

Performance parameter estimation method of high-speed train based on Rao-Blackwellised particle filter
Article Text (Baidu Translation)
-
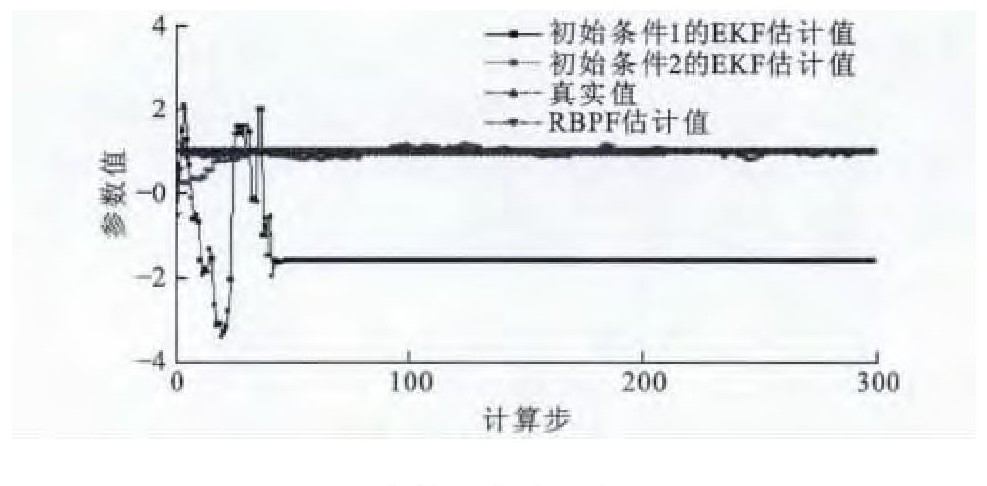
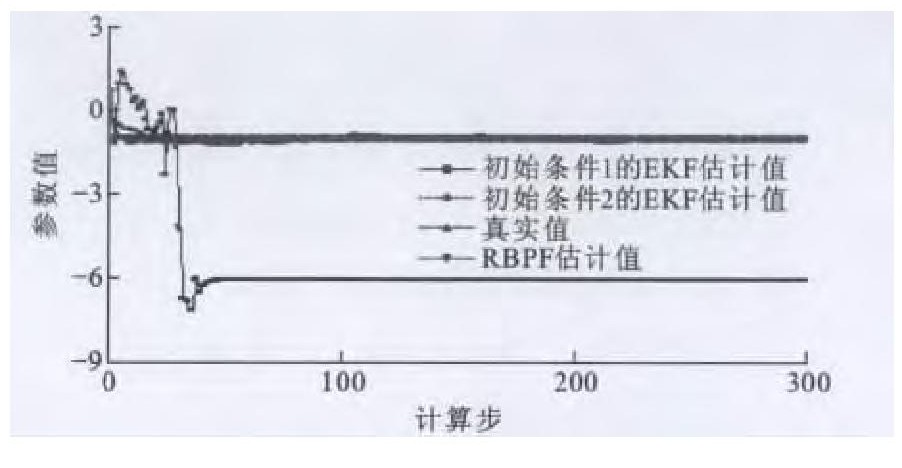
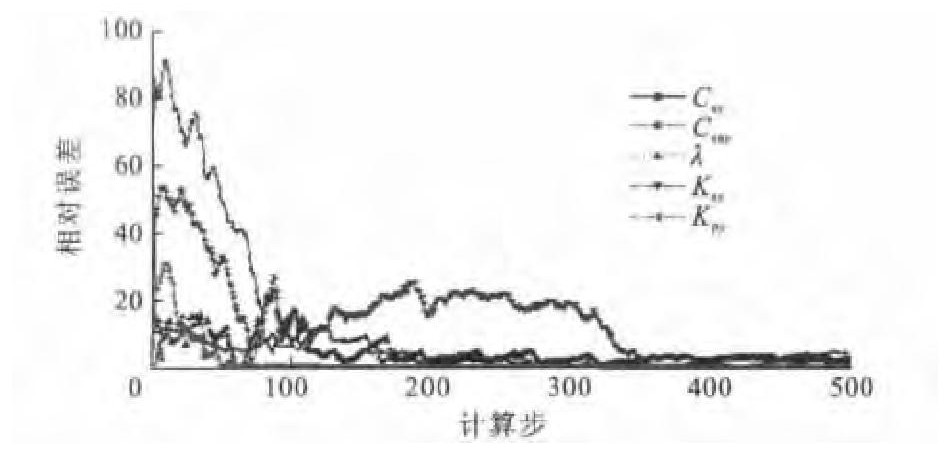
摘要: 针对高速列车参数估计中参数增广为状态变量时所出现的非线性问题, 提出一种基于边缘粒子滤波的参数估计方法。在Rao-Blackwellised (RB) 框架下, 将高速列车性能参数估计的概率模型进行分块化处理。应用卡尔曼滤波对线性的状态块进行一步预测和测量更新, 应用粒子滤波对非线性的参数块进行一步预测与测量更新, 实现参数的动态估计, 并通过理论分析和高速列车参数估计实例验证了方法的有效性。分析结果表明: 与经典的扩展卡尔曼滤波相比, 提出的方法具有对初值免疫和算法稳定的特点; 参数估计误差快速收敛到5%以内, 且提出的参数估计方法是无偏估计, 具有较好的工程适用性。Abstract: In order to solve the nonlinear problems caused in augmenting the state vector of the performance parameters of high-speed train, a method of parameter estimation based on RaoBlackwellised particle filter (RBPF) was developed.Under the framework of Rao-Blackwellised (RB) principle, the probabilistic model of parameter estimation was divided.The Kalman filter (KF) was applied for the prediction time step and measurement update of linear state block and the RBPF was applied for the prediction time step and measurement update of nonlinear parameter block to realize the dynamic estimation.Through theoretical analysis and parameter estimation example of high-speed train, the validity of RBPF method for parameter dynamic estimation was verified.Analysis result shows that compared with the classical extended KF (EKF) method, RBPF method has the characteristics of initial immunity and algorithm stability.RBPF method shows its good engineering applicability for the minor parameter estimation error which is less than 5%, and inexistence of estimation deviation.
-
Key words:
- high-speed train /
- performance parameter /
- RBPF /
- parameter estimation
-

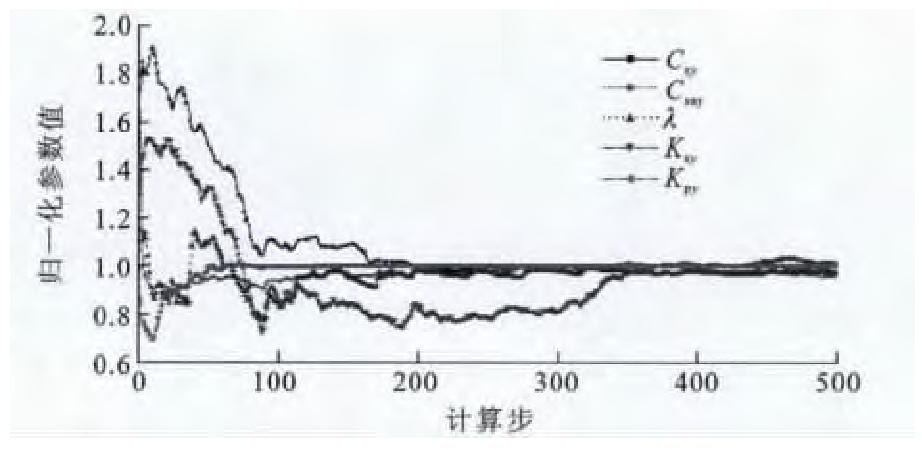
图 6 高速列车性能参数归一化估计
Figure 6. Normalized estimations of performance parameters of high-speed train
-
[1] 丁建明, 林建辉, 赵洁, 等. 车辆悬挂弹簧故障检测的能量传递特性比较法[J]. 交通运输工程学报, 2013, 13 (4): 51-55, 62. doi: 10.3969/j.issn.1671-1637.2013.04.008DING Jian-ming, LIN Jian-hui, ZHAO Jie, et al. Comparison method of energy transfer characteristics for fault detection of vehicle suspension spring[J]. Journal of Traffic and Transportation Engineering, 2013, 13 (4): 51-55, 62. (in Chinese). doi: 10.3969/j.issn.1671-1637.2013.04.008 [2] 池茂儒, 张卫华, 曾京, 等. 高速客车转向架悬挂参数分析[J]. 大连交通大学学报, 2007, 28 (3): 13-19. doi: 10.3969/j.issn.1673-9590.2007.03.004CHI Mao-ru, ZHANG Wei-hua, ZENG Jing, et al. Study of suspension parameter of high speed passenger car bogies[J]. Journal of Dalian Jiaotong University, 2007, 28 (3): 13-19. (in Chinese). doi: 10.3969/j.issn.1673-9590.2007.03.004 [3] 梁树林, 朴明伟, 郝剑华, 等. 基于3种典型踏面的高速转向架稳定性研究[J]. 中国铁道科学, 2010, 31 (3): 57-63. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201003012.htmLIANG Shu-lin, PIAO Ming-wei, HAO Jian-hua, et al. Study on stability of the high-speed bogie based on three typical wheel treads[J]. China Railway Science, 2010, 31 (3): 57-63. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK201003012.htm [4] 孟宏, 翟婉明, 王开云, 等. 高性能机车转向架的研发[J]. 铁道学报, 2005, 27 (2): 35-39. doi: 10.3321/j.issn:1001-8360.2005.02.006MENG Hong, ZHAI Wan-ming, WANG Kai-yun, et al. Research and development of high performance bogie of locomotive[J]. Journal of the China Railway Society, 2005, 27 (2): 35-39. (in Chinese). doi: 10.3321/j.issn:1001-8360.2005.02.006 [5] LEE S Y, CHENG Y C. Hunting stability analysis of highspeed railway vehicle trucks on tangent tracks[J]. Journal of Sound and Vibration, 2005, 282 (3/4/5): 881-898. [6] CHENG Y C, LEE S Y, CHEN H H. Modeling and nonlinear hunting stability analysis of high-speed railway vehicle moving on curved tracks[J]. Journal of Sound and Vibration, 2009, 324 (1/2): 139-160. [7] GHANEM R, SHINOZUKA M. Structural system identification 1: theory[J]. Journal of Engineering Mechanics, 1995, 121 (2): 255-264. doi: 10.1061/(ASCE)0733-9399(1995)121:2(255) [8] LI Ping, GOODALL R, KADIRKAMANATHAN V. Estimation of parameters in a linear state space model using a Rao-Blackwellised particle filter[J]. IEE Proceedings-Control Theory and Applications, 2004, 151 (6): 727-738. doi: 10.1049/ip-cta:20041008 [9] LI Ping, GOODALL R, WESTON P, et al. Estimation of railway vehicle suspension parameters for condition monitoring[J]. Control Engineering Practice, 2007, 15 (1): 43-55. doi: 10.1016/j.conengprac.2006.02.021 [10] BRUNI S, GOODALL R, MEI T X, et al. Control and monitoring for railway vehicle dynamics[J]. Vehicle System Dynamics, 2007, 45 (7): 743-779. [11] SONG Y, GRIZZLE J W. The extended Kalman filter as a local asymptotic observer for discrete-time nonlinear system[J]. Journal of Mathematical Systems, Estimation and Control, 1995, 5 (1): 59-78. [12] SCHÖN T, GUSTAFSSON F, NORDLUND P. Marginalized particle filters for mixed linear/nonlinear state-space models[J]. IEEE Transactions on Signal Processing, 2005, 53 (7): 2279-2288. doi: 10.1109/TSP.2005.849151 [13] DOUCET A, GORDON N J, KRISHNAMURTHY V. Particle filters for state estimation of jump Markov linear systems[J]. IEEE Transactions on Signal Processing, 2001, 49 (3): 613-624. doi: 10.1109/78.905890 [14] SATRIA M, BEST M C. State estimation of vehicle handling dynamics using non-linear robust extended adaptive Kalman filter[J]. Vehicle System Dynamics, 2004, 41 (S): 103-112. [15] ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50 (2): 174-188. doi: 10.1109/78.978374 -

 下载:
下载:


 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 720
- HTML全文浏览量: 179
- PDF下载量: 783
- 被引次数: 0
