

Simplified calculation method of critical value of 3D derailment coefficient under quasi-static condition
-
摘要: 根据轮轨系统坐标系间的变换关系, 在准静态条件下建立了轮轨接触斑三维受力分析模型, 推导了考虑轮对摇头角与轮轨蠕滑力的三维脱轨系数计算公式, 得到了脱轨临界状态时三维脱轨系数临界值的计算方法; 以LMA车轮踏面与CHN60钢轨廓形为例, 分析了轮对摇头角与摩擦因数对三维脱轨系数临界值的影响规律, 并与Nadal脱轨系数临界值进行了对比; 为简化三维脱轨系数的计算方法, 根据Shen-Hedrick-Elkins蠕滑模型讨论了不同轮对摇头角、摩擦因数与垂向力条件下Kalker线性合成蠕滑力与3倍库伦摩擦力间的比值关系; 分析了横向蠕滑力与纵向蠕滑力的比值随轮对摇头角与摩擦因数的变化规律, 提出了一种准静态条件的三维脱轨系数简化计算方法, 并与精确公式计算结果进行了对比。分析结果表明: 与三维脱轨系数临界值相比, 当轮对摇头角在1.5°以内时, 纵向蠕滑力在切向力中的占比要明显大于横向蠕滑力, 造成Nadal脱轨系数临界值具有一定的保守性, 但在轮对摇头角较大时, 横向蠕滑力在切向力中的占比达到了90%以上, Nadal与三维脱轨系数临界值计算结果基本相同; 车轮脱轨临界状态下轮轨接触斑内已达到纯滑动状态, 横向蠕滑力和纵向蠕滑力的比值基本不受摩擦因数影响, 并与轮对摇头角存在强线性关系; 与精确公式相比, 三维脱轨系数简化计算方法的误差在±5%以内, 可以满足工程应用的要求。Abstract: According to the coordinate system transformation relationship in wheel-rail system, the 3 Dstress analysis model of wheel-rail contact spot was established under the quasi-static condition, the formula considering wheelset yaw angle and wheel-rail creep force for calculating3 D derailment coefficient was derived, and the calculation method of critical value of 3 D derailment coefficient was obtained when the wheel was in the critical state of derailment.Taking the LMA wheel tread and CHN60 rail profile as examples, the influence rule of wheelset yawangle and friction coefficient on the critical value of 3 Dderailment coefficient was analyzed and compared with the critical value of Nadal derailment coefficient.To simplify the calculation method of 3 Dderailment coefficient, the ratio relation between the Kalker linear synthetic creep force and the three times of Coulomb friction force was discussed according to Shen-HedrickElkins creep model under different wheelset yaw angles, friction coefficients and vertical forces.Through the analysis of variation rules of the ratios between lateral and longitudinal creep forces with different wheelset yaw angles and friction coefficients, a simplified calculation method of 3 D derailment coefficient was proposed under the quasi-static condition and compared with the exact formula.Analysis result shows that compared with the threshold of 3 Dderailment coefficient, when the wheelset yaw angle is less than 1.5°, the proportion of longitudinal creep force in the tangential force is significantly greater than that of lateral creep force, which causes the threshold of Nadal derailment coefficient to be more conservative.However, when the wheelset yaw angle is larger, the proportion of lateral creep force in the tangential force is more than 90%, and the calculated critical values of 3 Dand Nadal derailment coefficient are basically same.In addition, the wheel-rail contact spot has reached purely sliding state in the critical state of wheel derailment.The ratio between lateral and longitudinal creep force is not affected by the friction coefficient and has a strong linear relation with the wheelset yaw angle.Compared with the exact formula, the error by using the simplified method is within±5%, and the simplified method can meet the requirement of engineering application.
-

图 3 不同摩擦因数下轮轨法向力变化规律
Figure 3. Variation rules of wheel-rail normal forces under different friction coefficients

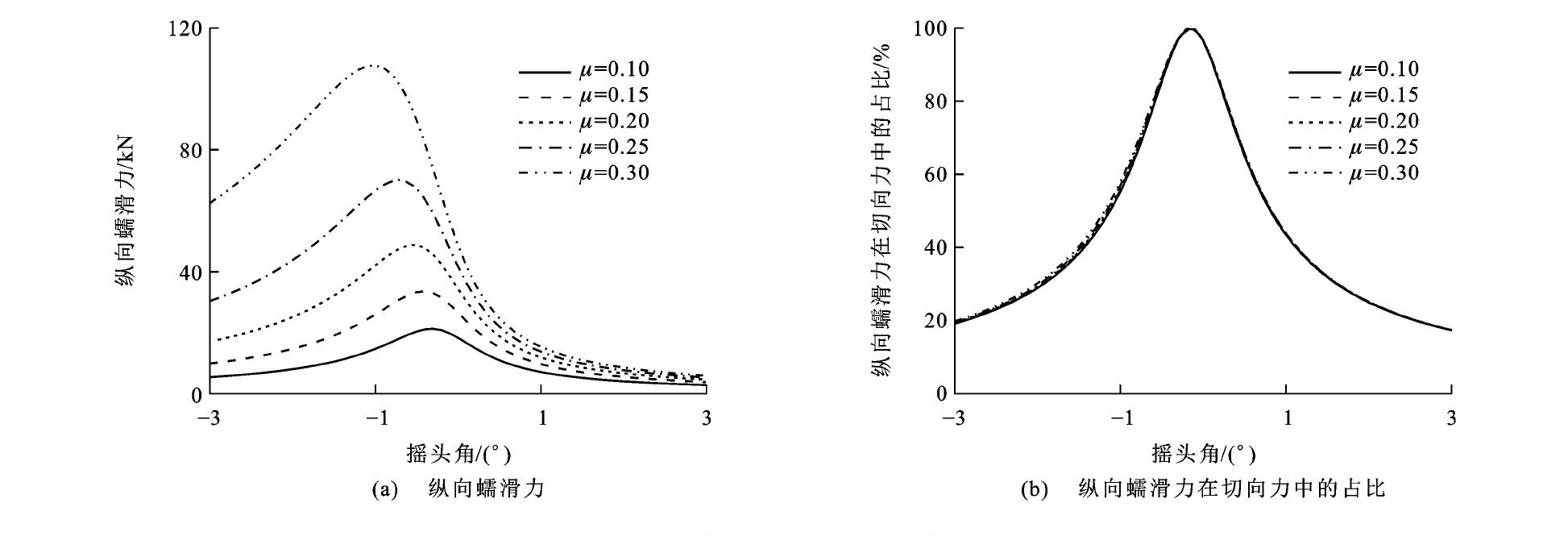
图 4 不同摩擦因数下纵向蠕滑力变化规律
Figure 4. Variation rules of longitudinal creep forces under different friction coefficients

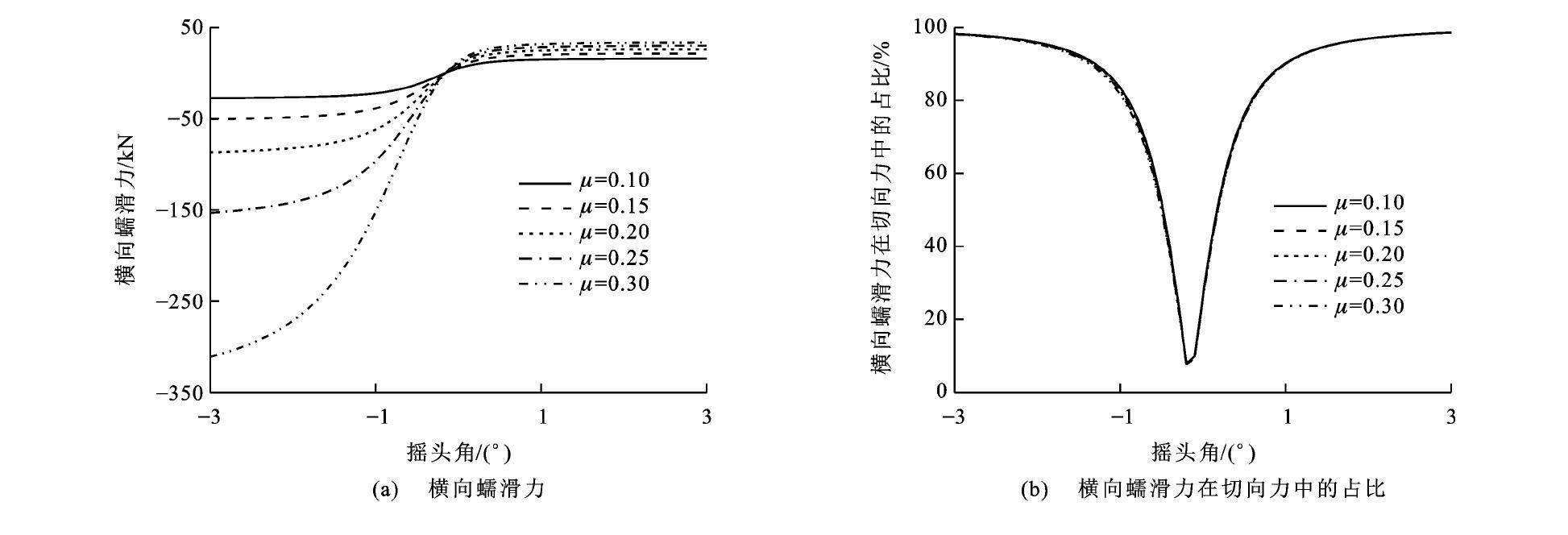
图 5 不同摩擦因数下横向蠕滑力变化规律
Figure 5. Variation rules of lateral creep forces under different friction coefficients

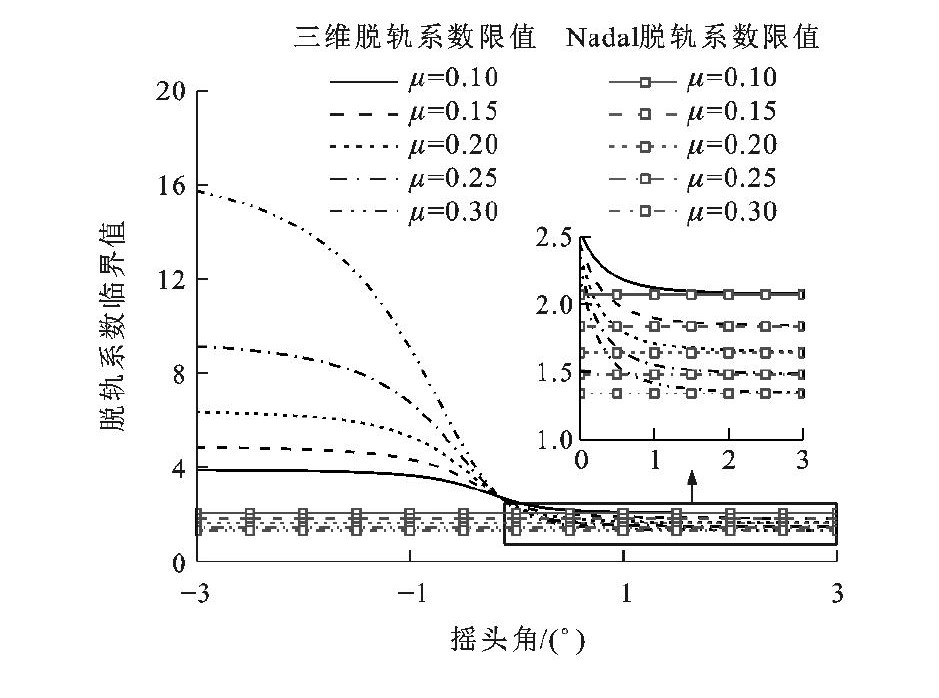
图 6 不同摩擦因数下脱轨系数临界值变化规律
Figure 6. Variation rules of critical values of derailment coefficient under different friction coefficients

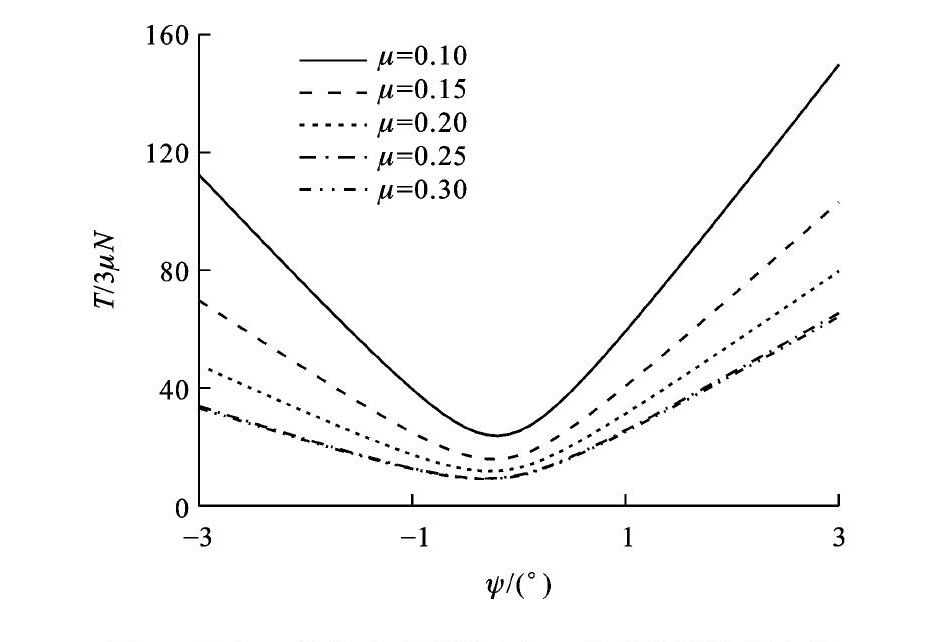
图 7 Kalker线性合成蠕滑力与3倍库伦摩擦力比值
Figure 7. Ratios of Kalker linear synthetic creep forces and 3times Coulomb frictions

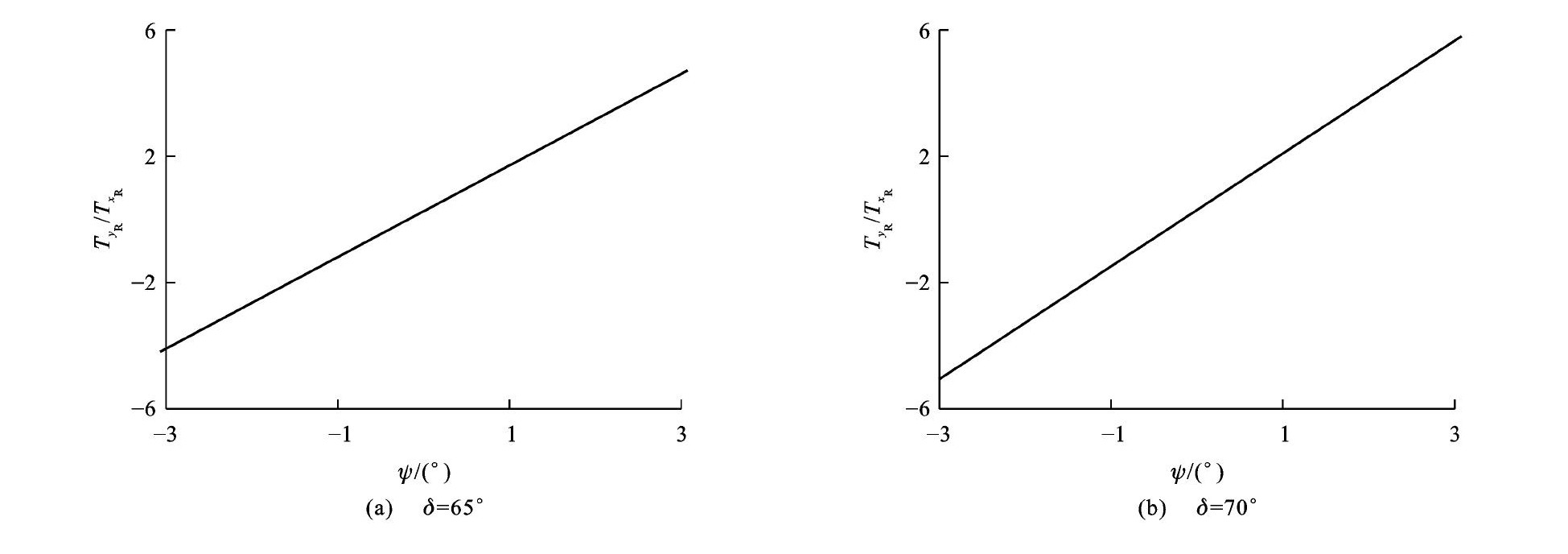
图 8 横向蠕滑力与纵向蠕滑力比值计算结果
Figure 8. Computation results of ratios of lateral creep force and longitudinal creep force

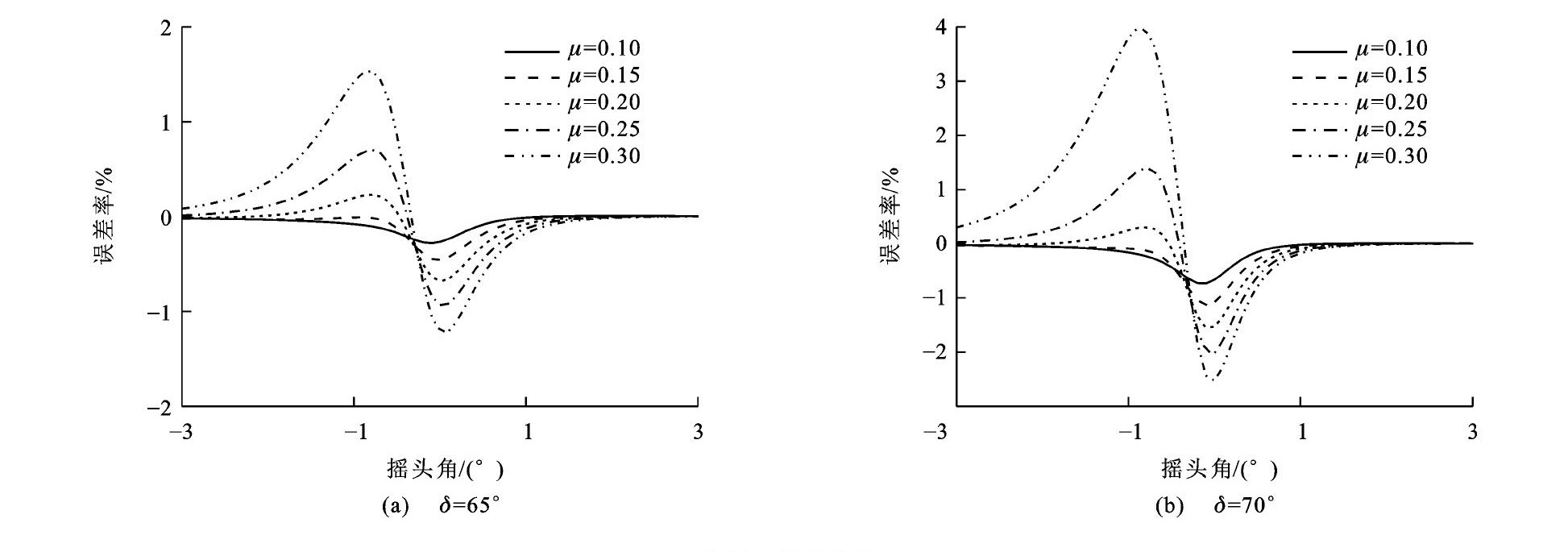
图 9 横向蠕滑力与纵向蠕滑力比值拟合结果
Figure 9. Fitting results of ratios of lateral creep force and longitudinal creep force
-
[1] 关庆华. 列车脱轨机理及运行安全性研究[D]. 成都: 西南交通大学, 2010.GUAN Qing-hua. Study on the derailment mechanism and running safety of trains[D]. Chengdu: Southwest Jiaotong University, 2010. (in Chinese). [2] 曾京. 轮对稳态脱轨准则的研究[J]. 铁道学报, 1999, 21 (6): 15-19. doi: 10.3321/j.issn:1001-8360.1999.06.004ZENG Jing. Steady-state derailment criteria of a railway wheelset[J]. Journal of the China Railway Society, 1999, 21 (6): 15-19. (in Chinese). doi: 10.3321/j.issn:1001-8360.1999.06.004 [3] 俞展猷, 李富达, 李谷. 车轮脱轨及其评价[J]. 铁道学报, 1999, 21 (3): 33-38. doi: 10.3321/j.issn:1001-8360.1999.03.007YU Zhan-you, LI Fu-da, LI Gu. Wheel derailment and its evaluation[J]. Journal of the China Railway Society, 1999, 21 (3): 33-38. (in Chinese). doi: 10.3321/j.issn:1001-8360.1999.03.007 [4] BRAGHIN F, BRUNI S, DIANA G. Experimental and numerical investigation on the derailment of a railway wheelset with solid axle[J]. Vehicle System Dynamics, 2006, 44 (4): 305-325. doi: 10.1080/00423110500337494 [5] 张卫华, 薛弼一, 吴学杰, 等. 单轮对脱轨试验及其理论分析[J]. 铁道学报, 1998, 20 (1): 39-44. doi: 10.3321/j.issn:1001-8360.1998.01.006ZHANG Wei-hua, XUE Bi-yi, WU Xue-jie, et al. Experiment and analysis of the single wheelset derailment[J]. Journal of the China Railway Society, 1998, 20 (1): 39-44. (in Chinese). doi: 10.3321/j.issn:1001-8360.1998.01.006 [6] O'SHEA J J, SHABANA A A. Analytical and numerical investigation of wheel climb at large angle of attack[J]. Nonlinear Dynamics, 2016, 83 (1/2): 555-577. [7] O'SHEA J J, SHABANA A A. Further investigation of wheel climb initiation: three-point contact[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-Body Dynamics, 2017, 231 (1): 121-132. doi: 10.1177/1464419316654402 [8] BARBOSA R S. A 3Dcontact force safety criterion for flange climb derailment of a railway wheel[J]. Vehicle System Dynamics, 2004, 42 (5): 289-300. doi: 10.1080/0042311042000266711 [9] BARBOSA R S. Safety of a railway wheelset-derailment simulation with increasing lateral force[J]. Vehicle System Dynamics, 2009, 47 (12): 1493-1510. doi: 10.1080/00423110802650024 [10] KARMEL A, SWEET L M. Evaluation of time-duration dependent wheel load criteria for wheel climb derailment[J]. Journal of Dynamic Systems, Measurement, and Control, 1981, 103 (3): 219-227. doi: 10.1115/1.3140632 [11] ELKINS J A, CARTER A. Testing and analysis techniques for safety assessment of rail vehicles: the state-of-the-art[J]. Vehicle System Dynamics, 1993, 22 (3/4): 185-208. [12] 张洪, 杨国桢. 关于客车转向架的脱轨和轮重减载问题[J]. 铁道车辆, 2005, 43 (6): 10-16. doi: 10.3969/j.issn.1002-7602.2005.06.003ZHANG Hong, YANG Guo-zhen. Derailment and wheel unloading of passenger car bogies[J]. Rolling Stock, 2005, 43 (6): 10-16. (in Chinese). doi: 10.3969/j.issn.1002-7602.2005.06.003 [13] KUO C M, LIN C C. Analysis of derailment criteria[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2016, 230 (4): 1158-1163. doi: 10.1177/0954409715583692 [14] ZENG Jing, WU Ping-bo. Study on the wheel/rail interaction and derailment safety[J]. Wear, 2008, 265 (9): 1452-1459. [15] WEI Lai, ZENG Jing, WU Ping-bo, et al. Indirect method for wheel-rail force measurement and derailment evaluation[J]. Vehicle System Dynamics, 2014, 52 (12): 1622-1641. doi: 10.1080/00423114.2014.953180 [16] 魏来, 曾京, 邬平波, 等. 基于轮对模型的铁道车辆脱轨安全性评估[J]. 铁道学报, 2015, 37 (9): 25-31. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201509004.htmWEI Lai, ZENG Jing, WU Ping-bo, et al. Derailment safety evaluation for railway vehicles based on wheelset model[J]. Journal of the China Railway Society, 2015, 37 (9): 25-31. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201509004.htm [17] YOKOSE K. A theory of the derailment of wheelset[J]. Quarterly Report of Railway Technical Research Institute, 1966, 7 (3): 30-34. [18] 曾宇清, 王卫东, 舒兴高, 等. 车辆脱轨安全评判的动态限度[J]. 中国铁道科学, 1999, 20 (4): 70-77. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK199904008.htmZENG Yu-qing, WANG Wei-dong, SHU Xing-gao, et al. Dynamic limits for derailment safety evaluation[J]. China Railway Science, 1999, 20 (4): 70-77. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGTK199904008.htm [19] 关庆华, 曾京, 陈哲明. 考虑冲角影响的改进脱轨准则[J]. 中国铁道科学, 2009, 20 (3): 74-80. doi: 10.3321/j.issn:1001-4632.2009.03.014GUAN Qing-hua, ZENG Jing, CHEN Zhe-ming. Improving the derailment criteria by taking the impact of attack angle into account[J]. China Railway Science, 2009, 20 (3): 74-80. (in Chinese). doi: 10.3321/j.issn:1001-4632.2009.03.014 [20] GUAN Qing-hua, ZENG Jing, JIN Xue-song. An angle of attack-based derailment criterion for wheel flange climbing[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2014, 228 (7): 719-729. doi: 10.1177/0954409713490149 [21] 杨春雷, 翟婉明. 车辆动力学仿真中评判脱轨的直接方法[J]. 交通运输工程学报, 2002, 2 (3): 23-26. doi: 10.3321/j.issn:1671-1637.2002.03.005YANG Chun-lei, ZHAI Wan-ming. Direct method for evaluation of wheel derailment in simulation of railway vehicle dynamics[J]. Journal of Traffic and Transportation Engineering, 2002, 2 (3): 23-26. (in Chinese). doi: 10.3321/j.issn:1671-1637.2002.03.005 [22] 陈果, 翟婉明, 左洪福. 车辆脱轨安全限值的调整与改进建议[J]. 中国机械工程, 2002, 13 (8): 646-649. doi: 10.3321/j.issn:1004-132X.2002.08.006CHEN Guo, ZHAI Wan-ming, ZUO Hong-fu. Suggestions of adjustment and improvement on vehicle derailment safety limit value[J]. China Mechanical Engineering, 2002, 13 (8): 646-649. (in Chinese). doi: 10.3321/j.issn:1004-132X.2002.08.006 [23] 曾庆元, 向俊, 娄平, 等. 列车脱轨的力学机理与防止脱轨理论[J]. 铁道科学与工程学报, 2004, 1 (1): 19-31. doi: 10.3969/j.issn.1672-7029.2004.01.005ZENG Qing-yuan, XIANG Jun, LOU Ping, et al. Mechanical mechanism of derailment and theory of derailment prevention[J]. Journal of Railway Science and Engineering, 2004, 1 (1): 19-31. (in Chinese). doi: 10.3969/j.issn.1672-7029.2004.01.005 [24] SHEN Zhi-yun, HEDRICK J K, ELKINS J A. A comparison of alternative creep force models for rail vehicle dynamic analysis[J]. Vehicle System Dynamics, 1983, 12 (1-3): 79-83. doi: 10.1080/00423118308968725 [25] 贾小勇, 徐传胜, 白欣. 最小二乘法的创立及其思想方法[J]. 西北大学学报: 自然科学版, 2006, 36 (3): 507-511. doi: 10.3321/j.issn:1000-274X.2006.03.040JIA Xiao-yong, XU Chuan-sheng, BAI Xin. The invention and way of thinking on least squares[J]. Journal of Northwest University: Natural Science Edition, 2006, 36 (3): 507-511. (in Chinese. doi: 10.3321/j.issn:1000-274X.2006.03.040 -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 726
- HTML全文浏览量: 307
- PDF下载量: 761
- 被引次数: 0
