

Integrated optimization model of pedestrian-public transit emergency evacuation
Article Text (Baidu Translation)
-
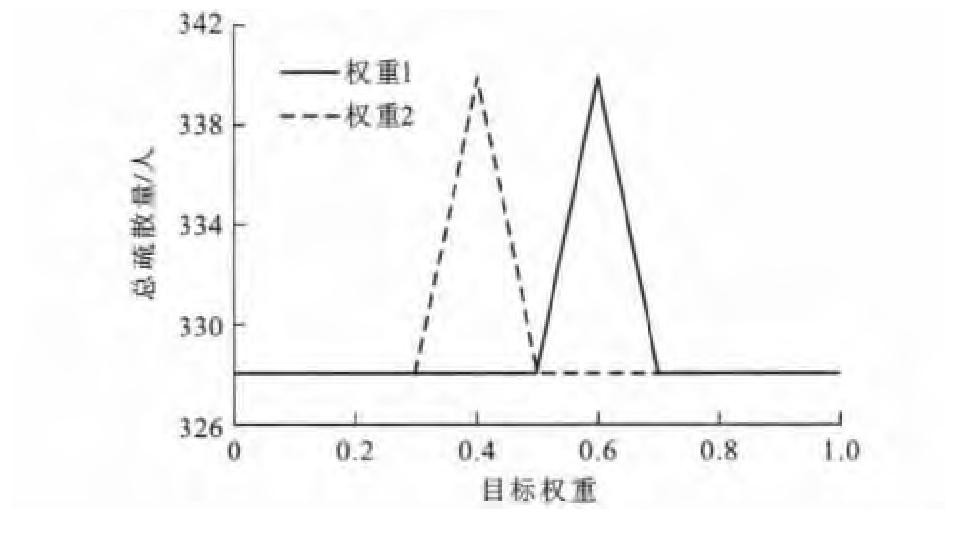
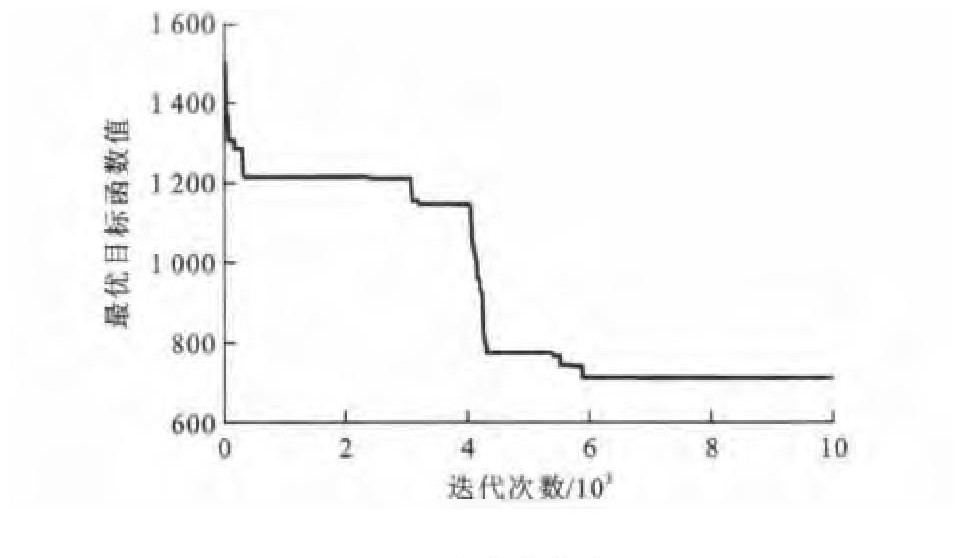
摘要: 针对大型公共场所突发事件提出了运用公共交通进行紧急疏散的集成优化模型。模型将紧急疏散问题抽象为行人交通流和公共交通网络的双层优化网络, 第1层引导撤离人员从事发地点(建筑物等) 到达指定的乘车点(公交站等), 第2层优化公交车从场站出发, 途经各乘车点, 最后运输撤离人员到达安全地点。利用基于禁忌搜索的两阶段启发式算法对模型进行求解和验证。验证结果表明: 在一个有328人需要疏散的网络中, 共使用8辆公交车完成疏散。目标函数中每一项权重的变化对模型输出结果基本没有影响, 模型具有很强的鲁棒性。对比CPLEX优化软件, 启发式算法能够在1h内求解出近似最优解, 并且近似最优解与最优解的误差小于15%。模型充分考虑了撤离人员分配与公交路径优化之间的交互影响, 实现了在紧急疏散时行人交通流与公共交通网络的组织最优。Abstract: Aiming at emergent event in large-scale public, an integrated optimization model of emergency evacuation was developed based on public transit.In the model, the problem of emergency evacuation was summarized as a two-level optimization network including pedestrian traffic flow and public transit network.The first-level framework guided evacuees from accident sites (e.g.buildings) to designated pick-up points (e.g.bus stops).The second-level framework properly dispatched and routed a fleet of buses at different transit depots to the pick-up points, and transported evacuees to safe places finally.Integrated optimization model was tested and verified by using a two-stage heuristic algorithm based on tabu search.Verification result indicates that 8 buses are used for the evacuation of all 328 people in the network.The output result of integrated optimization model is not sensitive to the change of weight assignment of objective function, so the model has strong robustness.Comparing with the optimization software of CPLEX, heuristic algorithm can get near optimum solution in 1 h, and the error between near optimum solution and optimal solution is less than 15%.The interactions betweenevacuees distribution and bus route optimization are fully considered in the model.The pedestrian traffic flow and the public transit network during evacuation process are concurrently optimized.
-
Key words:
- public transit /
- emergent event /
- emergency evacuation /
- pedestrian /
- integrated optimization model /
- tabu search
-
[1] 胡红, 蒋光胜, 杨孝宽, 等. 基于Link-node仿真的北京奥运应急交通疏散预案研究[J]. 北京工业大学学报, 2007, 33 (11): 1187-1192. https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD200711016.htmHU Hong, JIANG Guang-sheng, YANG Xiao-kuan, et al. Study on emergency evacuation plan based on link-node simulation for Beijing Olympics[J]. Journal of Beijing University of Technology, 2007, 33 (11): 1187-1192. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD200711016.htm [2] 姜长杰, 韦献兰. TransCAD与TransModeler在港口突发特大事故应急交通疏散问题方面的研究与应用[J]. 水运工程, 2008 (6): 60-63. https://www.cnki.com.cn/Article/CJFDTOTAL-SYGC200806019.htmJIANG Chang-jie, WEI Xian-lan. Application of TransCAD and TransModeler to research on traffic evacuation for emergency events in port[J]. Port and Waterway Engineering, 2008 (6): 60-63. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SYGC200806019.htm [3] LIU Y, CHANG G L, LAI X, et al. CAPEVACUATION: the corridor-based emergency traffic evacuation system for Washington DC[C]//Intelligent Transportation Society of America. Proceedings of the 14th World Congress on Intelligent Transportation Systems. Beijing: Intelligent Transportation Society of America, 2007: 1-8. [4] LIU Y, CHANG G L, LIU Y, et al. Corridor-based emergency evacuation system for Washington DC: system development and case study[J]. Transportation Research Record, 2008 (2041): 58-67. [5] ELMITINY N, RAMASAMY S, RADWAN E. Emergency evacuation planning and preparedness of transit facilities: traffic simulation modeling[J]. Transportation Research Record, 2007 (1992): 121-126. [6] NAGHAWI H, WOLSHON B. Performance of multi-modal evacuation traffic networks: a simulation based assessment[C]//TRB. Proceedings of the 90th Annual Meeting of Transportation Research Board. Washington DC: TRB, 2011: 1-21. [7] NAGHAWI H, WOLSHON B. Operation of multimodal transport systems during regional mass evacuations[C]//TRB. Proceedings of the 90th Annual Meeting of Transportation Research Board. Washington DC: TRB, 2011: 22-38. [8] MASTROGIANNIDOU C, BOILE M, GOLIAS M, et al. Using transit to evacuate facilities in urban areas: a microsimulation based integrated tool[C]//TRB. Proceedings of the 88th Annual Meeting of Transportation Research Board. Washington DC: TRB, 2009: 1-15. [9] PERKINS J A, DABIPI I K, HAN L D. Modeling transit issues unique to hurricane evacuations: North Carolina's small urban and rural areas[R]. Greensboro: North Carolina A & amp; amp; T State University, 2001. [10] SAYYADY F. Optimizing the use of public transit system in no-notice evacuations in urban areas[D]. Starkville: Mississippi State University, 2007. [11] SAYYADY F, EKSIOGLU S D. Optimizing the use of public transit system during no-notice evacuation of urban areas[J]. Computers and Industrial Engineering, 2010, 59 (4): 488-495. doi: 10.1016/j.cie.2010.06.001 [12] EKSIOGLU B, VURAL A V, REISMAN A. The vehicle routing problem: a taxonomic review[J]. Computers and Industrial Engineering, 2009, 57 (4): 1472-1483. doi: 10.1016/j.cie.2009.05.009 [13] MARGULIS L, CHAROSKY P, FERNANDEZ J, et al. Hurricane evacuation decision-support model for bus dispatch[C]//LACCEI. The Fourth LACCEI International Latin American and Caribbean Conference for Engineering and Technology. Mayaguez: LACCEI, 2006: 1-9. [14] HE S, ZHANG L, SONG R, et al. Optimal transit routing problem for emergency evacuations[C]//TRB. Proceedings of the 88th Annual Meeting of Transportation Research Board. Washington DC: TRB, 2009: 32-45. [15] CHEN C C, CHOU C S. Modeling and performance assessment of a transit-based evacuation plan within a contraflow simulation environment[J]. Transportation Research Record, 2009 (2091): 40-50. [16] CHAN C P. Large scale evacuation of carless people during short-and long-notice emergency[D]. Tucson: The University of Arizona, 2010. [17] 滕靖, 徐瑞华. 城市轨道交通突发事件下公交应急联动策略[J]. 铁道学报, 2010, 32 (5): 13-17. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201005003.htmTENG Jing, XU Rui-hua. Bus dispatching strategies in urban rail emergent events[J]. Journal of the China Railway Society, 2010, 32 (5): 13-17. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201005003.htm [18] 王泽. 台风灾害下区域疏散公交集结点选址和车辆路径规划[D]. 哈尔滨: 哈尔滨工业大学, 2010.WANG Ze. Public transit assembly stations location and vehicle routing plans for regional evacuation under the typhoon disaster[D]. Harbin: Harbin Institute of Technology, 2010. (in Chinese). [19] 徐梁, 宋瑞. 自然灾害下的公交疏散路线模型[J]. 物流技术, 2011, 30 (6): 147-150, 154. https://www.cnki.com.cn/Article/CJFDTOTAL-WLJS201111046.htmXU Liang, SONG Rui. Bus evacuation route model in event of natural disaster[J]. Logistics Technology, 2011, 30 (6): 147-150, 154. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WLJS201111046.htm [20] LIAO Fei-xiong, ARENTZE T, TIMMERMANS H. Multistate supernetworks: recent progress and prospects[J]. Journal of Traffic and Transportation Engineering: English Edition, 2014, 1 (1): 13-27. doi: 10.1016/S2095-7564(15)30085-4 [21] CHAPMAN J R, NOYCE D A. Influence of roadway geometric elements on driver behavior when overtaking bicycles on rural roads[J]. Journal of Traffic and Transportation Engineering: English Edition, 2014, 1 (1): 28-38. -

 下载:
下载:











 点击查看大图
点击查看大图

图(5) / 表(9)
计量
- 文章访问数: 774
- HTML全文浏览量: 114
- PDF下载量: 758
- 被引次数: 0
