

Model of real-time pedestrian detection under vehicle environment based on CS-SD
Article Text (Baidu Translation)
-
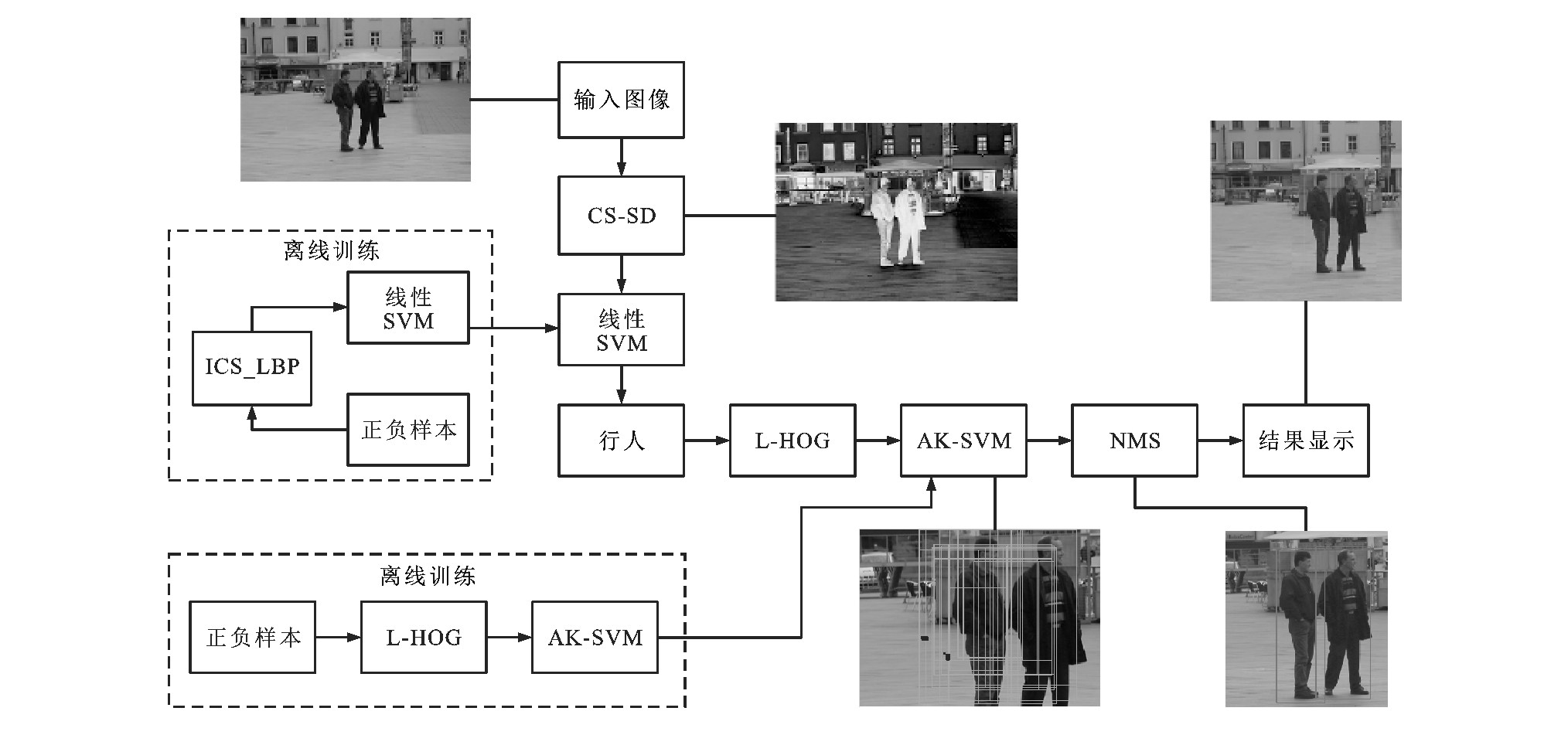
摘要: 针对车辆辅助驾驶系统中行人检测的实时性问题, 提出一种基于路面边缘线标定结合显著性纹理检测(CS-SD) 的算法和定位方向梯度直方图(L-HOG) 的行人检测模型, 应用CS-SD算法替代穷尽搜索快速标定图像中的行人区域, 应用L-HOG快速提取行人特征, 并采用附加核心的支持向量机(AK-SVM) 进行高效目标分类。分析结果表明: 在个人计算机上对包含832个行人的500幅图像进行检测时, 模型正确检测720个行人, 检测率为86.5%, 误检率为4.1%, 检测时间为39ms; 在基于BF609的车载行人检测系统上对包含988个行人的48 400幅图像进行检测时, 模型正确检测861个行人, 漏检127个行人, 误检13个行人, 检测速度为20fps。可见, 提出的行人检测模型在不降低检测率的前提下, 可以达到满意的检测速度, 并且可以用于实时行人检测车载设备。Abstract: In order to solve the real-time problem in the advanced driver assistant system, a model of pedestrian detection based on the calibration of side-of-pavement line and saliency texture detection (CS-SD) and the location histogram of oriented gradient (L-HOG) was proposed.The CS-SD algorithm was used instead of exhaustive search to quickly mark pedestrian area in the image.The L-HOG was used to quickly extract pedestrian feature, and additive kernel support vector machine (AK-SVM) was used to efficiently classify detected objects.Analysis result shows that when 500 images including 832 pedestrians on personal computer are detected, the model detects 720 pedestrians correctly, the detection rate is 86.5%, the error rate is 4.1%, and the detection time is 39 ms.When 48 400 images including 988 pedestrians on vehicle pedestrian detection system based on BF609 are detected, the model detects 861 pedestrians correctly, misses 127 pedestrians and detects 13 pedestrians in error.The detection speed is 20 fps.Underthe premise of not reducing the detection rate, the proposed pedestrian detection model can reach satisfying detection speed and can be used in vehicle equipment of real-time pedestrian detection.
-

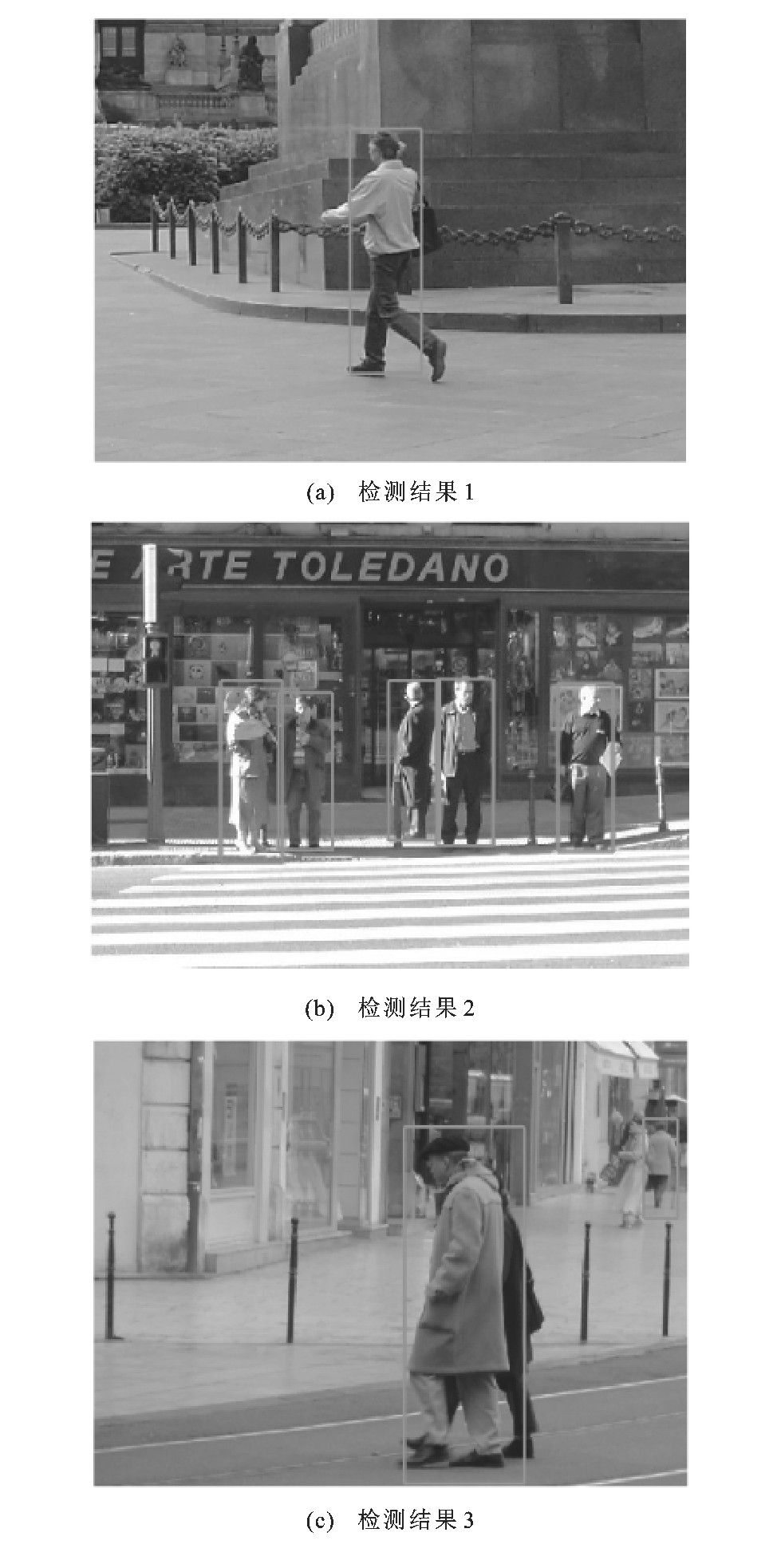
图 6 INRIA行人数据库的部分检测结果
Figure 6. Partial detection results of INRIA pedestrian database

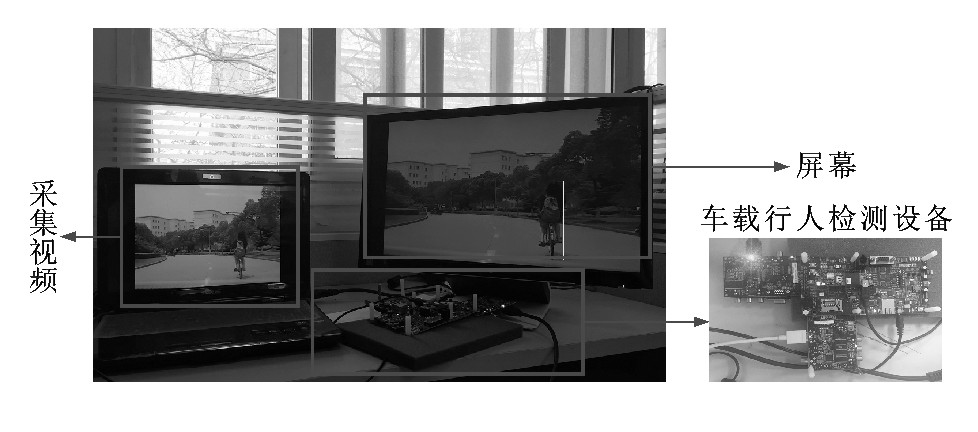
图 8 车载行人检测系统的部分检测结果
Figure 8. Partial detection results of vehicle pedestrian detection system
表 4 车载行人检测系统的处理时间分布
Table 4. Processing time distribution of vehicle pedestrian detection system

 下载: 导出CSV
下载: 导出CSV
-
[1] BENENSON R, OMRAN M, HOSANG J, et al. Ten years of pedestrian detection, what have we learned?[J]. Lecture Notes in Computer Science, 2015, 8926: 613-627. [2] DIXIT R S, GANDHE S T. Pedestrian detection system for ADAS using Friendly ARM[C]//IEEE. 2015International Conference on Energy Systems and Applications. New York: IEEE, 2015: 557-560. [3] GERÓNIMO D, LÓPEZ A M, SAPPA A D, et al. Survey of pedestrian detection for advanced driver assistance systems[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(7): 1239-1258. doi: 10.1109/TPAMI.2009.122 [4] HAJEK W, GAPONOVA I, FLEISCHER K H, et al. Workloadadaptive cruise control—a new generation of advanced driver assistance systems[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2013, 20: 108-120. doi: 10.1016/j.trf.2013.06.001 [5] DALAL N, TRIGGS B. Histograms of oriented gradients for human detection[C]//IEEE. 2005IEEE Computer Society Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2005: 886-893. [6] WANG Xiao-yu, HAN T X, YAN Shui-cheng. An HOGLBP human detector with partial occlusion handling[C]//IEEE. 2009 IEEE International Conference on Computer Vision. New York: IEEE, 2009: 32-39. [7] FELZENSZWALB P, GIRSHICK R, MCALLESTER D, et al. Visual object detection with deformable part models[J]. Communications of the ACM, 2013, 56(9): 97-105. doi: 10.1145/2494532 [8] FELZENSZWALB P F, GIRSHICK R B, MCALLESTER D, et al. Object detection with discriminatively trained partbased models[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(9): 1627-1645. doi: 10.1109/TPAMI.2009.167 [9] OUYANG Wan-li, ZENG Xing-xu, WANG Xiao-gang. Singlepedestrian detection aided by two-pedestrian detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1875-1889. doi: 10.1109/TPAMI.2014.2377734 [10] DOLLÁR P, WOJEK C, SCHIELE B, et al. Pedestrian detection: an evaluation of the state of the art[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(4): 743-761. doi: 10.1109/TPAMI.2011.155 [11] FELZENSZWALB P, MCALLESTER D, RAMANAN D. A discriminatively trained, multiscale, deformable part model[C]//IEEE. 2008 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2008: 1-8. [12] ZHANG Xiao-wei, HU Hai-miao, JIANG Fan, et al. Pedestrian detection based on hierarchical co-occurrence model for occlusion handling[J]. Neurocomputing, 2015, 168: 861-870. doi: 10.1016/j.neucom.2015.05.038 [13] NEHANIV C L, DAUTENHAHN K, KUBACKI J, et al. A methodological approach relating the classification of gesture to identification of human intent in the context of humanrobot interaction[C]//IEEE. 2005IEEE International Workshop on Robots and Human Interactive Communication. New York: IEEE, 2005: 371-377. [14] CHO H, RYBSKI P E, BAR-HILLEL A, et al. Real-time pedestrian detection with deformable part models[C]//IEEE. 2012Intelligent Vehicles Symposium. New York: IEEE, 2012: 1035-1042. [15] CHEN Xiao-feng, HENRICKSON K, WANG Yin-hai. Kinectbased pedestrian detection for crowded scenes[J]. ComputerAided Civil and Infrastructure Engineering, 2016, 31(3): 229-240. doi: 10.1111/mice.12163 [16] CHENG Hong, ZHENG Nan-ning, QIN Jun-jie. Pedestrian detection using sparse Gabor filter and support vector machine[C]//IEEE. 2005Intelligent Vehicles Symposium. New York: IEEE, 2005: 583-587. [17] WU Si, LAGANIRE R, PAYEUR P. Improving pedestrian detection with selective gradient self-similarity feature[J]. Pattern Recognition, 2015, 48(8): 2364-2376. doi: 10.1016/j.patcog.2015.01.005 [18] ZHANG Shan-shan, BENENSON R, SCHIELE B. Filtered channel features for pedestrian detection[C]//IEEE. 2015IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2015: 1751-1760. [19] TIAN Yong-long, LUO Ping, WANG Xiao-gang, et al. Deep learning strong parts for pedestrian detection[C]//IEEE. 2015IEEE International Conference on Computer Vision. New York: IEEE, 2015: 1904-1912. [20] UIJLINGS J R R, VAN DE SANDE K E A, GEVERS T, et al. Selective search for object recognition[J]. International Journal of Computer Vision, 2013, 104(2): 154-171. doi: 10.1007/s11263-013-0620-5 [21] DEMIR B, BRUZZONE L. Fast and accurate image classification with histogram based features and additive kernel SVM[C]//IEEE. 2015 IEEE International Geoscience and Remote Sensing Symposium. New York: IEEE, 2015: 2350-2353. [22] MAJI S, BERG A C, MALIK J. Efficient classification for additive kernel SVMs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(1): 66-77. doi: 10.1109/TPAMI.2012.62 [23] 孙锐, 陈军, 高隽. 基于显著性检测与HOG-NMF特征的快速行人检测方法[J]. 电子与信息学报, 2013, 35(8): 1921-1926. https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201308023.htmSUN Rui, CHEN Jun, GAO Jun. Fast pedestrian detection based on saliency detection and HOG-NMF features[J]. Journal of Electronics and Information Technology, 2013, 35(8): 1921-1926. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201308023.htm [24] WU Jian-xin, GEYER C, REHG J M. Real-time human detection using contour cues[C]//IEEE. 2011IEEE International Conference on Robotics and Automation. New York: IEEE, 2011: 860-867. [25] 曾波波, 王贵锦, 林行刚. 基于颜色自相似度特征的实时行人检测[J]. 清华大学学报: 自然科学版, 2012, 52(4): 571-574. https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201204030.htmZENG Bo-bo, WANG Gui-jin, LIN Xing-gang. Color selfsimilarity feature based real-time pedestrian detection[J]. Journal of Tsinghua University: Science and Technology, 2012, 52(4): 571-574. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201204030.htm -





 点击查看大图
点击查看大图
图(8) / 表(4)
计量
- 文章访问数: 3348
- HTML全文浏览量: 151
- PDF下载量: 2754
- 被引次数: 0
