

Intelligent control system of variable approach lane based on adaptive neuro-fuzzy inference system
Article Text (Baidu Translation)
-
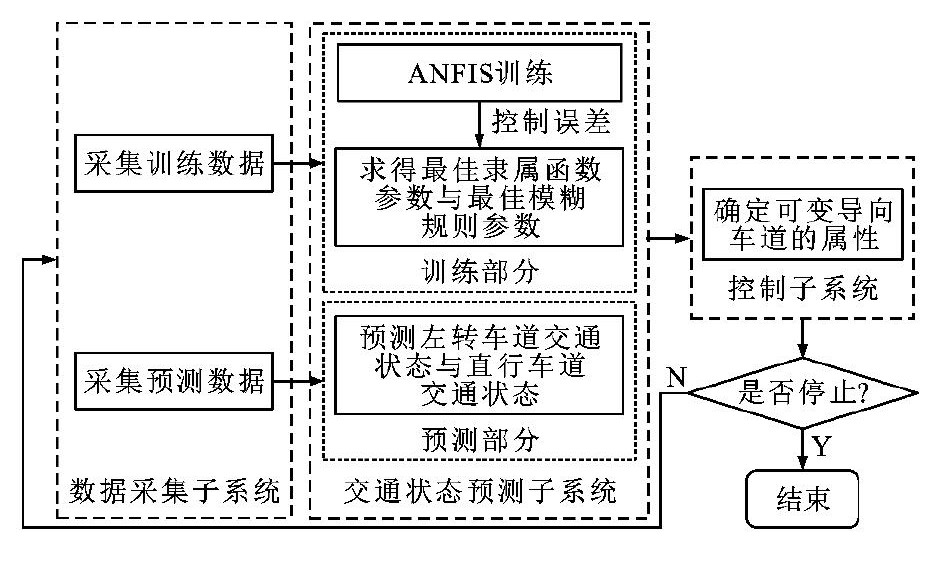
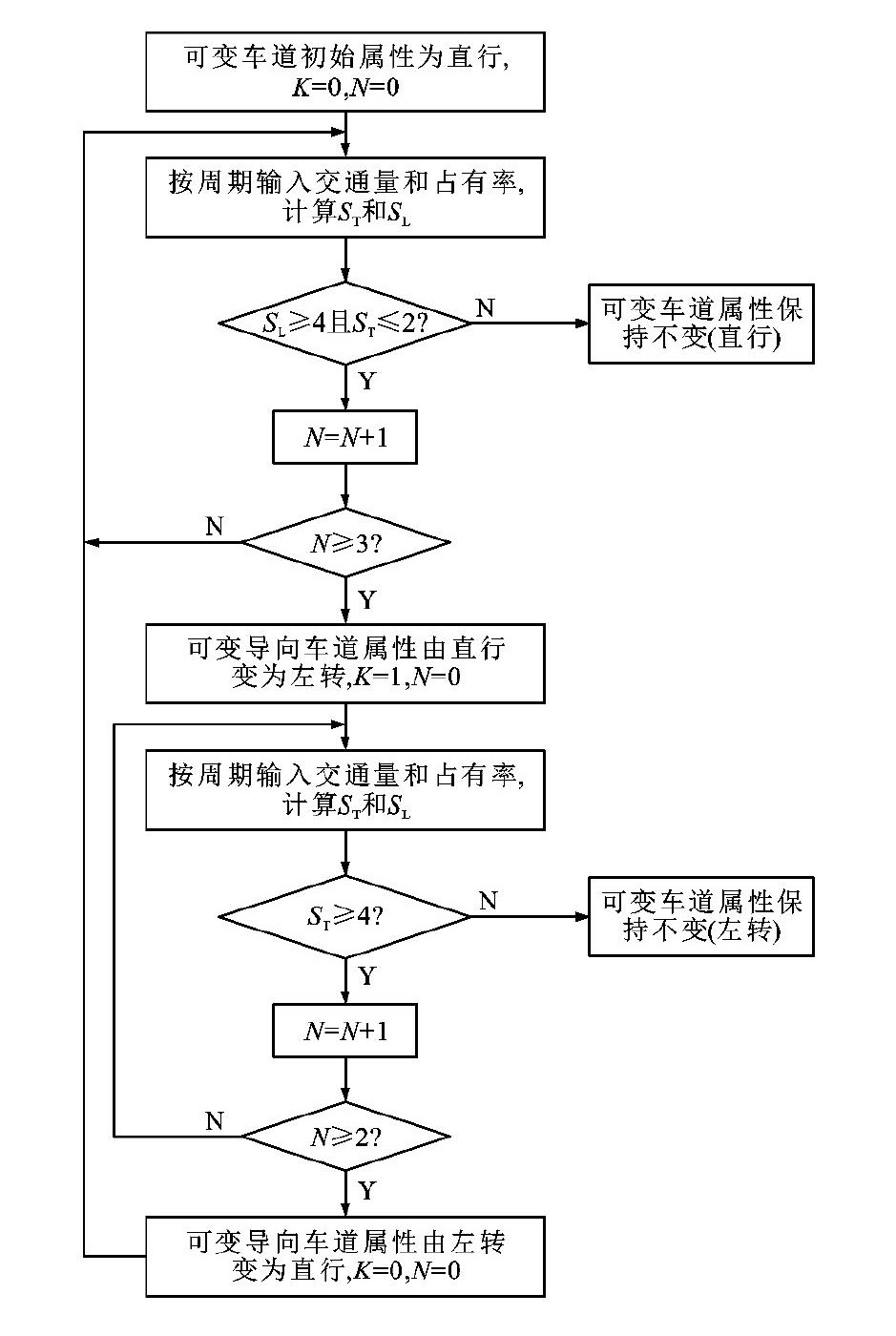
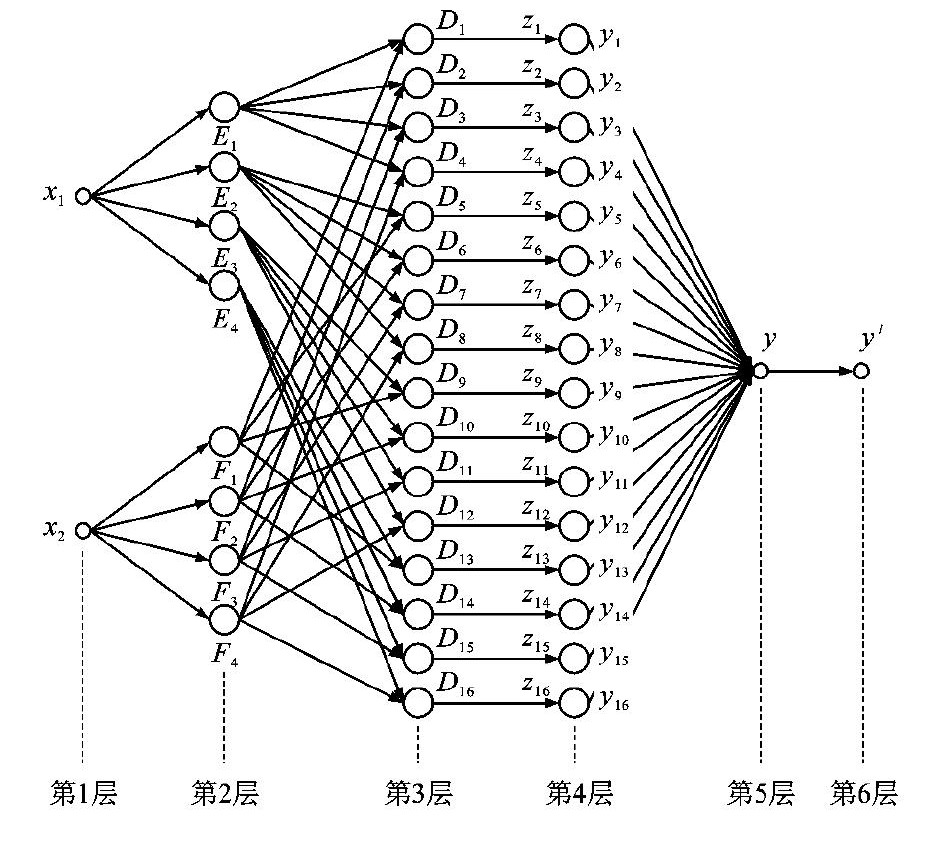
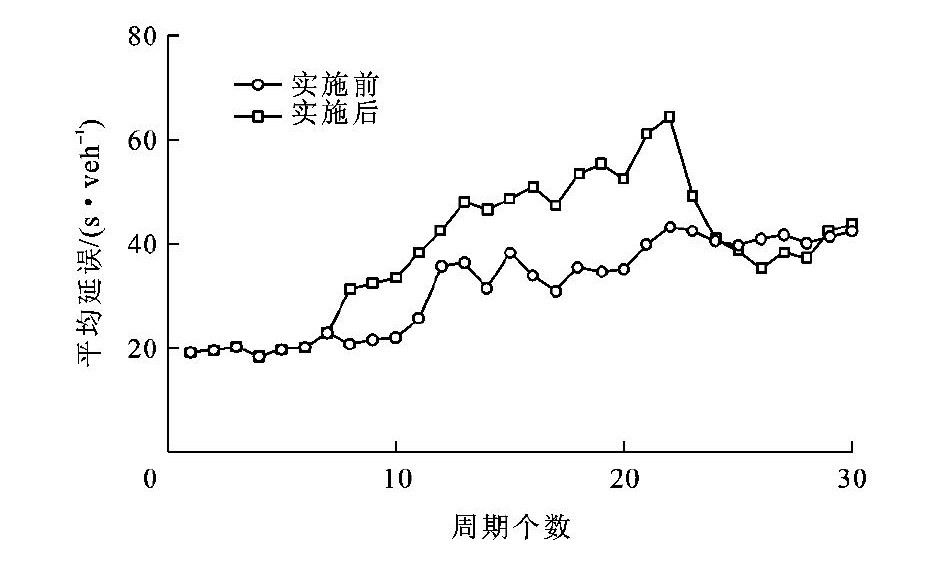
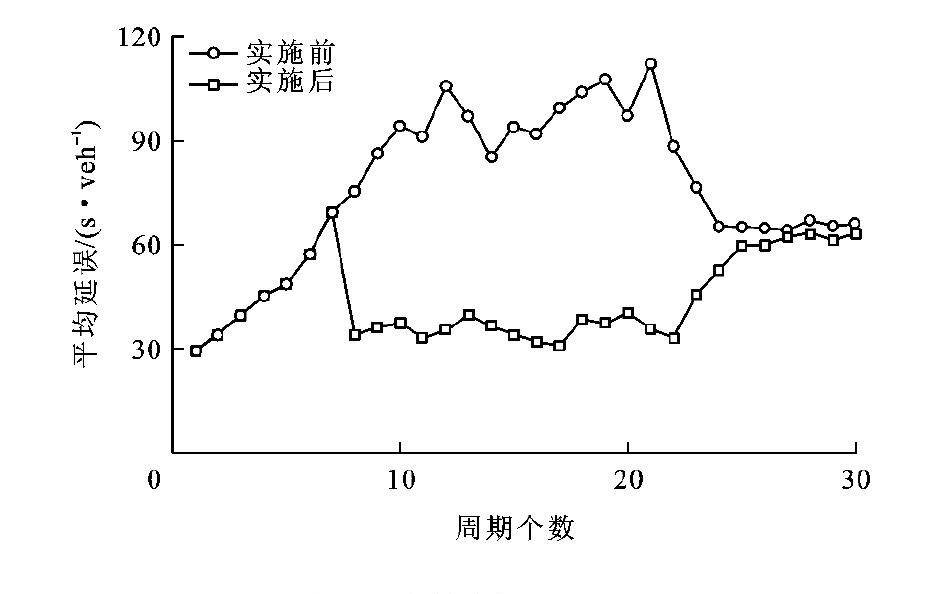
摘要: 为缓解因交通流向分布不均衡导致的交叉口交通拥挤状况, 以交叉口进口道的可变导向车道为研究对象, 建立了基于自适应模糊神经推理系统的可变导向车道智能控制系统。智能控制系统由数据采集子系统、交通状态预测子系统和控制子系统构成, 共同完成可变导向车道的智能化控制。将数据采集子系统检测到的实时交通数据录入到预先训练好的交通状态预测子系统中, 可得到左转车辆和直行车辆的运行状态, 并根据控制子系统的结构化算法来确定可变导向车道的属性。计算结果表明: 交通状态预测子系统的测试误差为0.075 097, 满足精度要求, 可以用于交通状态预测; 采用可变导向车道智能控制系统能明显改善交叉口交通拥堵状况, 当左转车辆比例为25%时, 关键进口道综合延误减少了6.1%, 平均停车次数减少了9.5%, 平均排队长度减少了6.1%, 当左转车辆比例上升至30%时, 3个指标分别下降了8.1%、12.4%与8.0%, 表明左转比例越高, 作用效果越显著。Abstract: In order to alleviate the traffic congestion caused by the uneven distribution of traffic flow, the variable approach lanes (VAL) of intersection entrance were taken as research object, and an intelligent control system based on adaptive neuro-fuzzy inference system (ANFIS) was established. The intelligent control system consisted of data acquisition subsystem, traffic status prediction subsystem and control subsystem, and the intelligent control of VAL was completed by the three subsystems. When the real-time traffic data detected by the data acquisition subsystem were transfered into the pre-trained traffic status prediction subsystem, the traffic statuses of left-turning and going-straight vehicles were obtained, and the attribute of VAL was determined according to the structured algorithm. Computation result shows that the test error of traffic status prediction subsystem is 0.075 097, which meets the accuracy requirement to predict the traffic status. The intelligent control system of VAL can significantly improve the trafficcongestion at the intersection. While the ratio of left-turning vehicles is 25%, the total delay of key entrance lane reduces by 6.1%, the average stopping number reduces by 9.5%, and the average queue length reduces by 6.1%. When the ratio of left-turning vehicles rises to 30%, the three indicators decrease by 8.1%, 12.4% and 8.0%, respectively. Obviously, the higher the proportion of left-turning vehicles is, the more significant the effect is.
-
[1] ZHANG Hao-zhi, GAO Zi-you. Two-way road network design problem with variable lanes[J]. Journal of Systems Science and Systems Engineering, 2007, 16 (1): 50-61. doi: 10.1007/s11518-007-5034-x [2] LIU You-jun, HUANG Wei. The optimal design of signalized intersection based on variable approach-lane control[C]∥IEEE. 2009 2nd International Conference on Intelligent Computation Technology and Automation. New York: IEEE, 2009: 826-829. [3] LIANG Xiao, HU Chun-ping, MA Chao-yun, et al. Empirical study on variable lanes design of Chaoyang North Street in Beijing[C]∥IEEE. Proceedings of the 30th Chinese Control Conference. New York: IEEE, 2011: 5527-5531. [4] LI Xu, CHEN Jun, WANG Hao. Study on flow direction changing method of reversible lanes on urban arterial roadways in China[J]. Procedia-Social and Behavioral Sciences, 2013, 19: 807-816. [5] WOLSHON B, LAMBERT L. Reversible lane systems: synthesis of practice[J]. Journal of Transportation Engineering, 2006, 132 (12): 933-944. doi: 10.1061/(ASCE)0733-947X(2006)132:12(933) [6] WANG J W, WANG H F, ZHANG W J, et al. Evacuation planning based on the contraflow technique with consideration of evacuation priorities and traffic setup time[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14 (1): 480-485. doi: 10.1109/TITS.2012.2204402 [7] 顾珊珊, 陈峻, 周洋, 等. 可变导向车道作用机理与实例效果评价[J]. 北京理工大学学报, 2012, 32 (增1): 148-151.GU Shan-shan, CHEN Jun, ZHOU Yang, et al. Mechanism and implementation effect evaluation of variable lane[J]. Transactions of Beijing Institute of Technology, 2012, 32 (S1): 148-151. (in Chinese). [8] ALHAJYASEEN W K M, NAJJAR M, RATROUT N T, et al. The effectiveness of applying dynamic lane assignment at all approaches of signalized intersection[J]. Case Studies on Transport Policy, 2017, 2 (1): 65-72. [9] ZHAO Jing, LIU Yue, YANG Xiao-guang. Operation of signalized diamond interchanges with frontage roads using dynamic reversible lane control[J]. Transportation Research Part C: Emerging Technologies, 2015, 51: 196-209. doi: 10.1016/j.trc.2014.11.010 [10] ASSI K J, RATROUT N T. Proposed quick method for applying dynamic lane assignment at signalized intersections[J]. IATSS Research, 2017, DOI: 10.1016/j.iatssr.2017.03.004. [11] MA Qing, WANG Min. A New control strategy of variable lane based on video detection[C]∥IEEE. 2014 5th International Conference on Intelligent Systems Design and Engineering Applications. New York: IEEE, 2014: 40-43. [12] LI Li-li, QU Zhao-wei, SONG Xian-min, et al. Research on variable lane signalized control method[C]∥IEEE. 2009International Conference on Measuring Technology and Mechatronics Automation. New York: IEEE, 2009: 575-578. [13] 徐红领, 于泉. 信号交叉口可变车道控制阈值的研究[J]. 道路交通与安全, 2014, 14 (2): 43-48. https://www.cnki.com.cn/Article/CJFDTOTAL-DLJA201402010.htmXU Hong-ling, YU Quan. Research on threshold of variable lane at signal control intersection[J]. Road Traffic and Safety, 2014, 14 (2): 43-48. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLJA201402010.htm [14] 丁靖. 信号控制交叉口可变导向车道的研究[D]. 大连: 大连理工大学, 2015.DING Jing. Research on variable approach lane at signalized intersection[D]. Dalian: Dalian University of Technology, 2015. (in Chinese). [15] 张野, 袁振洲. 信号交叉口左转专用可变车道设置研究[J]. 交通信息与安全, 2014, 32 (4): 26-30. doi: 10.3963/j.issn.1674-4861.2014.04.005ZHANG Ye, YUAN Zhen-zhou. Design of the left-turn variable lane at signalized intersection[J]. Journal of Transport Information and Safety, 2014, 32 (4): 26-30. (in Chinese). doi: 10.3963/j.issn.1674-4861.2014.04.005 [16] 傅立骏, 郭海锋, 董红召. 基于动态交通流量的可变车道自适应控制方法[J]. 科技通报, 2011, 27 (6): 899-903. doi: 10.3969/j.issn.1001-7119.2011.06.019FU Li-jun, GUO Hai-feng, DONG Hong-zhao. An adaptive control method of variable lane based on dynamic traffic flow[J]. Bulletin of Science and Technology, 2011, 27 (6): 899-903. (in Chinese). doi: 10.3969/j.issn.1001-7119.2011.06.019 [17] 周鹏, 丁晨. 智能可变车道的导向判决算法的研究与实现[J]. 武汉理工大学学报, 2012, 34 (8): 82-86. https://www.cnki.com.cn/Article/CJFDTOTAL-WHGY201208017.htmZHOU Peng, DING Chen. Research and implementation of the oriented decision algorithm of intelligent variable lane[J]. Journal of Wuhan University of Technology, 2012, 34 (8): 82-86. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WHGY201208017.htm [18] ZHOU Hong-mei, DING Jing, QIN Xiao. Optimization of variable approach lane use at isolated signalized intersections[C]∥TRB. Transportation Research Record 2016Annual Meeting. Washington: TRB, 2016: 65-74. [19] 徐红领. 信号交叉口可变车道预信号关系的研究[D]. 北京: 北京工业大学, 2014.XU Hong-ling. Research on signal intersection variable lane presignal relationship[D]. Beijing: Beijing University of Technology, 2014. (in Chinese). [20] 周洋, 林浩, 顾珊珊, 等. 信号交叉口可变导向车道上游检测器布设及触发条件研究[J]. 北京理工大学学报, 2013, 33 (12): 1298-1302. doi: 10.3969/j.issn.1001-0645.2013.12.018ZHOU Yang, LIN Hao, GU Shan-shan, et al. Detector layouts and trigger conditions of upstream variable lanes at signalized intersections[J]. Transactions of Beijing Institute of Technology, 2013, 33 (12): 1298-1302. (in Chinese). doi: 10.3969/j.issn.1001-0645.2013.12.018 [21] 孙海蓉. 模糊神经网络的研究及其应用[D]. 保定: 华北电力大学, 2006.SUN Hai-rong. The research and application of the fuzzy neural network[D]. Baoding: North China Electric Power University, 2006. (in Chinese). [22] 林碧华. 神经模糊系统研究及其在电厂协调系统中的应用[D]. 保定: 华北电力大学, 2005.LIN Bi-hua. Research on neural fuzzy system and its application in coordinated control system of power plant[D]. Baoding: North China Electric Power University, 2005. (in Chinese). [23] 侯明善, 兰云. 基于自适应模糊神经推理网络的交通流量预测研究[J]. 机械科学与技术, 2006, 25 (10): 1178-1181. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200610013.htmHOU Ming-shan, LAN Yun. Traffic flow prediction based on adaptive neuro-fuzzy inference system[J]. Mechanical Science and Technology, 2006, 25 (10): 1178-1181. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200610013.htm [24] SUN C. Rule-base structure identification in an adaptivenetwork-based fuzzy inference system[J]. IEEE Transactions on Fuzzy Systems, 1994, 2 (1): 64-73. [25] 周先文. 基于模糊神经网络的智能交通信号研究[D]. 成都: 西华大学, 2012.ZHOU Xian-wen. The study of intelligent traffic signal based on fuzzy neural network[D]. Chengdu: Xihua University, 2012. (in Chinese). [26] 陈德望, 王飞跃, 陈龙. 基于模糊神经网络的城市高速公路入口匝道控制算法[J]. 交通运输工程学报, 2003, 3 (2): 100-105. http://transport.chd.edu.cn/article/id/200302017CHEN De-wang, WANG Fei-yue, CHEN Long. Freeway ramp control algorithm based on neuro fuzzy networks[J]. Journal of Traffic and Transportation Engineering, 2003, 3 (2): 100-105. (in Chinese). http://transport.chd.edu.cn/article/id/200302017 [27] 王辉. 基于自适应模糊神经网络的交通流状态预测[J]. 交通与计算机, 2007, 4 (25): 46-49. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200704013.htmWANG Hui. Prediction of traffic flow state based on adaptive neuro fuzzy inference system[J]. Journal of Transport Information and Safety, 2007, 4 (25): 46-49. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200704013.htm [28] 李丽丽, 曲昭伟, 王殿海. 可变车道诱导方法研究[J]. 交通与计算机, 2008, 26 (5): 53-56. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200805016.htmLI Li-li, QU Zhao-wei, WANG Dian-hai. Study on guidance method for variable lane[J]. Computer and Communications, 2008, 26 (5): 53-56. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS200805016.htm -

 下载:
下载:










 点击查看大图
点击查看大图
图(10) / 表(7)
计量
- 文章访问数: 817
- HTML全文浏览量: 150
- PDF下载量: 542
- 被引次数: 0
