements of automotive active safety system, ajoint estimation method of key parameters for automotive active safety including automotive longitudinal velocity, lateral velocity and road friction coefficient was proposed. Based on automotive dynamics model with 3 degrees of freedom and brush tire model, the extended Kalman filter models under different road friction coefficient conditions were established. Automotive longitudinal velocity and lateral velocity were adaptively estimated by using the interacting multiple model, and the road friction coefficient could be real-timely estimated based on the calculated model probabilities. Calculation result shows that the method can accurately estimate automotive longitudinal and lateral velocities under different road friction coefficient conditions, the estimation error rates are less than 1% and 5% respectively. Compared with extended Kalman filter method, the estimation error of automotive velocity estimated by using the method reduces by more than 50%. When road condition mutates, the road friction coefficient can be real-timely estimated, the estimation error is less than 0.1, and the response time is less than 2 s.
-

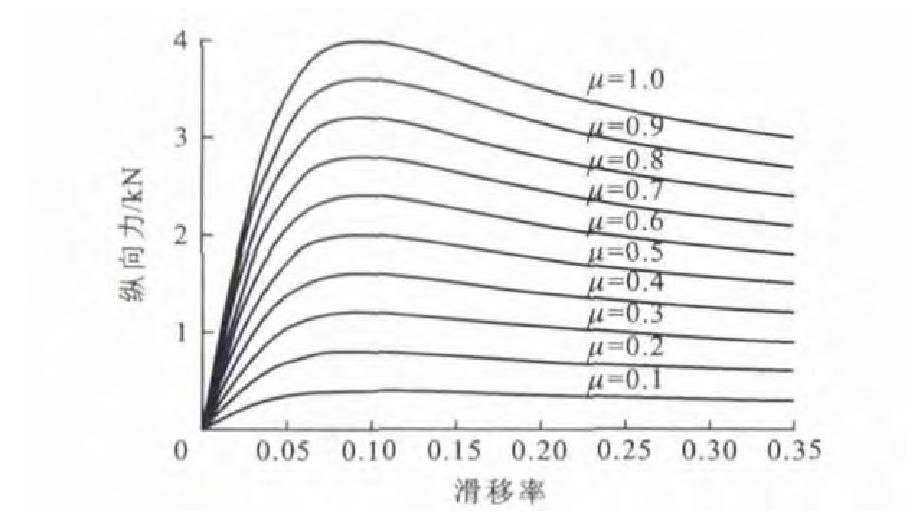
图 1 车轮纵向力与滑移率关系
Figure 1. Relationship between longitudinal force and slip ratio of tire

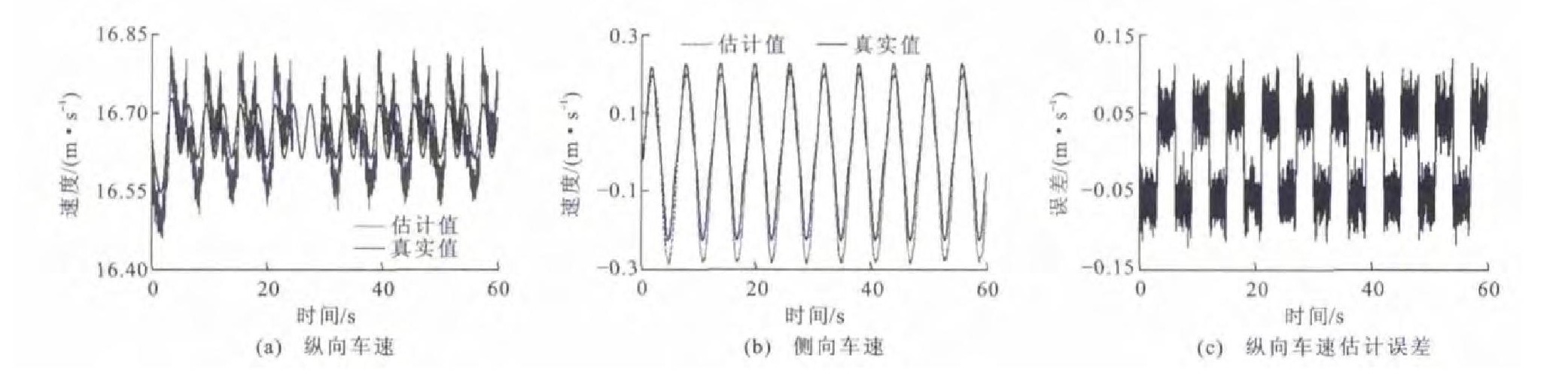
图 3 单一附着系数路面本文算法估计结果
Figure 3. Estimation result of proposed algorithm without change of road friction coefficient

图 4 单一附着系数路面EKF算法估计结果
Figure 4. Estimation result of EKF algorithm without change of road friction coefficient

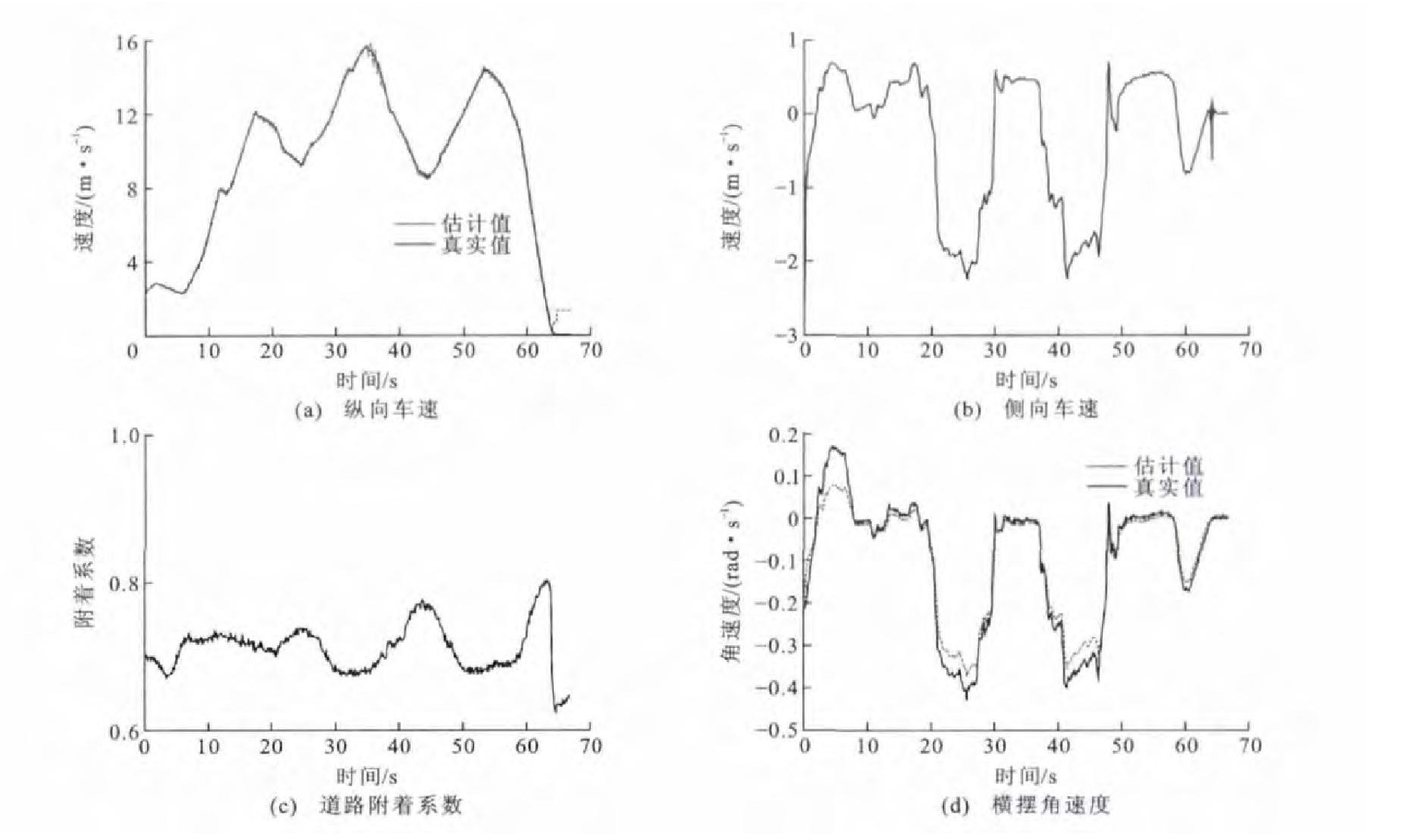
图 5 附着系数突变路面本文算法估计结果
Figure 5. Estimation result of proposed algorithm with change of road friction coefficient

图 6 附着系数突变路面仿真车辆运行工况参数
Figure 6. Vehicle parameters in simulation under running condition with change of road friction coefficient

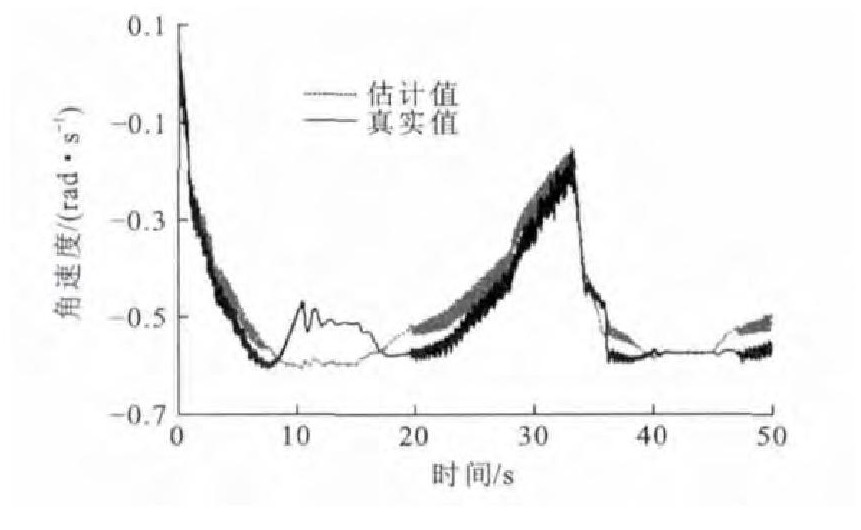
图 7 附着系数突变路面车辆横摆角速度估计结果
Figure 7. Estimation result of vehicle yaw rate with change of road friction coefficient

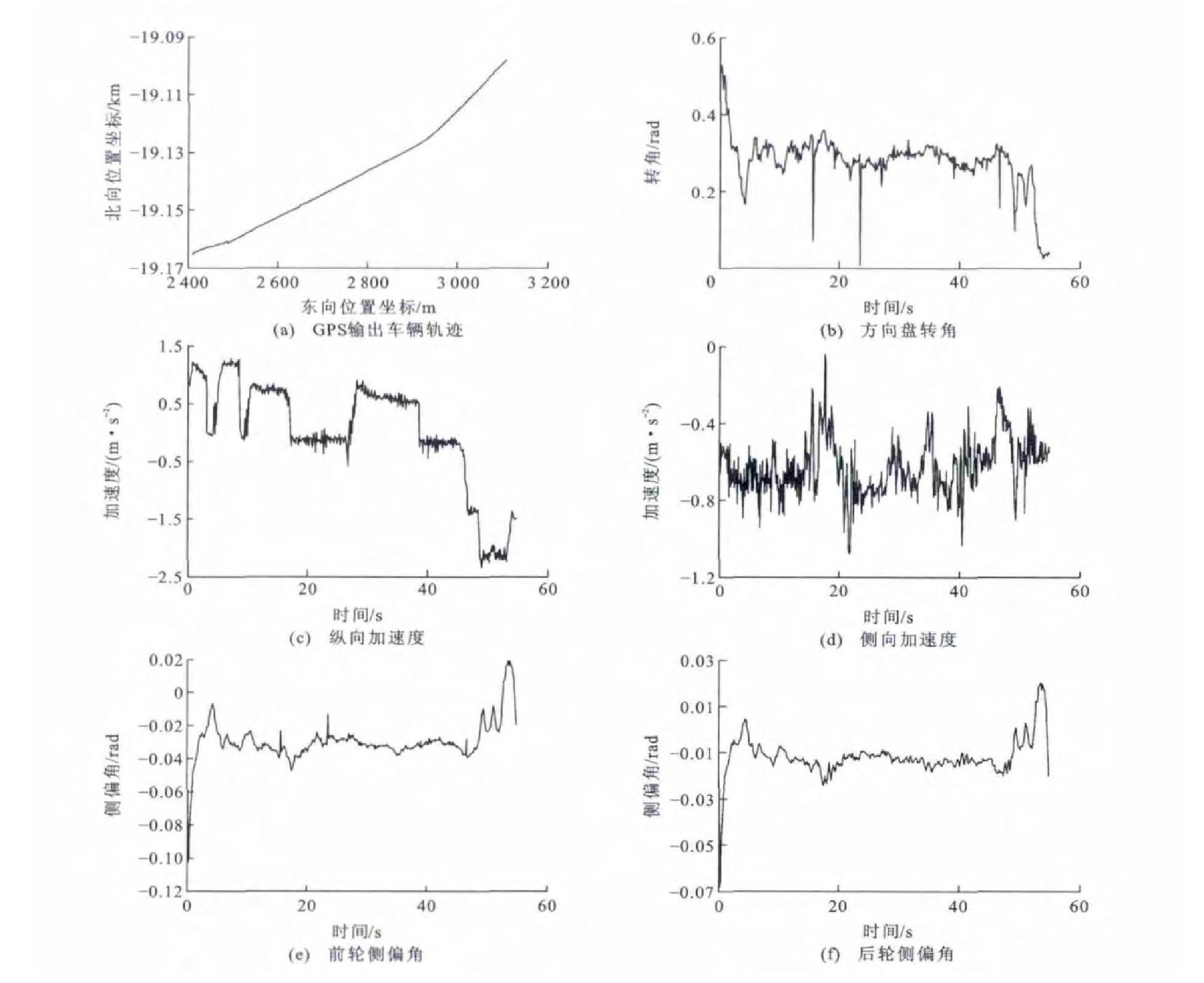
图 8 单一附着系数路面试验车辆运行工况参数
Figure 8. Vehicle parameters in experiment under running condition with unchanging road friction coefficient

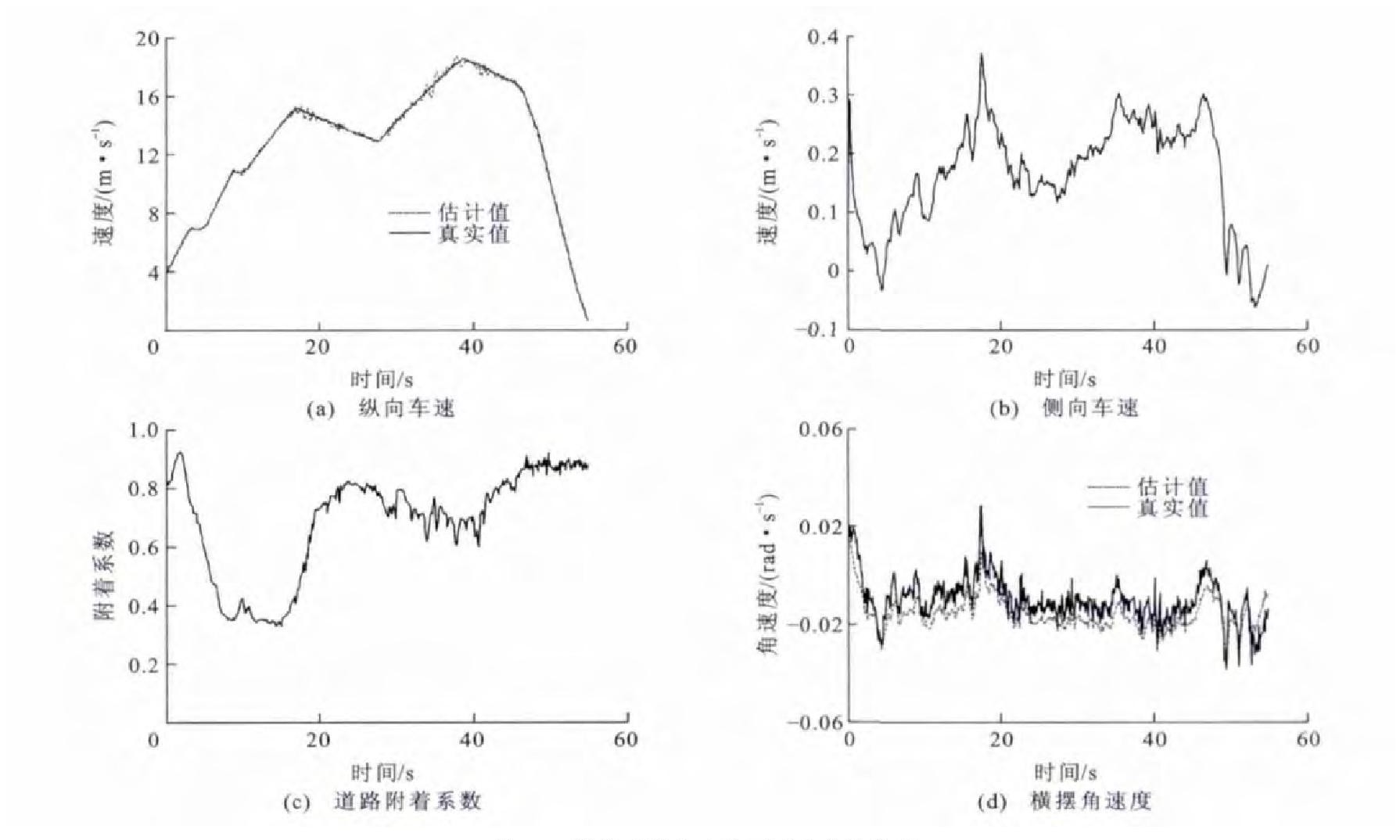
图 9 单一附着系数路面试验估计结果
Figure 9. Estimation result in experiment with unchanging road friction coefficient

图 10 附着系数突变路面试验估计结果
Figure 10. Estimation result in experiment with changing road friction coefficient

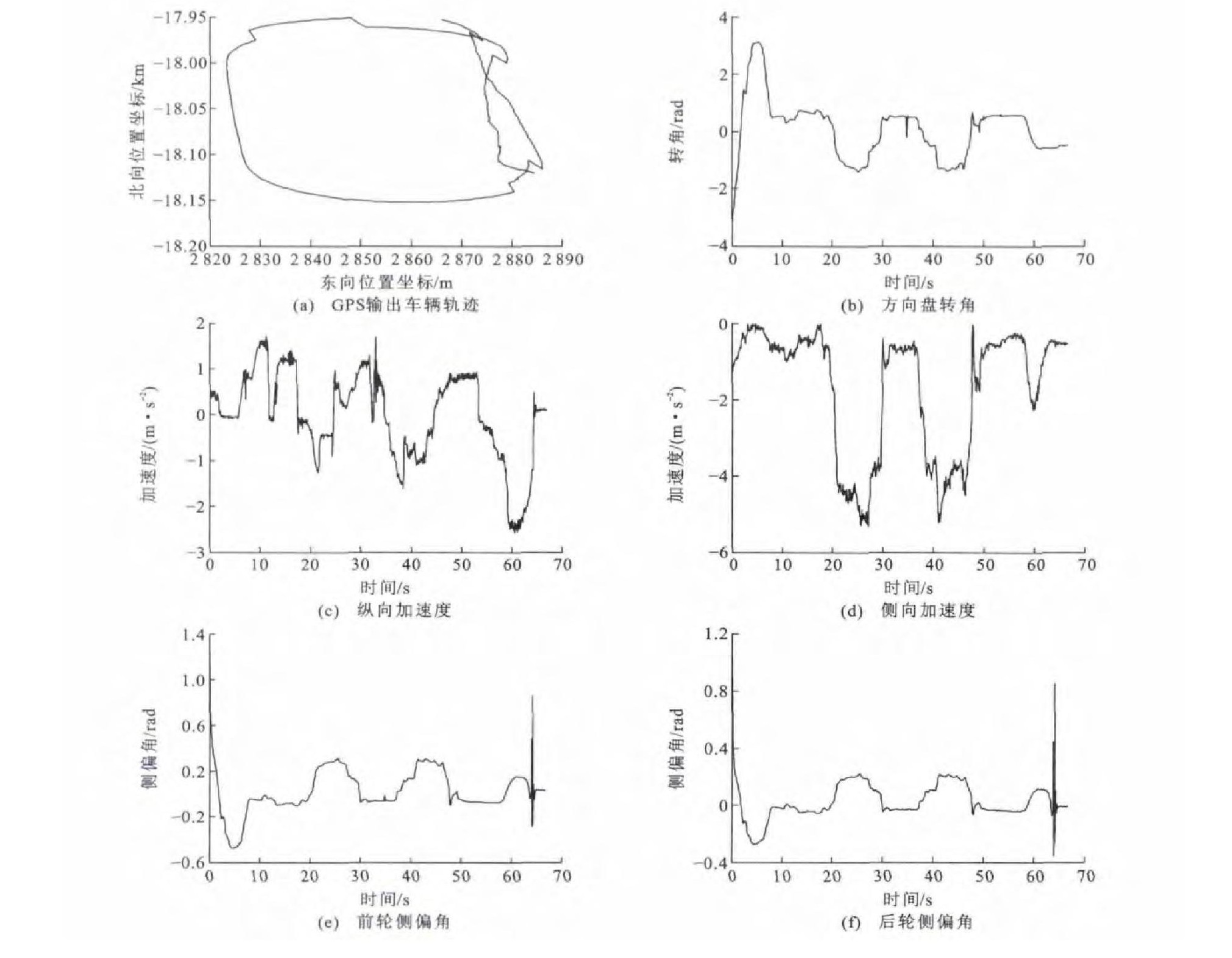
图 11 附着系数突变路面试验车辆运行工况参数
Figure 11. Vehicle parameters in experiment under running condition with changing road friction coefficient
表 2 单一附着系数路面上估计效果对比
Table 2. Estimation effect comparison without change of road friction coefficient

 下载: 导出CSV
下载: 导出CSV
表 3 附着系数突变路面上估计效果的对比
Table 3. Estimation effect comparison with change of road friction coefficient
 下载: 导出CSV
下载: 导出CSV
-
[1] LEUNG K T, WHIDBORNE J F, PURDY D, et al. A review of ground vehicle dynamic state estimations utilising GPS/INS[J]. Vehicle System Dynamics, 2011, 49 (1/2): 29-58. [2] 余卓平, 高晓杰. 车辆行驶过程中的状态估计问题综述[J]. 机械工程学报, 2009, 45 (5): 20-33. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200905005.htmYU Zhuo-ping, GAO Xiao-jie. Review of vehicle state estimation problem under driving situation[J]. Journal of Mechanical Engineering, 2009, 45 (5): 20-33. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200905005.htm [3] CHEN B C, HSIEH F C. Sideslip angle estimation using extended Kalman filter[J]. Vehicle System Dynamics, 2008, 46 (S1): 353-364. [4] 郑太雄, 马付雷. 基于逻辑门限值的汽车ABS控制策略[J]. 交通运输工程学报, 2010, 10 (2): 69-74. doi: 10.3969/j.issn.1671-1637.2010.02.013ZHENG Tai-xiong, MA Fu-lei. Automotive ABS control strategy based on logic threshold[J]. Journal of Traffic and Transportation Engineering, 2010, 10 (2): 69-74. (in Chinese). doi: 10.3969/j.issn.1671-1637.2010.02.013 [5] LI L, SONG J, KONG L, et al. Vehicle velocity estimation for real-time dynamic stability comtrol[J]. International Journal of Automative Technology, 2009, 10 (6): 675-685. doi: 10.1007/s12239-009-0080-7 [6] 赵林辉, 刘志远, 陈虹. 一种车辆状态滑模观测器的设计方法[J]. 电机与控制学报, 2009, 13 (4): 565-570. doi: 10.3969/j.issn.1007-449X.2009.04.017ZHAO Lin-hui, LIU Zhi-yuan, CHEN Hong. Design method of sliding model observer for vehicle state[J]. Electric Machines and Control, 2009, 13 (4): 565-570. (in Chinese). doi: 10.3969/j.issn.1007-449X.2009.04.017 [7] ZHENG Tai-xiong, MA Fu-lei, ZHANG Kai-bi. Estimation of reference vehicle speed based on T-S fuzzy model[J]. Procedia Engineering, 2011, 15: 188-193. doi: 10.1016/j.proeng.2011.08.038 [8] MELZI S, SABBIONI E. On the vehicle sideslip angle estimation through neural networks: numerical and experimental results[J]. Mechanical Systems and Signal Processing, 2011, 25 (6): 2005-2019. doi: 10.1016/j.ymssp.2010.10.015 [9] ZONG Chang-fu, HU Dan, ZHENG Hong-yu. Dual extended Kalman filter for combined estimation of vehicle state and road friction[J]. Chinese Journal of Mechanical Engineering, 2013, 26 (2): 313-324. [10] 吴利军, 王跃建, 李克强. 面向汽车纵向安全辅助系统的路面附着系数估计方法[J]. 汽车工程, 2009, 31 (3): 239-243. doi: 10.3321/j.issn:1000-680X.2009.03.010WU Li-jun, WANG Yue-jian, LI Ke-qiang. Estimation method of road adhesion coefficient for vehicle longitudinal safety assistant system[J]. Automotive Engineering, 2009, 31 (3): 239-243. (in Chinese). doi: 10.3321/j.issn:1000-680X.2009.03.010 [11] TANELLI M, PIRODDI L, SAVARESI S M. Real-time identification of tire-road friction conditions[J]. IET Control Theory Applications, 2009, 3 (7): 891-906. doi: 10.1049/iet-cta.2008.0287 [12] HAHN J O, RAJAMANI R, ALEXANDER L. GPS-based real-time identification of tire-road friction coefficient[J]. IEEE Transactions on Control Systems Technology, 2002, 10 (3): 331-343. [13] 陈无畏, 刘翔宇, 黄鹤, 等. 车辆转向工况下的路面附着系数估计算法[J]. 汽车工程, 2011, 33 (6): 521-526. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201106015.htmCHEN Wu-wei, LIU Xiang-yu, HUANG He, et al. An algorithm for estimating road adhesion coefficient in vehicle steering condition[J]. Automotive Engineering, 2011, 33 (6): 521-526. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201106015.htm [14] 赵林辉, 刘志远, 陈虹. 车速和路面附着系数的滚动时域估计[J]. 汽车工程, 2009, 31 (6): 520-525. doi: 10.3321/j.issn:1000-680X.2009.06.008ZHAO Lin-hui, LIU Zhi-yuan, CHEN Hong. The estimation of vehicle speed and tire-road adhesion coefficient using moving horizon strategy[J]. Automotive Engineering, 2009, 31 (6): 520-525. (in Chinese). doi: 10.3321/j.issn:1000-680X.2009.06.008 [15] LI Li, WANG Fei-yue, ZHOU Qun-zhi. Integrated longitudinal and lateral tire/road friction modeling and monitoring for vehicle motion control[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7 (1): 1-19. [16] TOLEDO-MOREO R, ZAMORA-IZQUIERDO A. Collision avoidance support in roads with lateral and longitudinal maneuver prediction by fusing GPS/IMU and digital maps[J]. Transportation Research Part C: Emerging Technologies, 2010, 18 (4): 611-625. -






 点击查看大图
点击查看大图
计量
- 文章访问数: 681
- HTML全文浏览量: 166
- PDF下载量: 763
- 被引次数: 0
