

Lane line detection method based on orientation variance Haar feature and hyperbolic model
Article Text (Baidu Translation)
-
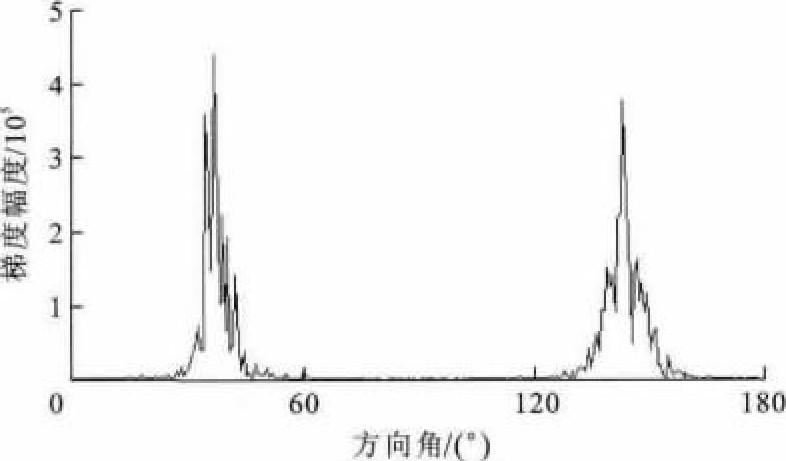
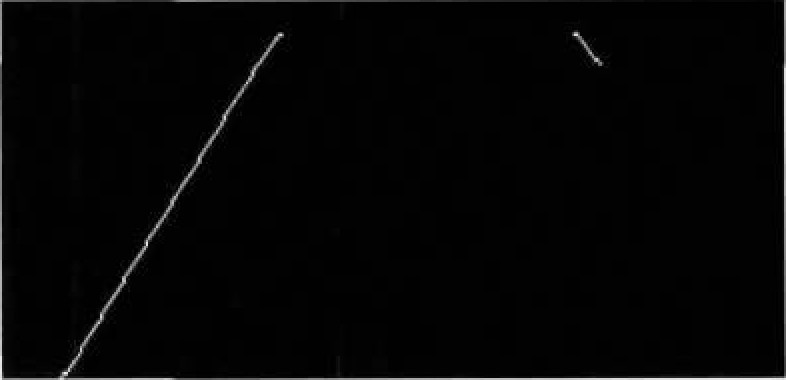
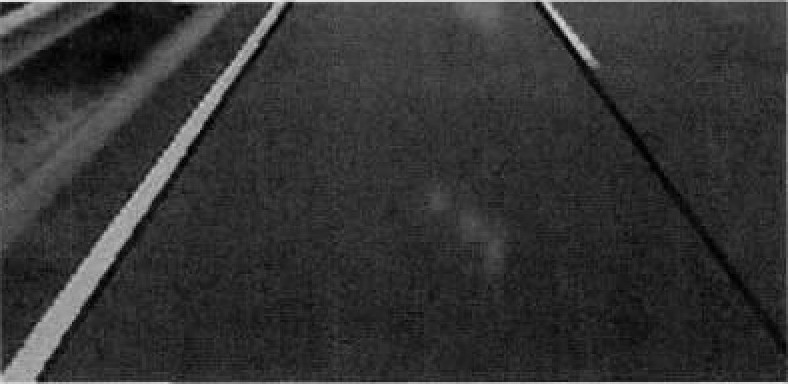
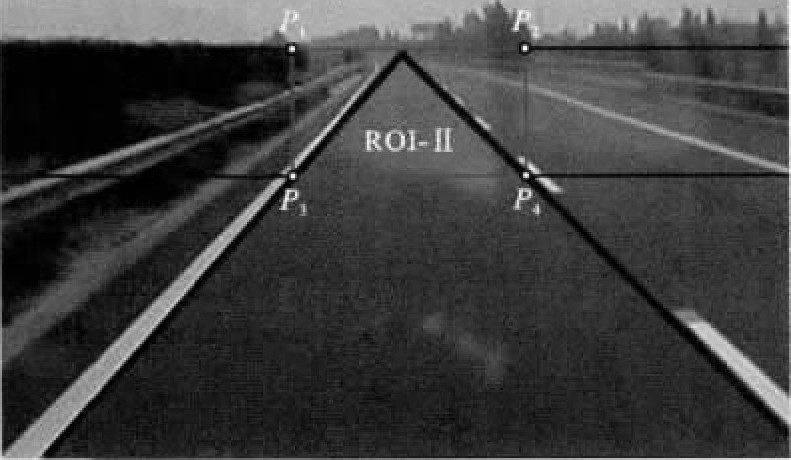
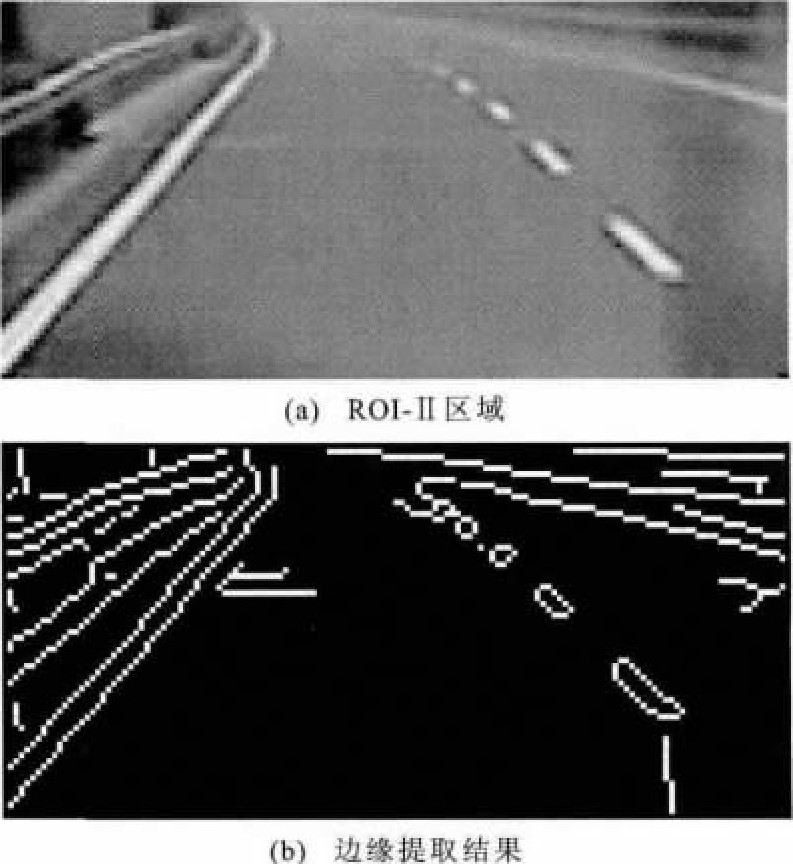
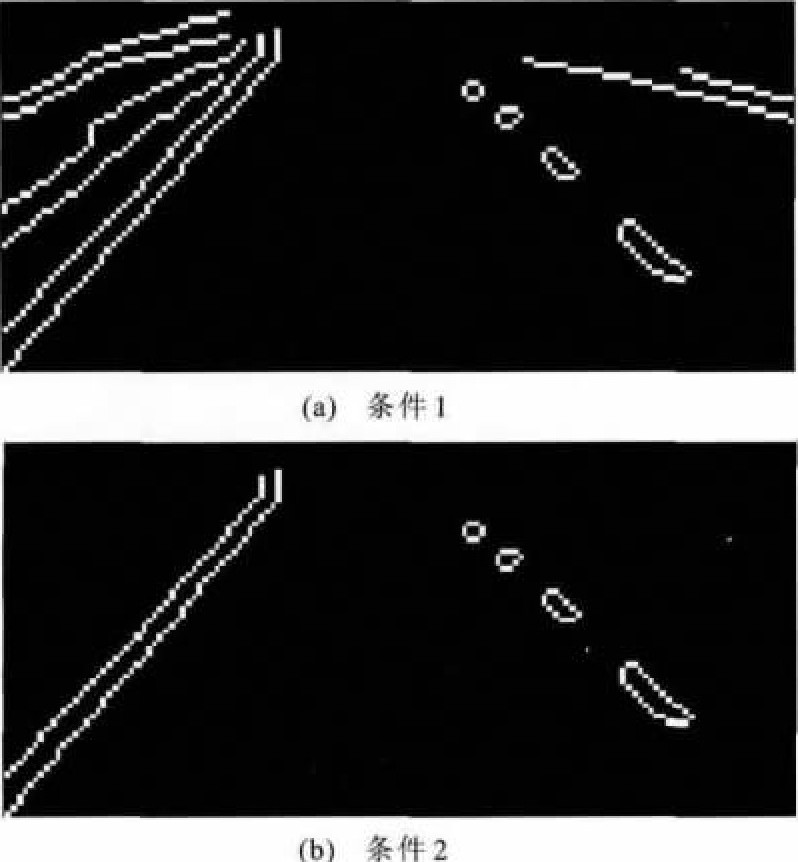
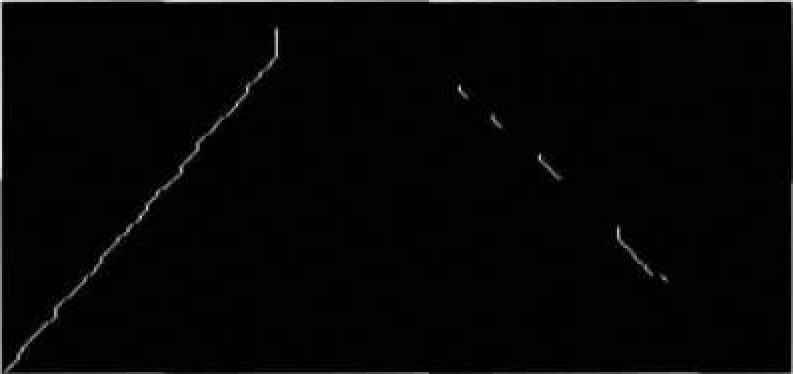
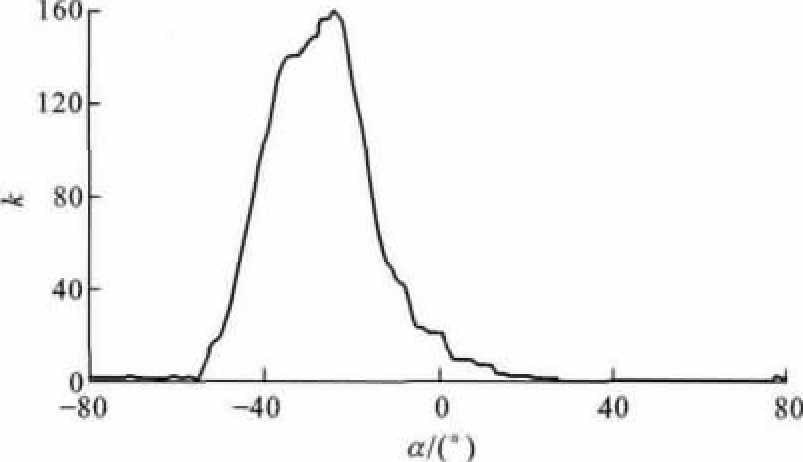
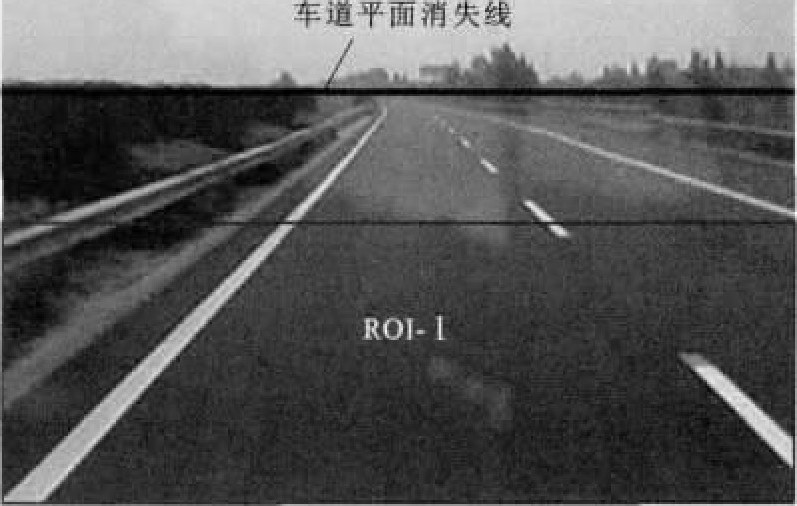
摘要: 针对快速路车道线易受多种因素影响而较难检测的问题, 提出了一种基于方向可变Haar特征和双曲线模型的分布式车道线检测方法。首先对车载摄像头进行标定, 确定图像中车道平面消失线的位置, 将车道平面消失线以下部分的下2/3区域作为感兴趣区域Ⅰ。利用边缘分布函数获得感兴趣区域Ⅰ内车道线直线模型倾角, 再采用方向可变Haar特征提取边缘特征点并拟合车道线直线模型, 利用直线模型参数进一步确定感兴趣区域Ⅱ。提出一种单方向搜索算法, 提取边缘特征点并利用双曲线模型拟合获取完整的车道线模型。通过约10 000幅实际道路图片对车道线检测方法进行验证。验证结果表明: 检测方法能很好地实现多种环境下的车道线检测, 在晴好天气检测率为99.9%, 不良天气检测率为99.7%。
-
关键词:
- 车道线检测 /
- 方向可变Haar特征 /
- 边缘分布函数 /
- 单方向搜索算法 /
- 双曲线模型
Abstract: In order to solve the problem that expressway lane lines were easily affected by many factors, which made them hard to be detected, a distributed lane line detection method based on orientation variance Haar feature and hyperbolic model was proposed.In order to get the disappearing line of lane plane in the image, the camera was calibrated firstly.Then, the lower 2/3 zone below the disappearing line was segmented as the region of interestⅠ (ROI-Ⅰ).The dip angle of straight line model of lane line in ROI-Ⅰ was obtained by using edge distribution function.Then the feature points of lane line edge were got by using orientation variance Haar feature, and the straight line model of lane line was fitted.The region of interestⅡ (ROI-Ⅱ) was determined by using the parameters of straight line model.A single direction search algorithm was proposed to get edge feature points.Full lane line model was obtained by using hyperbolic model.The lane line detection method was verified by using about 10 000 actual road images.Verification result indicates that lane line detection in a variety of conditions can beachieved well, the detection rate in fair weather condition is 99.9%, and the detection rate in bad weather condition is 99.7%. -

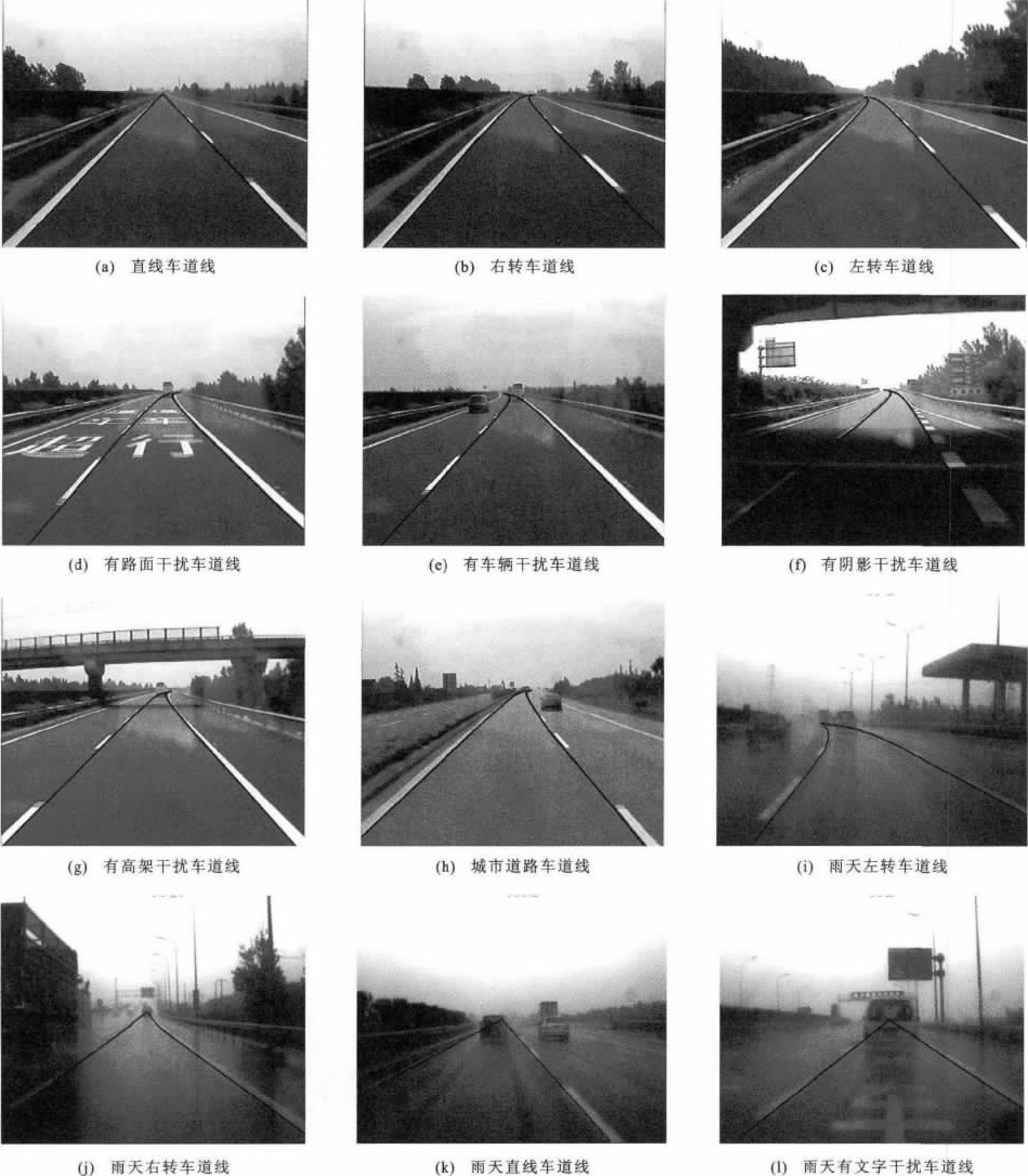
图 12 多种路况下的车道线检测结果
Figure 12. Lane line detection result under multiple road conditions
-
[1] BARICKMAN F S, SMITH L, JONES R. Lane departure warning system research and test development[C]//ESV. Proceedings of the 20th International Technical Conference on the Enhanced Safety of Vehicles. Lyon: ESV, 2007: 1-8. [2] JUNG H, MIN J, KIM J. An efficient lane detection algorithm for lane departure detection[C]//IEEE. 2013IEEE Intelligent Vehicles Symposium. Gold Coast: IEEE, 2013: 976-981. [3] MEI T, LIANG H, KONG B, et al. Development of'Intelligent Pioneer'unmanned vehicle[C]//IEEE. 2012IEEE Intelligent Vehicles Symposium. Madrid: IEEE, 2012: 938-943. [4] MASTORAKIS G, DAVIES E R. Improved line detection algorithm for locating road lane markings[J]. Electronics Letters, 2011, 47 (3): 183-184. doi: 10.1049/el.2010.2178 [5] MCCALL J C, TRIVEDI M M. Video-based lane estimation and tracking for driver assistance: survey, system, and evaluation[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7 (1): 20-37. doi: 10.1109/TITS.2006.869595 [6] CHENG H Y, JENG B S, TSENG P T, et al. Lane detection with moving vehicles in the traffic scenes[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7 (4): 571-582. doi: 10.1109/TITS.2006.883940 [7] SOUTHALL B, BANSAL M, ELEDATH J. Real-time vehicle detection for highway driving[C]//IEEE. 2009IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Miami: IEEE, 2009: 541-548. [8] GOPALAN R, HONG T, SHNEIER M, et al. A learning approach towards detection and tracking of lane markings[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13 (3): 1088-1098. doi: 10.1109/TITS.2012.2184756 [9] LEE J W, CHO J S. Effective lane detection and tracking method using statistical modeling of color and lane edge-orientation[C]//IEEE. The 2009Fourth International Conference on Computer Sciences and Convergence Information Technology. Seoul: IEEE, 2009: 1586-1591. [10] LI Hao, NASHASHIBI F. Robust real-time lane detection based on lane mark segment features and general a priori knowledge[C]//IEEE. Proceeding of the 2011IEEE International Conference on Robotics and Biomimetics. Phuket: IEEE, 2011: 812-817. [11] 高德芝, 段建民, 杨磊, 等. 应用多阶动态规划的车道线识别方法[J]. 机械工程学报, 2011, 47 (8): 141-145. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201108025.htmGAO De-zhi, DUAN Jian-min, YANG Lei, et al. Lane recognition method using multi-stage dynamic programming[J]. Journal of Mechanical Engineering, 2011, 47 (8): 141-145. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201108025.htm [12] 林国余, 陈旭, 张为公. 基于多信息融合优化的鲁棒性车道检测算法[J]. 东南大学学报: 自然科学版, 2010, 40 (4): 771-777. doi: 10.3969/j.issn.1001-0505.2010.04.021LIN Guo-yu, CHEN Xu, ZHANG Wei-gong. Robust lane detection algorithm based on multiple information fusion and optimizations[J]. Journal of Southeast University: Natural Science Edition, 2010, 40 (4): 771-777. (in Chinese). doi: 10.3969/j.issn.1001-0505.2010.04.021 [13] 陈勇, 黄席樾, 唐高友, 等. 基于机器视觉的车道检测与二维重建方法[J]. 仪器仪表学报, 2007, 28 (7): 1205-1210. doi: 10.3321/j.issn:0254-3087.2007.07.010CHEN Yong, HUANG Xi-yue, TANG Gao-you, et al. Lane detection and two dimensional rebuilding based on machine vision[J]. Chinese Journal of Scientific Instrument, 2007, 28 (7): 1205-1210. (in Chinese). doi: 10.3321/j.issn:0254-3087.2007.07.010 [14] ZHANG Fei-hu, STAHLE H, CHEN Chao, et al. A lane marking extraction approach based on random finite set statistics[C]//IEEE. 2013IEEE Intelligent Vehicles Symposium. Gold Coast: IEEE, 2013: 1143-1148. [15] ZHANG Z. A flexible camera calibration by viewing aplane from unknown orientations[C]//IEEE. 1999IEEE International Conference on Computer Vision. Kerkyra: IEEE, 1999: 666-673. [16] KLUGE K. Extracting road curvature and orientation from image edge points without perceptual grouping into features[C]//IEEE. 1994IEEE Intelligent Vehicles Symposium. Paris: IEEE, 1994: 109-114. -

 下载:
下载:



 点击查看大图
点击查看大图
图(12) / 表(2)
计量
- 文章访问数: 658
- HTML全文浏览量: 169
- PDF下载量: 1383
- 被引次数: 0
