

Control law design of dynamic positioning for ship based on dynamic surface control
Article Text (Baidu Translation)
-
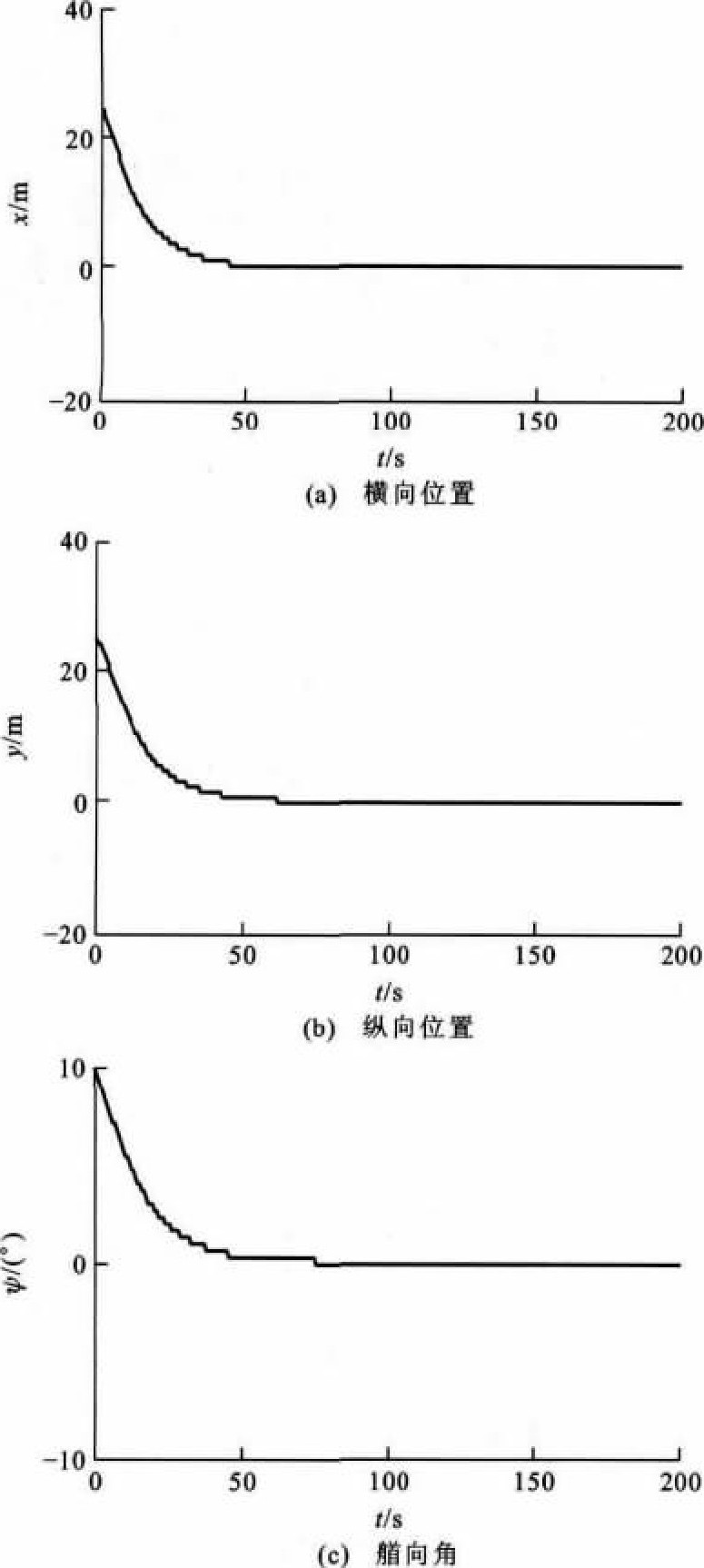
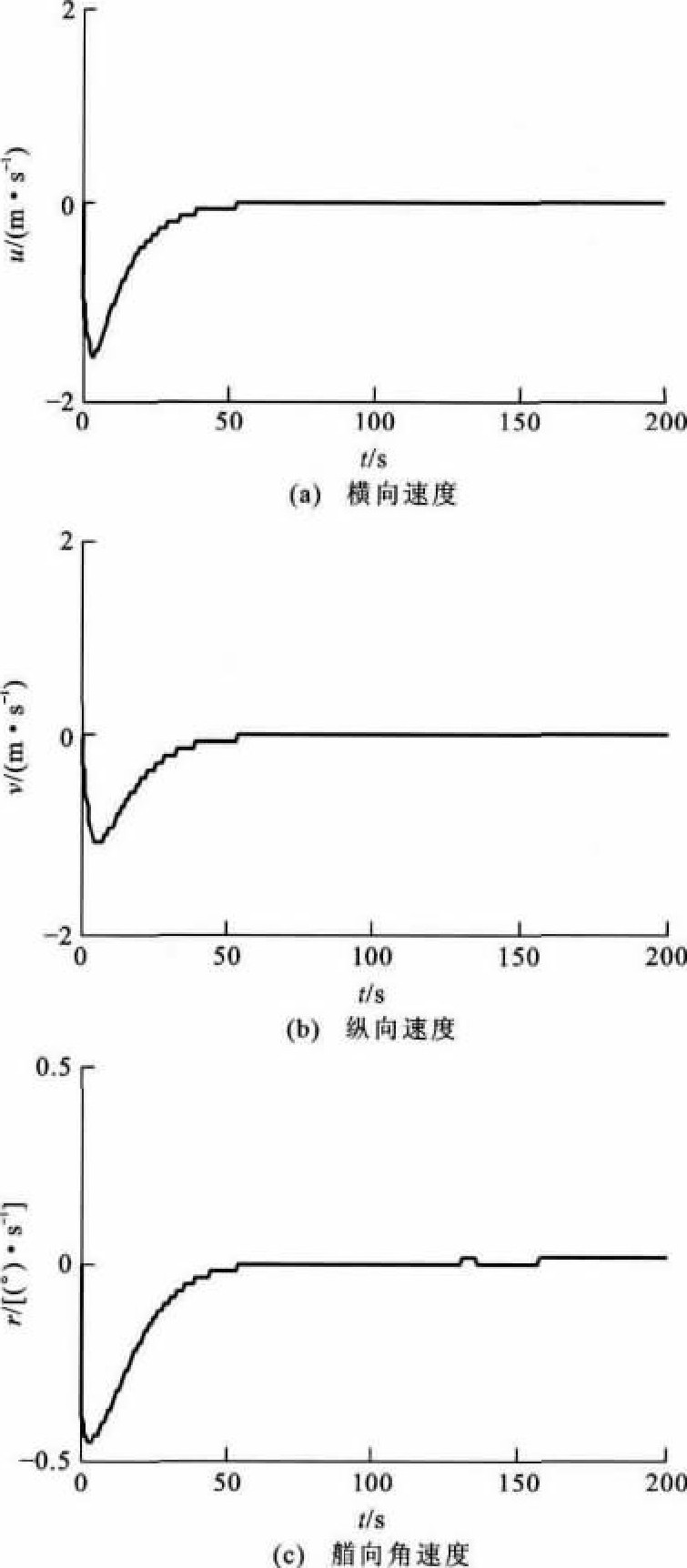
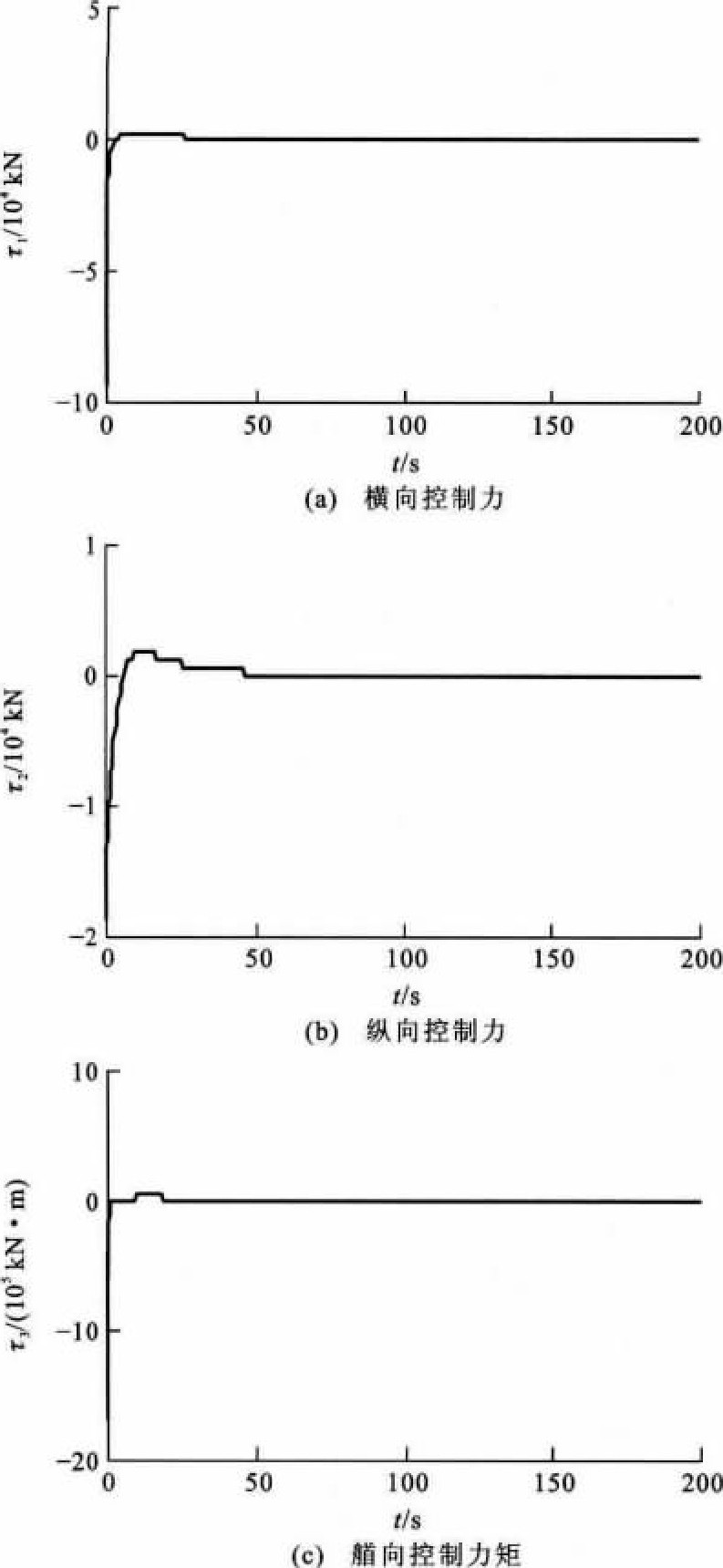
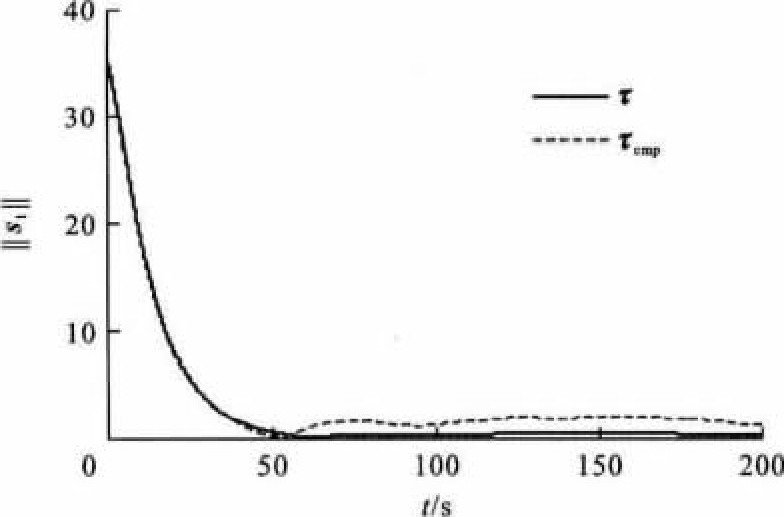
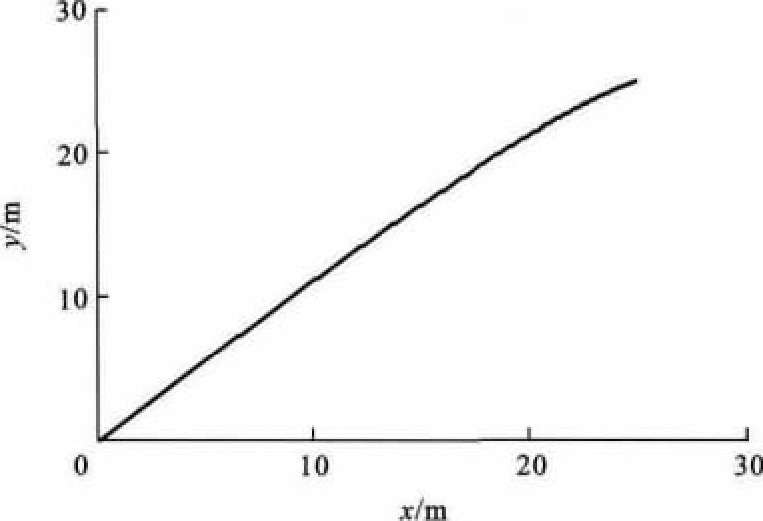
摘要: 针对水面船舶动力定位控制问题, 考虑带有未知界的时变环境扰动, 将动态面控制技术与矢量逆推方法相结合, 设计了船舶动力定位系统的自适应鲁棒非线性控制律。引入动态面控制技术, 利用一阶滤波器的微分项代替虚拟控制矢量的微分项, 使得在控制律设计过程中的微分运算被简单的代数运算所替代, 简化了计算, 易于工程实现。为阻止自适应参数漂移, 采用包含基于σ-修正泄漏项的自适应律估计未知扰动的界。应用Lyapunov函数证明了所设计的控制律能迫使船舶的位置和艏向角达到并保持在期望值, 保证船舶动力定位闭环系统中所有信号最终一致有界。仿真结果表明: 在水平面上, 当船舶初始位置偏离期望位置25m时, 利用设计的控制律能迫使船舶在50s内达到期望的目标位置, 因此, 所设计的控制律是有效的。Abstract: The control problem of dynamic positioning for surface ship was analyzed, the timevariant environmental disturbances with unknown bounds were considered, the dynamic surface control technology was combined with the vectorial backstepping method, based on which, an adaptive robust nonlinear control law of dynamic positioning was proposed.By introducing the dynamic surface control technique, the proposed control law utilized the differentiation term of the first-order low-pass filter to replace the differentiation term of virtual control vector.As a result, the differentiation operations in the control law design were replaced by the simple algebraic operations.Hence, the control law simplified the computation and was implemented in engineering practice easily.Leakage terms based on a variation of σ-modification were incorporated into the adaptive laws for estimating the unknown bounds of disturbances to prevent parameters from drifting.By using the Lyapunov function, it was proved that the proposed control law could force the ship's position and heading to converge and keep at the desired target values and guarantee the uniformly ultimate boundedness of all signals in the closed-loop dynamic positioning system of ship.Simulation result shows that as the initial horizontal-plane position of ship deviates 25 m from the desired position, the ship can achieve the desired position within 50 sbased on the control law, so the proposed control law is effective.
-

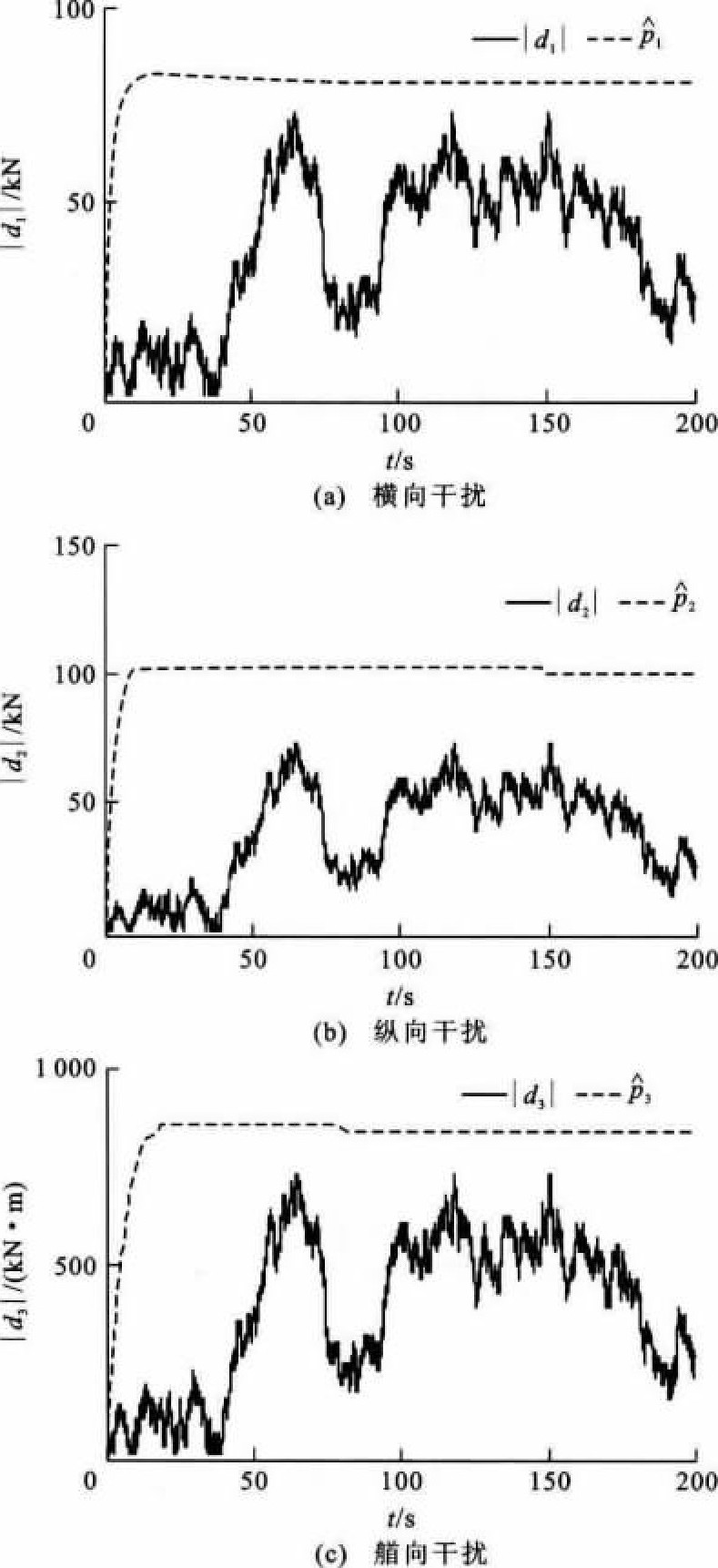
图 5 扰动分量绝对值及其界的估计曲线
Figure 5. Curves of absolute values of external disturbances and their thresholds' estimation values
-
[1] SΦRENSEN A J. A survey of dynamic positioning control systems[J]. Annual Reviews in Control, 2011, 35 (1): 123-136. doi: 10.1016/j.arcontrol.2011.03.008 [2] STRAND J P, SØRENSEN A J, RONSS M, et al. The Ocean Engineering Handbook[M]. Boca Raton: CRC Press, 2001. [3] FOSSEN T I. Marine Control Systems: Guidance, Navigation, and Control of Ships, Rigs, and Underwater Vehicles[M]. Trondheim: Marine Cybernetics, 2002. [4] GRØVLENÅ, FOSSEN T I. Nonlinear control of dynamic positioned ships using only position feedback: an observer backstepping approach[C]//IEEE. Proceedings of the 35th IEEE Conference Decision and Control. Kobe: IEEE, 1996: 3388-3393. [5] FOSSEN T I, GRØVLENÅ. Nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping[J]. IEEE Transactions on Control Systems Technology, 1998, 6 (1): 121-128. doi: 10.1109/87.654882 [6] 王元慧, 隋玉峰, 吴静. 基于非线性模型预测的船舶动力定位控制器设计[J]. 哈尔滨工程大学学报, 2013, 34 (1): 110-115. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201301019.htmWANG Yuan-hui, SUI Yu-feng, WU Jing. Marine dynamic position system based on nonlinear model predictive control[J]. Journal of Harbin Engineering University, 2013, 34 (1): 110-115. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201301019.htm [7] 杜佳璐, 李文华, 郑凯, 等. 船舶动力定位系统的非线性输出反馈控制[J]. 华南理工大学学报: 自然科学版, 2012, 40 (2): 70-75, 91. doi: 10.3969/j.issn.1000-565X.2012.02.013DU Jia-lu, LI Wen-hua, ZHENG Kai, et al. Nonlinear output feedback control of dynamic positioning system of ships[J]. Journal of South China University of Technology: Natural Science Edition, 2012, 40 (2): 70-75, 91. (in Chinese). doi: 10.3969/j.issn.1000-565X.2012.02.013 [8] MUHAMMAD S, DORIA-CEREZO A. Passivity-based control applied to the dynamic positioning of ships[J]. IET Control Theory and Applications, 2012, 6 (5): 680-688. doi: 10.1049/iet-cta.2010.0554 [9] DO K D. Global robust and adaptive output feedback dynamic positioning of surface ships[J]. Journal of Marine of Science and Application, 2011, 10 (3): 325-332. doi: 10.1007/s11804-011-1076-z [10] FOSSEN T I, STRAND J P. Passive nonlinear observer design for ships using Lyapunov methods: full-scale experiments results with a supply vessel[J]. Automatica, 1999, 35 (1): 3-16. doi: 10.1016/S0005-1098(98)00121-6 [11] LORIA A, FOSSEN T I, PANTELEY E. A separation principle for dynamic positioning of ships: theoretical and experimental results[J]. IEEE Transactions on Control Systems Technology, 2000, 8 (2): 332-343. doi: 10.1109/87.826804 [12] 赵大威, 边信黔, 丁福光. 非线性船舶动力定位控制器设计[J]. 哈尔滨工程大学学报, 2011, 32 (1): 57-61. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201301019.htmZHAO Da-wei, BIAN Xin-qian, DING Fu-guang. Design of a nonlinear controller for dynamic ship positioning[J]. Journal of Harbin Engineering University, 2011, 32 (1): 57-61. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201301019.htm [13] SWAROOP D, HEDRICK J K, YIP P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2000, 45 (10): 1893-1899. [14] POLYCARPOU M M, IOANNOU P A. A robust adaptive nonlinear control design[J]. Automatica, 1996, 32 (3): 423-427. [15] DING Fu-guang, WANG Yuan-hui, TAN Jin-feng. Application of nonlinear filter on the position estimation of dynamic positioned ship[C]//IEEE. Proceedings of the 8th World Congress on Intelligent Control and Automation. Taibei: IEEE, 2011: 1071-1074. -

 下载:
下载:


 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 928
- HTML全文浏览量: 151
- PDF下载量: 807
- 被引次数: 0
