

Comparison of measuring accuracies of tunnel displacements with RDM method and 3D measurement method based on total station
Article Text (Baidu Translation)
-
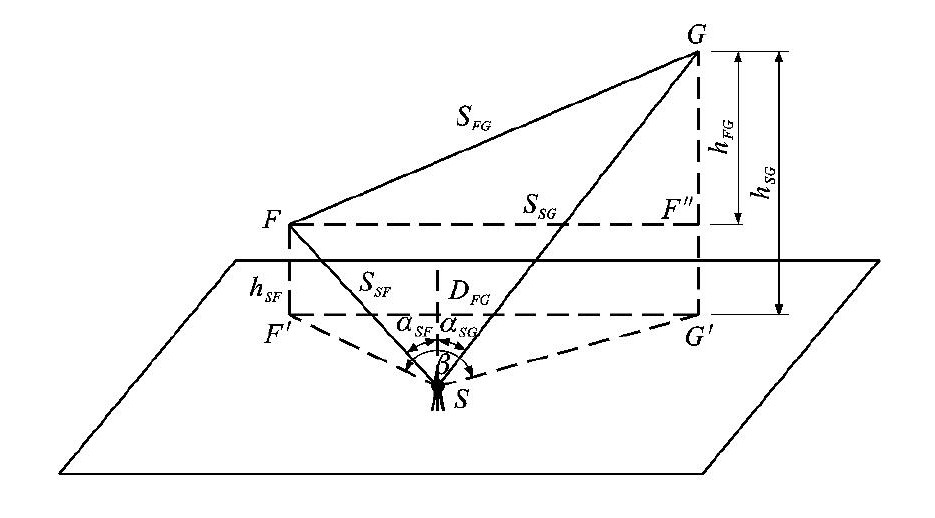
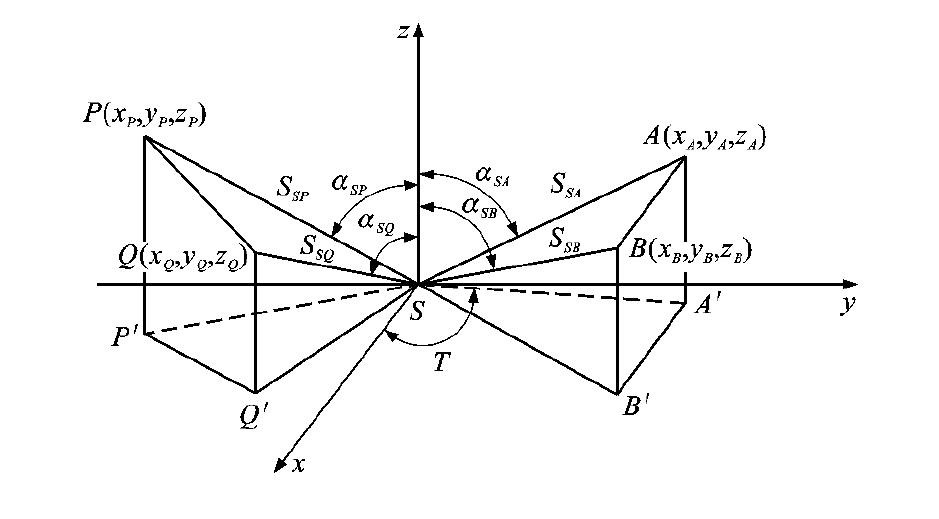
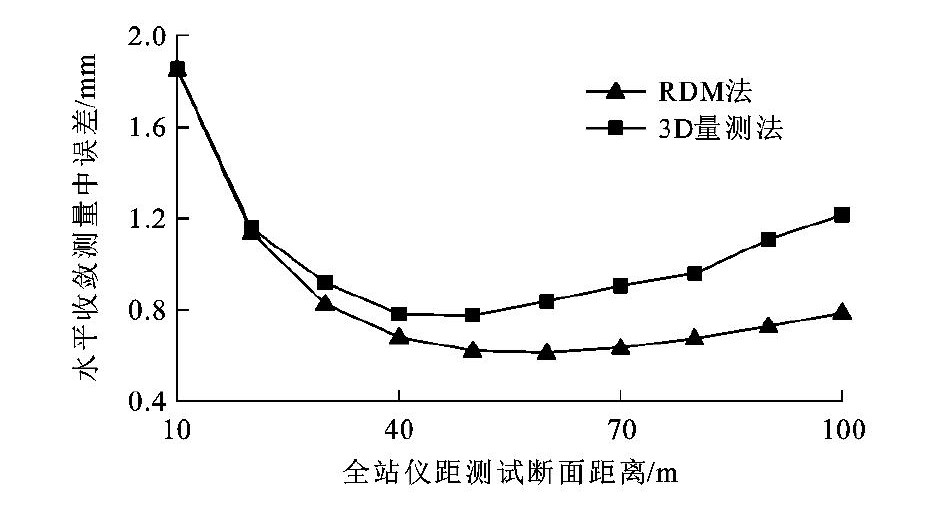
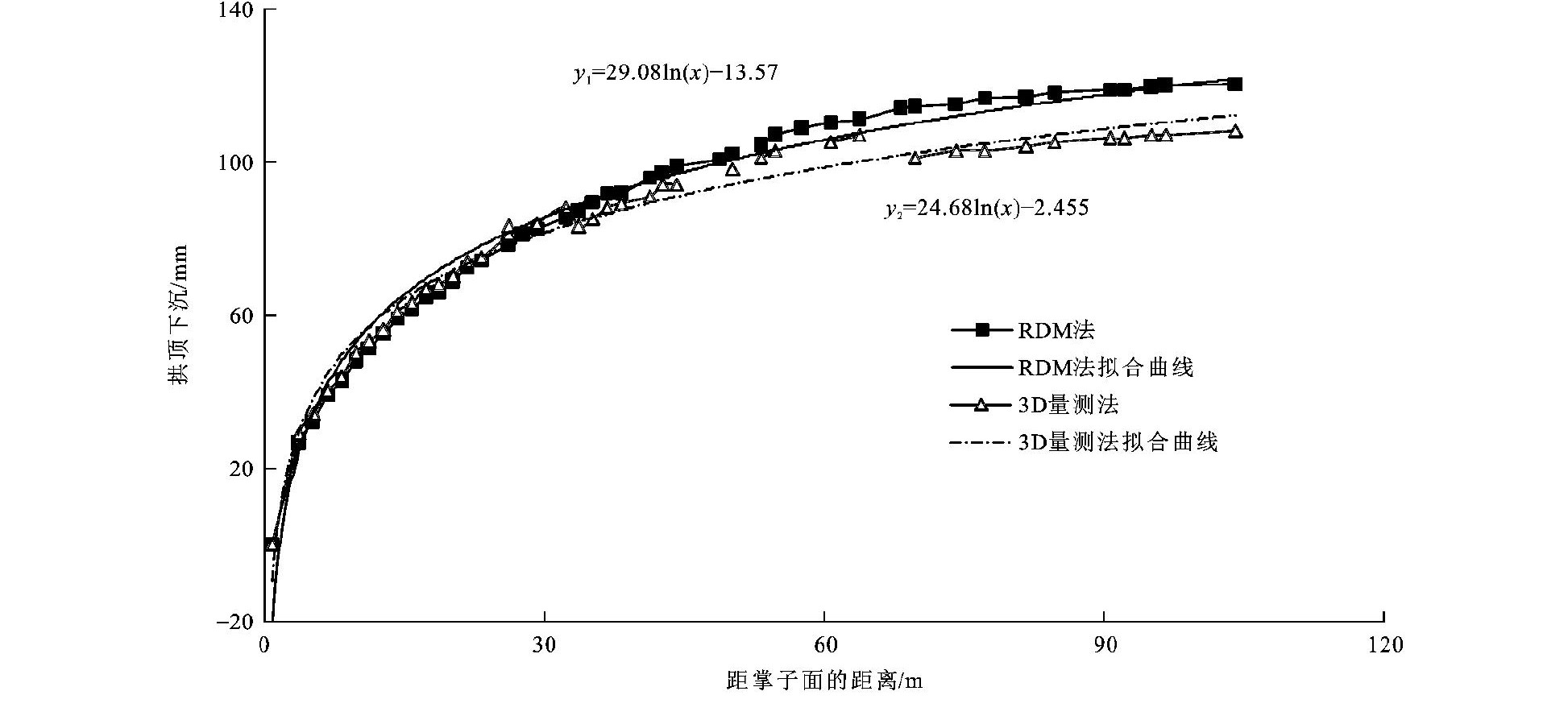
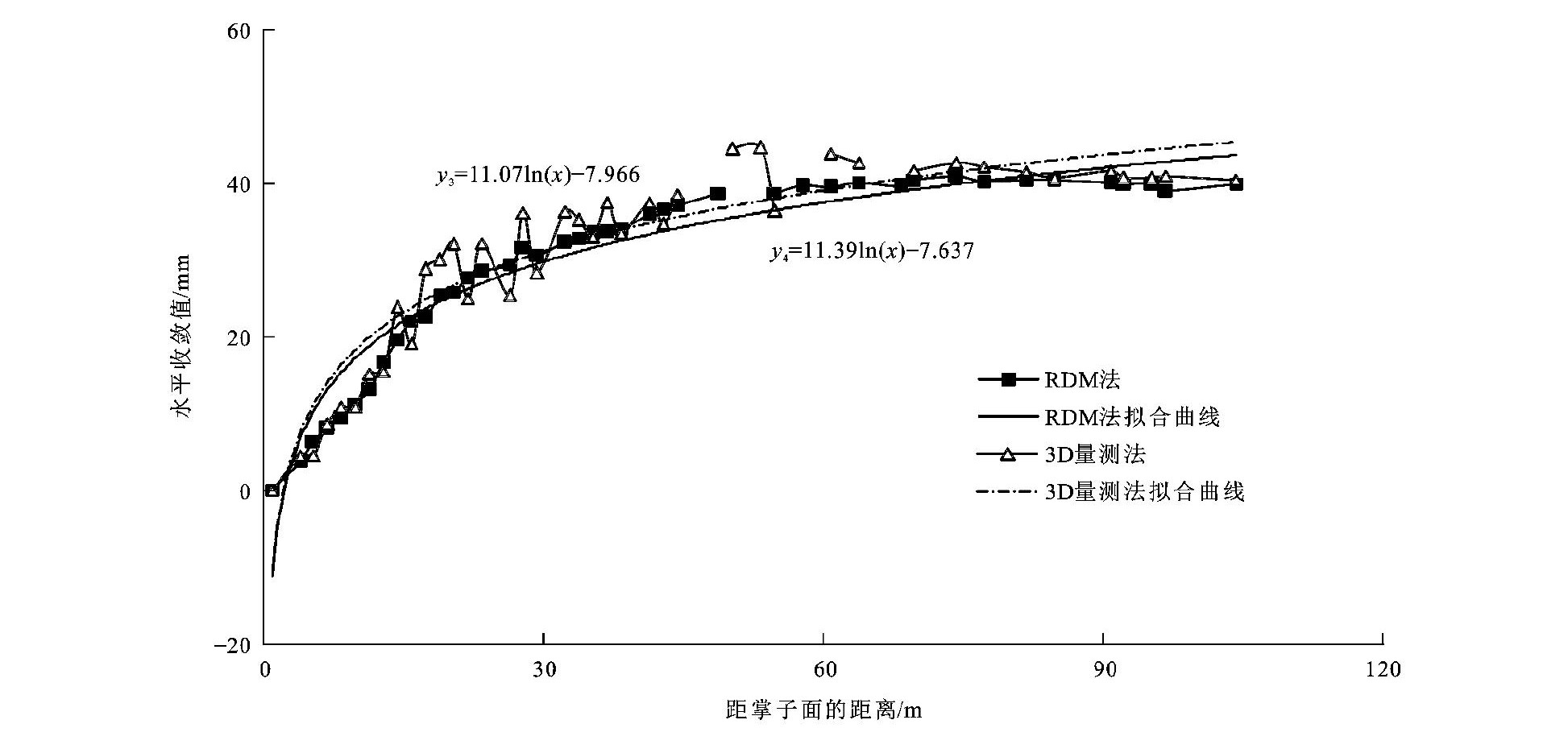
摘要: 根据测量学原理和误差传播定律, 分析了全站仪自由设站对边量测(RDM) 法和三维坐标(3D) 量测法, 建立了2种量测法的隧道变形精度分析模型, 利用中误差评价隧道变形量测精度, 推导了2种方法量测隧道变形的中误差计算公式, 并以某三车道公路隧道为例, 对2种方法的量测精度进行了对比和验证; RDM法通过三角高程测量原理和三角余弦定理得出任意点之间的水平距离、高差和斜距, 根据任意测点之间的三角几何关系得到隧道变形; 3D量测法从任意观测点观测若干已知点的方向和距离, 通过坐标变换计算各测点坐标, 根据各测点坐标得到隧道变形。分析结果表明: 采用RDM法和3D量测法量测隧道拱顶下沉的精度评价公式相同, 而量测隧道水平收敛的精度评价公式不同, RDM法的精度优于3D量测法, 且随着全站仪到量测断面距离的增加, 差值逐渐增大, 当距离为100 m时, 两者精度差值已增大至0.43 mm; 在三车道公路隧道中, 当距离为40~60m时, 2种方法量测隧道水平收敛的精度均为最高, RDM法可达0.61~0.68mm, 3D量测法可达0.78~0.84mm; RDM法和3D量测法量测的隧道拱顶下沉曲线平滑、圆顺, 拟合度都大于0.95, 而在量测隧道净空收敛方面, RDM法的曲线拟合度大于0.9, 3D量测法的曲线拟合度小于0.9, 因此, RDM法量测精度优于3D量测法。Abstract: Based on geodesy principles and error propagation laws, the remote distance measurement (RDM) method and 3Dcoordinate measurement method of based on free stationing of total station were analyzed, the accuracy analysis models of tunnel displacement based on the two measuring methods were established, and the mean square error was used to evaluate the measuring accuracy. The formulas of mean square error on the two methods were deduced. Athree-lane highway tunnel was taken as an example to compare and verify the measuring accuracies of the two methods. In RDM method, through gaining the horizontal distance, the elevation difference and slant distance of two random measurement points were gained by the triangulate height measurement principle and the cosine theorem, and the tunnel displacement was obtained according to the trigonometric and geometric relationship between two random measurement points. In 3D measurement method, the directions and distances of several known points were observed from the random observation point, the coordinates of random measurement points were calculated by using the coordinate conversion, and the tunnel displacement was obtained according to the coordinates of random measurement points. Analysis result shows that the accuracy evaluating formulas of RDM method and 3D measurement method computing tunnel vault settlement are same, however, the formulas computing tunnel horizontal convergence are different, and the accuracy of RDM method is higher than 3D measurement method. When the distance of total station and measured profile increases, the measuring accuracy difference of two methods increases. When the distance is 100 m, the accuracy difference increases to 0.43 mm. In three-lane highway tunnel, when the distance is 40-60 m, the measuring accuracies of tunnel horizontal convergences for the two methods are highest, the accuracy of RDM method can reach 0.61-0.68 mm, and the accuracy of 3D measurement method can reach 0.78-0.84 mm. The curves of tunnel vault settlement measured by using RDM method and 3D measurement method are smooth, and the fitting degrees of the curves are greater than 0.95. However, in the aspect of measuring tunnel horizontal convergence, the curve's fitting degree for RDM method is greater than 0.9, and the degree is less than 0.9 for 3D measurement method. So, the measuring accuracy of RDM method is higher than 3D measurement method.
-
Key words:
- tunnel engineering /
- tunnel displacement /
- measurement accuracy /
- total station /
- RDM method /
- 3D measurement method
-

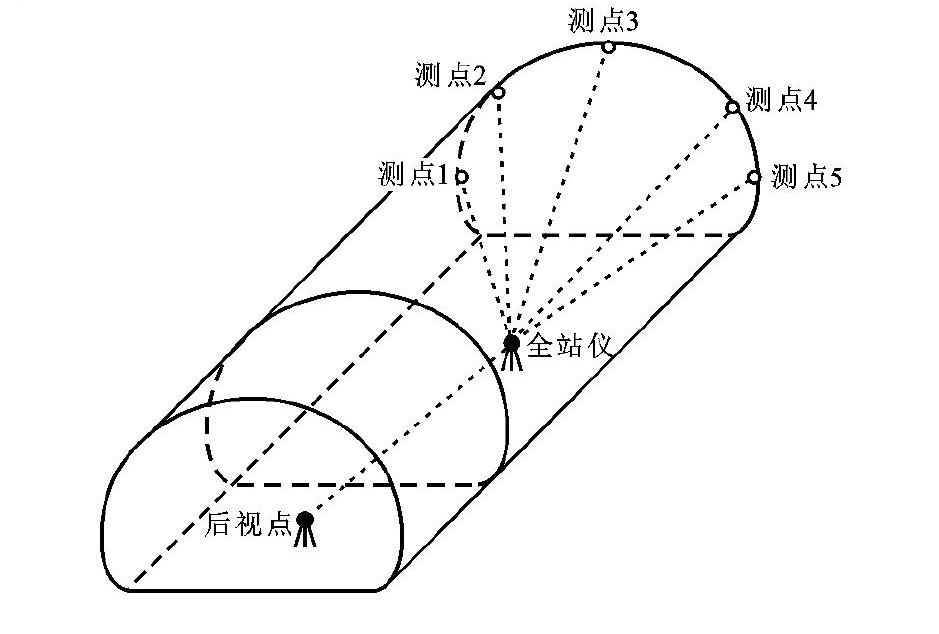
图 3 3D量测法量测隧道变形模型
Figure 3. Measurement model of tunnel displacement with 3D measurement method
-
[1] SCHUBERT W, STEINDORFER A, BUTTON A E. Displacement monitoring in tunnels—an overview[J]. Felsbau, 2002, 20 (2): 7-15. [2] AYDIN A, OZBEK A, ACAR A. Geomechanical characterization, 3-D optical monitoring and numerical modeling in Kirkgecit-1Tunnel, Turkey[J]. Engineering Geology, 2014, 181: 38-47. doi: 10.1016/j.enggeo.2014.08.010 [3] KOVARI K, AMSTAD C. Decision making in tunneling based on field measurements[R]. Zürich: Swiss Federal Institute of Technology, 1993. [4] 陈建勋, 杨忠, 袁雪戡. 秦岭终南山特长公路隧道大埋深段施工监测及分析[J]. 建筑科学与工程学报, 2006, 23 (3): 71-75. doi: 10.3321/j.issn:1673-2049.2006.03.014CHEN Jian-xun, YANG Zhong, YUAN Xue-kan. Construction monitoring and measuring in segments of large embedded depth in Qinling Zhongnanshan Super-Long Highway Tunnel[J]. Journal of Architecture and Civil Engineering, 2006, 23 (3): 71-75. (in Chinese). doi: 10.3321/j.issn:1673-2049.2006.03.014 [5] 叶飞, 丁文其, 朱合华, 等. 公路隧道现场监控量测及信息反馈[J]. 长安大学学报: 自然科学版, 2007, 27 (5): 79-83. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200705019.htmYE Fei, DING Wen-qi, ZHU He-hua, et al. Site monitoring and information feedback of highway tunnel[J]. Journal of Chang'an University: Natural Science Edition, 2007, 27 (5): 79-83. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200705019.htm [6] 陈建勋, 王梦恕, 轩俊杰, 等. 两车道公路黄土隧道变形规律[J]. 交通运输过程学报, 2012, 12 (3): 9-18. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201203005.htmCHEN Jian-xun, WANG Meng-shu, XUAN Jun-jie, et al. Deformation rule of loess highway tunnel with two lanes[J]. Journal of Traffic and Transportation Engineering, 2012, 12 (3): 9-18. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201203005.htm [7] 赖金星, 樊浩博, 来弘鹏, 等. 软弱黄土隧道变形规律现场测试与分析[J]. 岩土力学, 2015, 36 (7): 2003-2012, 2020. https://www.cnki.com.cn/Article/CJFDTOTAL-YTLX201507030.htmLAI Jin-xing, FAN Hao-bo, LAI Hong-peng, et al. In-situ monitoring and analysis of tunnel deformation law in weak loess[J]. Rock and Soil Mechanics, 2015, 36 (7): 2003-2012, 2020. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YTLX201507030.htm [8] DUNNICLIFF J. Geotechnical Instrumentation for Monitoring Field Performance[M]. New York: Wiley-Interscience, 1993. [9] SIMEONI L, ZANEI L. A method for estimating the accuracy of tunnel convergence measurements using tape distometers[J]. International Journal of Rock Mechanics and Mining Sciences, 2009, 46: 796-802. doi: 10.1016/j.ijrmms.2008.11.004 [10] KAVVADAS M J. Monitoring ground deformation in tunnelling: current practice in transportation tunnels[J]. Engineering Geology, 2005, 79: 93-113. doi: 10.1016/j.enggeo.2004.10.011 [11] 王浩, 葛修润, 宋罡, 等. 全站仪在隧道开挖施工三维变形监测中的应用[J]. 岩石力学与工程学报, 1999, 18 (增): 1217-1219.WANG Hao, GE Xiu-run, SONG Gang, et al. Application of total station in 3-D deformation monitoring during tunnel excavation[J]. 1999, 18 (S): 1217-1219. (in Chinese). [12] 谭俊玲. 全站仪遥测技术在乌鞘岭铁路隧道围岩变形监测中的应用[J]. 现代隧道技术, 2004, 41 (4): 51-54. doi: 10.3969/j.issn.1009-6582.2004.04.009Tan Jun-ling. Application of the remote sensing technology with a total-station to monitor the deformations of surrounding rock in Wushaoling Railway Tunnel[J]. Modern Tunnelling Technology, 2004, 41 (4): 51-54. (in Chinese). doi: 10.3969/j.issn.1009-6582.2004.04.009 [13] 田胜利, 葛修润, 涂志军. 隧道及地下空间结构变形的数字化近景摄影测量试验研究[J]. 岩石力学与工程学报, 2006, 25 (7): 1309-1315. doi: 10.3321/j.issn:1000-6915.2006.07.003TIAN Sheng-li, GE Xiu-run, TU Zhi-jun. Testing study on digital close-range photogrammetry for measuring deformations of tunnel and underground spaces[J]. Chinese Journal of Rock Mechanics and Engineering, 2006, 25 (7): 1309-1315. (in Chinese). doi: 10.3321/j.issn:1000-6915.2006.07.003 [14] 刘大刚, 王明年. 基于数码摄影技术的隧道围岩变形非接触量测方法研究[J]. 现代隧道技术, 2007, 44 (3): 22-25. doi: 10.3969/j.issn.1009-6582.2007.03.005LIU Da-gang, WANG Ming-nian. Study on the non-contact measurement of tunnel surrounding rock deformation based on digital photogrammetry[J]. Modern Tunnelling Technology, 2007, 44 (3): 22-25. (in Chinese). doi: 10.3969/j.issn.1009-6582.2007.03.005 [15] MAHDEVARI S, TORABI S R. Prediction of tunnel convergence using Artificial Neural Networks[J]. Tunnelling and Underground Space Technology, 2012, 28: 218-228. doi: 10.1016/j.tust.2011.11.002 [16] 罗彦斌, 陈建勋. 土质浅埋隧道CRD法施工中隔壁变形监测与分析[J]. 现代隧道技术, 2011, 48 (6): 105-109. https://www.cnki.com.cn/Article/CJFDTOTAL-XDSD201106021.htmLUO Yan-bin, CHEN Jian-xun. Monitoring and analysis of the deformation of the middle wall during the construction of a shallow soil tunnel by the CRD method[J]. Modern Tunnelling Technology, 2011, 48 (6): 105-109. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDSD201106021.htm [17] 罗彦斌, 陈建勋. 隧道水平围岩压力计算方法[J]. 交通运输工程学报, 2012, 12 (2): 10-17. http://transport.chd.edu.cn/article/id/201202002LUO Yan-bin, CHEN Jian-xun. Calculation method of horizontal surrounding rock pressure for tunnel[J]. Journal of Traffic and Transportation Engineering, 2012, 12 (2): 10-17. (in Chinese). http://transport.chd.edu.cn/article/id/201202002 [18] LUO Yan-bin, CHEN Jian-xun, HUANG Pei, et al. Deformation and mechanical model of temporary support sidewall in tunnel cutting partial section[J]. Tunnelling and Underground Space Technology, 2017, 61: 40-49. [19] LUO Yan-bin, CHEN Jian-xun, WANG Hong-yu, et al. Deformation rule and mechanical characteristics of temporary support in soil tunnel constructed by sequential excavation method[J]. KSCE Journal of Civil Engineering, 2016, DOI: 10.1007/s12205-016-0978-3. [20] 宋冶. 自由设站法三维变形观测精度的检测[J]. 工程勘察, 1999 (1): 61-63. https://www.cnki.com.cn/Article/CJFDTOTAL-GCKC901.017.htmSONG Ye. Inspection on the precision of 3D deformation observation of free stationing method[J]. Geotechnical Investigation and Surveying, 1999 (1): 61-63. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GCKC901.017.htm [21] 杨松林, 刘维宁, 王梦恕, 等. 自动全站仪隧道围岩变形非接触监测及分析预报系统研究[J]. 铁道学报, 2004, 26 (3): 93-97. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200403018.htmYANG Song-lin, LIU Wei-ning, WANG Meng-shu, et al. Study on the auto-total station system for monitoring analyzing and forecasting tunnel country rock deformation[J]. Journal of the China Railway Society, 2004, 26 (3): 93-97. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200403018.htm [22] 程效军, 缪盾. 全站仪自由设站法精度探讨[J]. 铁道勘察, 2008 (6): 1-4. https://www.cnki.com.cn/Article/CJFDTOTAL-TLHC200806002.htmCHENG Xiao-jun, MIAO Dun. Discussion on accuracy of liberal station method with total station machine[J]. Railway Investigation and Surveying, 2008 (6): 1-4. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TLHC200806002.htm [23] 袁恒, 刘成龙, 卢杰, 等. 全站仪三维自由设站隧道非接触监控量测原理及精度分析[J]. 工程勘察, 2012 (8): 63-67. https://www.cnki.com.cn/Article/CJFDTOTAL-GCKC201208015.htmYUAN Heng, LIU Cheng-long, LU Jie, et al. The principle and accuracy analysis of non-contact monitoring for tunnel based on free station of total station[J]. Geotechnical Investigation and Surveying, 2012 (8): 63-67. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GCKC201208015.htm [24] LUO Yan-bin, CHEN Jian-xun, XI Wei-zheng, et al. Analysis of tunnel displacement accuracy with total station[J]. Measurement, 2016, 83: 29-37. -

 下载:
下载:




 点击查看大图
点击查看大图
图(9) / 表(2)
计量
- 文章访问数: 826
- HTML全文浏览量: 176
- PDF下载量: 537
- 被引次数: 0
