

Multipath interference suppression algorithm based on spatial signal separation
Article Text (Baidu Translation)
-
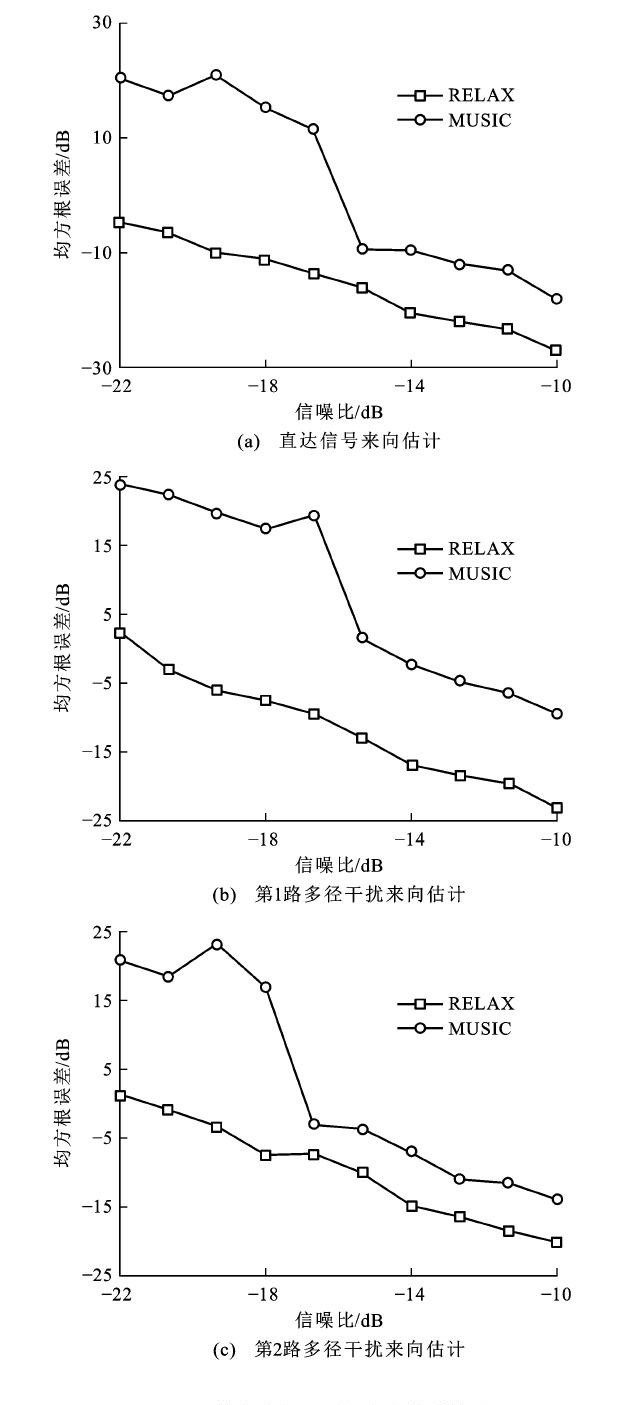
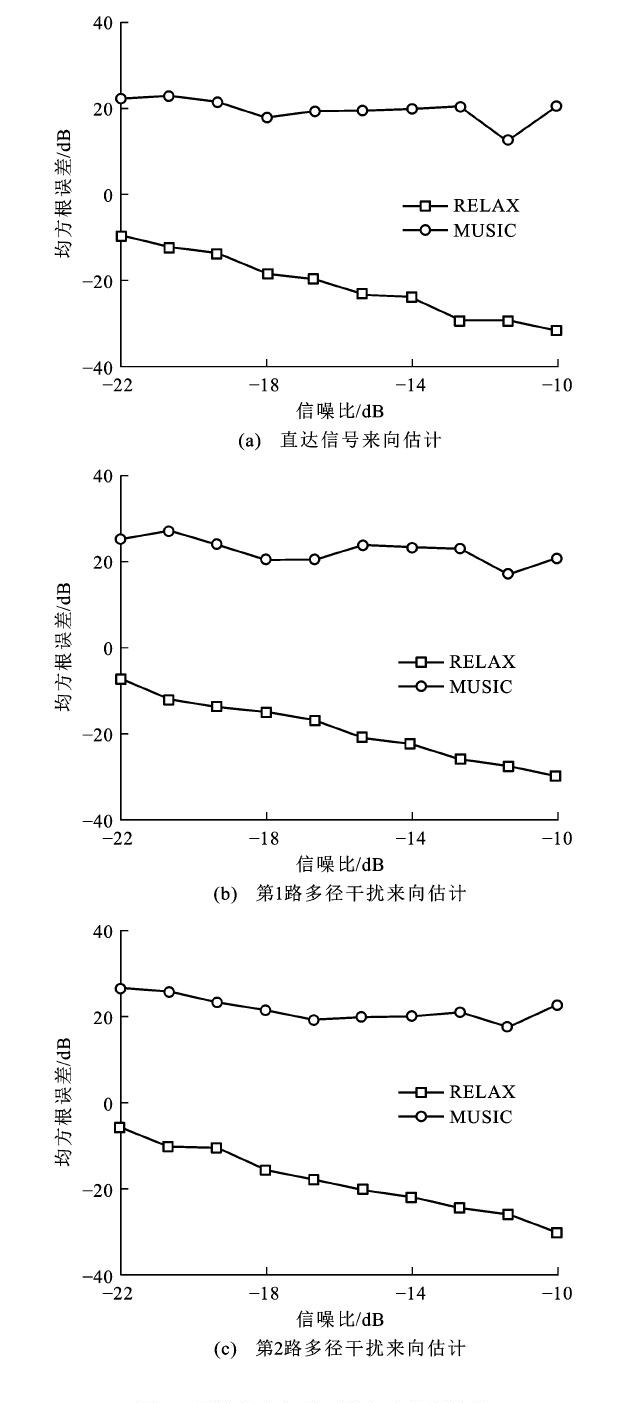
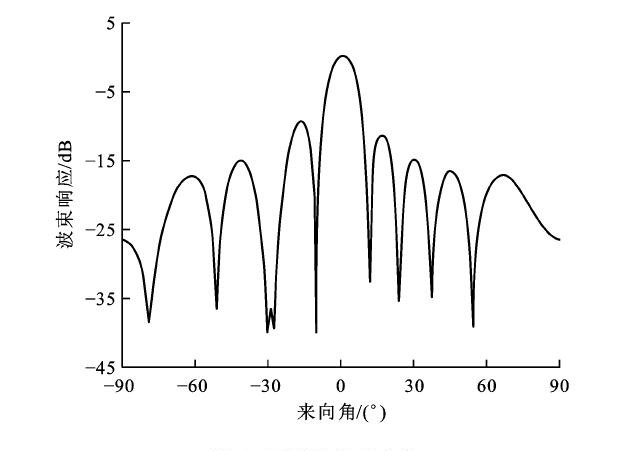
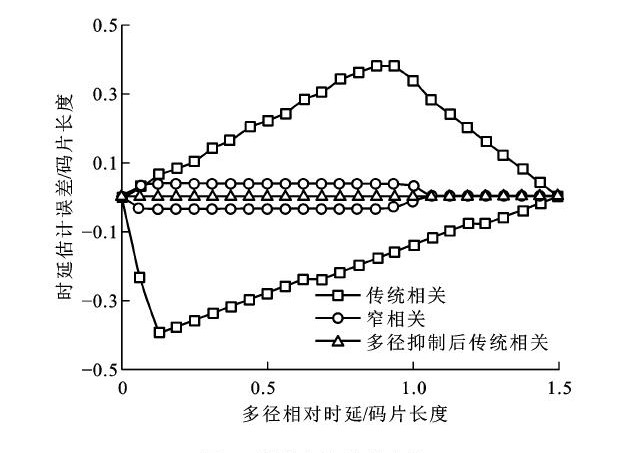
摘要: 针对全球导航卫星系统中的多径干扰抑制问题, 提出了一种有效的低复杂度多径干扰抑制算法, 在直达信号和多径干扰来向角(DOA) 未知的情况下, 利用RELAX算法, 通过反复迭代的思想逐一估计出直达信号和多径干扰的DOA和幅度, 进而识别多径干扰, 利用线性约束最小方差无畸变波束形成技术, 在直达信号方向形成增益与在多径干扰方向形成零陷而抑制多径干扰, 并进行了仿真试验。分析结果表明: 当多径干扰部分相干时, RELAX算法估计的DOA均方根误差比MUSIC算法低了约12dB; 当多径干扰完全相干时, RELAX算法估计的DOA均方根误差比MUSIC算法低了约25dB; 所提算法能够准确估计出直达信号和多径干扰的DOA, 保证通过波束形成零陷空域多径干扰, 使得进入跟踪环路的信号非常洁净, 处理后的码相位跟踪误差接近于0。Abstract: Aiming at the multipath interference suppression problem in global navigation satellite system (GNSS), an efficient multipath interference suppression algorithm with low complexity was proposed.Under the unknown directions of arrival (DOAs) of direct signal and multipath interference, the RELAX algorithm was used to estimate the DOAs and amplitudes of direct signal and multipath interference one by one through repeated iteration idea, and then to distinguish multipath interference.The beam forming technology without distortion based on linearly constrained minimum variance (LCMV) was used to form gain at direct signal direction and null at multipath interference direction, and then to suppress multipath interference.The simulation test was carried out.Analysis result shows that when multipath interferences are partially coherent, the root mean square error of DOA estimated by RELAX algorithm is about 12 dB lower than the value estimated by MUSIC algorithm. When multipath interferences are completely coherent, the root mean square error of DOA estimated by RELAX algorithm is about 25 dB lower than the value estimated by MUSIC algorithm.The proposed algorithm can accurately estimate the DOAs of direct signal and multipath interference, which can ensure nulling the multipath interference in airspace through beam forming to make the signal enteringthe tracking loop very clean.The processed tracking error of code phase is close to 0.
-
Key words:
- GNSS /
- multipath interference /
- coherent signal /
- RELAX algorithm /
- LCMV
-

图 2 干扰部分相干时的来向估计结果
Figure 2. Estimation result of DOA when interferences are partially coherent

图 3 干扰完全相干时的来向估计结果
Figure 3. Estimation result of DOA when interferences are completely coherent
-
[1] VAN DIERENDONCK A J, FENTON P, FORD T. Theory and performance of narrow correlator spacing in a GPS receiver[J]. Journal of the Institute Navigation, 1992, 39 (3): 265-283. doi: 10.1002/j.2161-4296.1992.tb02276.x [2] BRAASCH M S. GPS multipath model validation[C]//IEEE. 1996 IEEE/ION Position Location and Navigation Symposium. New York: IEEE, 1996: 672-678. [3] CANNON M E, LACHAPELLE G, QIU W, et al. Performance analysis of a narrow correlator spacing receiver for precise static GPS positioning[C]//IEEE. 1994IEEE/ION Position Location and Navigation Symposium. New York: IEEE, 1994: 355-360. [4] VAN NEE R D J, SIEREVELD J, FENTON P C, et al. The multipath estimating delay lock loop: approaching theoretical accuracy limits[C]//IEEE. 1994IEEE/ION Position Location and Navigation Symposium. New York: IEEE, 1994: 246-251. [5] TOWNSEND B R, VAN NEE D J R, FENTON P C, et al. Performance evaluation of the multipath estimating delay lock loop[J]. Journal of the Institute of Navigation, 1995, 42 (3): 503-514. [6] CHEN Xin, DOVIS F, PINI M. An innovative multipath mitigation method using coupled amplitude delay lock loops in GNSS receivers[C]//IEEE. 2010 IEEE/ION Position Location and Navigation Symposium. New York: IEEE, 2010: 1118-1126. [7] CHEN Xin, DOVIS F. Enhanced CADLL structure for multipath mitigation in urban scenarios[C]//ION. 2011 International Technical Meeting of the Institute of Navigation. Manassas: ION, 2011: 678-686. [8] 李杰, 吴仁彪, 卢丹, 等. 基于信号分离估计理论的GPS多径抑制算法[J]. 信号处理, 2011, 27 (12): 1884-1888. doi: 10.3969/j.issn.1003-0530.2011.12.014LI Jie, WU Ren-biao, LU Dan, et al. GPS multipath mitigation algorithm based on signal separation estimation theory[J]. Signal Processing, 2011, 27 (12): 1884-1888. (in Chinese). doi: 10.3969/j.issn.1003-0530.2011.12.014 [9] JIA Qiong-qiong, WU Ren-biao, WANG Wen-yi, et al. Multipath interference mitigation in GNSS via WRELAX[J]. GPS Solutions, 2016, 20 (1): 1-12. [10] LI Jian, WU Ren-biao. An efficient algorithm for time delay estimation[J]. IEEE Transactions on Signal Processing, 1998, 46 (8): 2231-2235. doi: 10.1109/78.705444 [11] MAQSOOD M, GAO S, BROWN T, et al. Effects of ground plane on the performance of multipath mitigating antennas for GNSS[C]//IEEE. 2010 Loughborough Antennas and Propagation Conference. New York: IEEE, 2010: 241-244. [12] MAQSOOD M, GAO S, BROWN T W C, et al. A compact multipath mitigating ground plane for multiband GNSS antennas[J]. IEEE Transactions on Antennas and Propagation, 2013, 61 (5): 2775-2782. doi: 10.1109/TAP.2013.2243692 [13] RAY J K, CANNON M E, FENTON P. GPS code and carrier multipath mitigation using a multiantenna system[J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37 (1): 183-195. doi: 10.1109/7.913677 [14] LOPEZ A R. GPS landing system reference antenna[J]. IEEE Antennas and Propagation Magazine, 2010, 52 (1): 104-113. doi: 10.1109/MAP.2010.5466404 [15] MOELKER D J. Multiple antennas for advanced GNSS multipath mitigation and multipath direction finding[C]//ION. 1997International Technical Meeting of The Institute of Navigation. Manassas: ION, 1997: 541-550. [16] CEBRIAN J M, PICANYOL J, GONZALEZ L, et al. ADIBEAM: design and experimental validation of a robust beamforming platform for Galileo reference ground stations[C]//IEEE. Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing. New York: IEEE, 2010: 1-8. [17] PILLAI S U, KWON B H. Forward/backward spatial smoothing techniques for coherent signal identification[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37 (1): 8-15. doi: 10.1109/29.17496 [18] ROY R, KAILATH T. ESPRIT—estimation of signal parameters via rotational invariance techniques[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37 (7): 984-995. doi: 10.1109/29.32276 [19] DANESHMAND S. GNSS interference mitigation using antenna array processing[D]. Calgary: University of Calgary, 2013. [20] DANESHMAND S, JAFARNIA-JAHROMI A, BROUMA-NDAN A, et al. A GNSS structural interference mitigation technique using antenna array processing[C]//IEEE. 2014IEEE 8th Sensor Array and Multichannel Signal Processing Workshop. New York: IEEE, 2014: 109-112. [21] HABER F, ZOLTOWSKI M. Spatial spectrum estimation in a coherent signal environment using an array in motion[J]. IEEE Transactions on Antennas and Propagation, 1986, 34 (3): 301-310. doi: 10.1109/TAP.1986.1143831 [22] LI Jian, ZHENG Dun-min, STOICA P. Angle and waveform estimation via RELAX[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33 (3): 1077-1087. [23] LI Jian, STOICA P, ZHENG Dun-min. Angle and waveform estimation in the presence of colored noise via RELAX[C]//IEEE. Conference Record of the Twenty-Ninth Asilomar Conference on Signals, Systems and Computers. New York: IEEE, 1996: 433-437. [24] LU Dan, WU Ren-biao, LIU Hai-tao. Global positioning system anti-jamming algorithm based on period repetitive CLEAN[J]. IET Radar, Sonar and Navigation, 2013, 7 (2): 164-169. -

 下载:
下载:

 点击查看大图
点击查看大图

图(6)
计量
- 文章访问数: 656
- HTML全文浏览量: 161
- PDF下载量: 343
- 被引次数: 0
