

Control method of underactuated surface ship formation based on stable adaptive neural network control law
Article Text (Baidu Translation)
-
摘要: 考虑具有不确定动态和外界环境干扰的欠驱动水面船舶编队控制问题, 提出一种基于领导/跟随和目标跟踪机制的神经网络稳定自适应控制方法。基于目标跟踪误差设计了运动学跟踪控制器, 推导出跟踪误差的动力学方程, 并利用自适应神经网络估计动力学方程中的不确定项, 构造了神经网络稳定自适应动力学跟踪控制器。应用Lyapunov稳定性理论和串接系统稳定性定理设计了船舶控制器, 并计算了自适应律, 在线调整神经网络权值, 保证编队控制闭环系统跟踪误差一致最终有界。以3艘船舶组成的编队为例, 对控制方法进行了仿真验证。在曲率半径为3倍船长的圆形跟踪路径上, 转向角误差小于15°, 队形跟踪误差的F-范数小于1m;在直线跟踪路径上, 转向角误差小于1°, 队形跟踪误差F-范数小于0.1m。Abstract: Considering the control problems of underactuated surface ship formation with uncertain dynamics and external environment disturbances, a stable adaptive neural network control method was proposed based on leader/follower method and target tracking mechanism.A kinematics formation tracking controller was presented based on target tracking error, the dynamics equations of tracking error were derived, adaptive neural network was used to estimate the uncertainties of dynamics equations, and a stable adaptive neural network dynamics tracking controller was constructed.The Lyapunov stability theory and the series-system stability theory were used to design ship control laws and calculate ship adaptive laws so as to online adjust the weights of neural network and ensure the formation tracking error of closed loop system uniformly ultimately bounded.The formation with three ships was as an example, and the control method was tested.On circular tracking path with the radius of curvature of three times of hull length, the steering angle error is less than 15°, and the F-norm of formation trackingerror is less than 1 m. On straight tracking path, the steering angle error is less than 1°, and the F-norm of formation tracking error is less than 0.1 m.Obviously, the method is reliable.
-

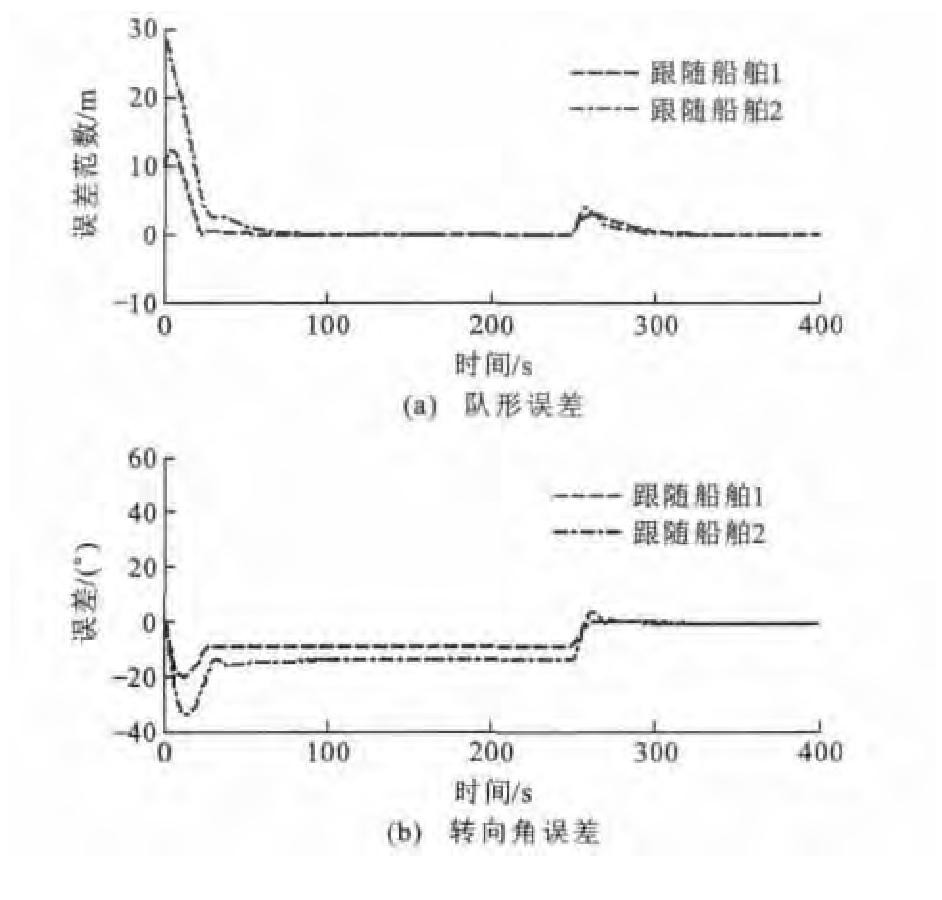
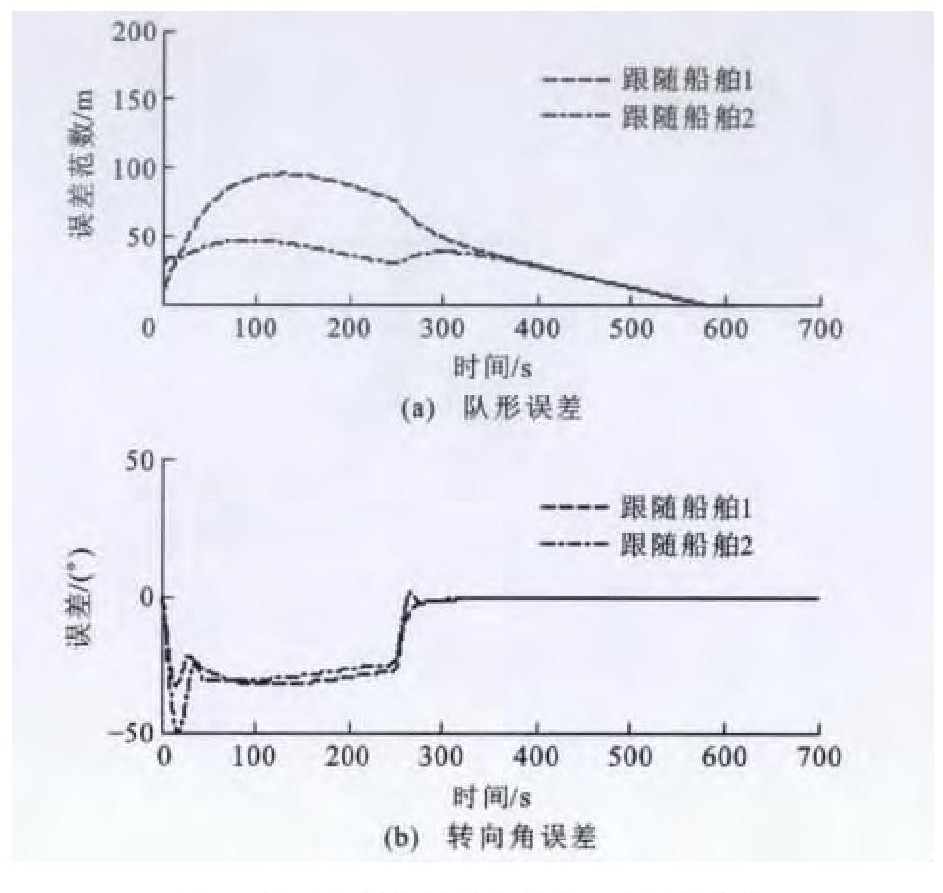
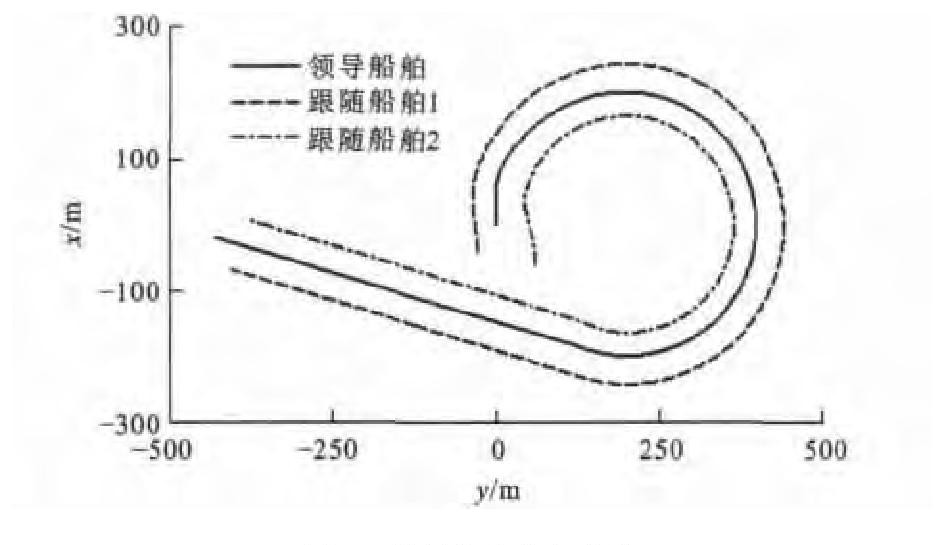
图 3 基于比较控制器的船舶跟踪误差曲线
Figure 3. Tracking error curves of ships based on comparing controller
-
[1] BALCH T, ARKIN R C. Behavior-based formation control for multi-robot teams[J]. IEEE Transactions on Robotics and Automation, 1998, 14 (6): 926-939. doi: 10.1109/70.736776 [2] 袁健, 唐功友. 采用一致性算法与虚拟结构的多自主水下航行器编队控制[J]. 智能系统学报, 2011, 6 (3): 248-253. doi: 10.3969/j.issn.1673-4785.2011.03.009YUAN Jian, TANG Gong-you. Formation control of autonomous underwater vehicles with consensus algorithms and virtual structure[J]. CAAI Transactions on Intelligent Systems, 2011, 6 (3): 248-253. (in Chinese). doi: 10.3969/j.issn.1673-4785.2011.03.009 [3] 何真, 陆宇平, 刘燕斌. 基于虚拟结构的分布式编队控制方法[J]. 应用科学学报, 2007, 25 (4): 387-391. doi: 10.3969/j.issn.0255-8297.2007.04.011HE Zhen, LU Yu-ping, LIU Yan-bin. Distributed control of formation maneuvers based on virtual structures[J]. Journal of Applied Sciences, 2007, 25 (4): 387-391. (in Chinese). doi: 10.3969/j.issn.0255-8297.2007.04.011 [4] SHEIKHOLESLAM S, DESOER C A. Control of interconnected nonlinear dynamical systems: the platoon problem[J]. IEEE Transactions on Automatic Control, 1992, 37 (6): 806-810. doi: 10.1109/9.256337 [5] TAKAHASHI H, NISHI H, OHNISHI K. Autonomous decentralized control for formation of multiple mobile robots considering ability of robot[J]. IEEE Transactions on Industrial Electronics, 2004, 51 (6): 1272-1279. doi: 10.1109/TIE.2004.837848 [6] CONSOLINI L, MORBIDI F, PRATTICHIZZO D. Leaderfollower formation control of nonholonomic mobile robots with input constraints[J]. Automatica, 2008, 44 (5): 1343-1349. doi: 10.1016/j.automatica.2007.09.019 [7] 吴孔逸, 霍伟. 不确定移动机器人编队间接自适应模糊动力学控制[J]. 控制与决策, 2010, 25 (12): 1769-1774, 1781. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201012003.htmWU Kong-yi, HUO Wei. Indirect adaptive fuzzy dynamical formation control of uncertain mobile robots[J]. Control and Decision, 2010, 25 (12): 1769-1774, 1781. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201012003.htm [8] DO K D, JIANG Z P, PAN J. Robust adaptive path following of underactuated ships[J]. Automatica, 2004, 40 (6): 929-944. doi: 10.1016/j.automatica.2004.01.021 [9] 刘杨, 郭晨, 沈智鹏, 等. 欠驱动船舶路径跟踪的神经网络稳定自适应控制[J]. 控制理论与应用, 2010, 27 (2): 169-174. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201002010.htmLIU Yang, GUO Chen, SHEN Zhi-peng, et al, Stable adaptive neural network control of path following for underactuated ships[J]. Control Theory and Applications, 2010, 27 (2): 169-174. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201002010.htm [10] LIU Yang, GUO Chen. Trajectory tracking control for underactuated surface vessels using neural network[J]. Journal of Central South University: Science and Technology, 2011, 42 (S1): 32-35. [11] BREIVIK M. Topics in guided motion control of marine vehicles[D]. Trondheim: Norwegian University of Science and Technology, 2010. [12] CUI R X, GE S S, HOW B V E, et al. Leader-follower formation control of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2010, 37 (17/18): 1491-1502. [13] PENG Z, WANG D, HU X. Robust adaptive formation control of underactuated autonomous surface vehicles with uncertain dynamics[J]. IET Control Theory and Applications, 2011, 5 (12): 1378-1387. [14] 丁磊, 郭戈. 一种编队控制的Backstepping方法[J]. 控制与决策, 2012, 27 (2): 299-303. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201202027.htmDING Lei, GUO Ge. Formation control for ship fleet based on backstepping[J]. Control and Decision, 2012, 27 (2): 299-303. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201202027.htm [15] 刘杨. 欠驱动水面船舶的非线性自适应控制研究[D]. 大连: 大连海事大学, 2010.LIU Yang. The nonlinear adaptive control for underactuated surface vessels[D]. Dlian: Dalian Maritime University, 2010. (in Chinese). -

 下载:
下载:




 点击查看大图
点击查看大图
图(3) / 表(4)
计量
- 文章访问数: 654
- HTML全文浏览量: 127
- PDF下载量: 759
- 被引次数: 0
