

Design method of active suspension LQG controller for rolling motion safety of vehicle
-
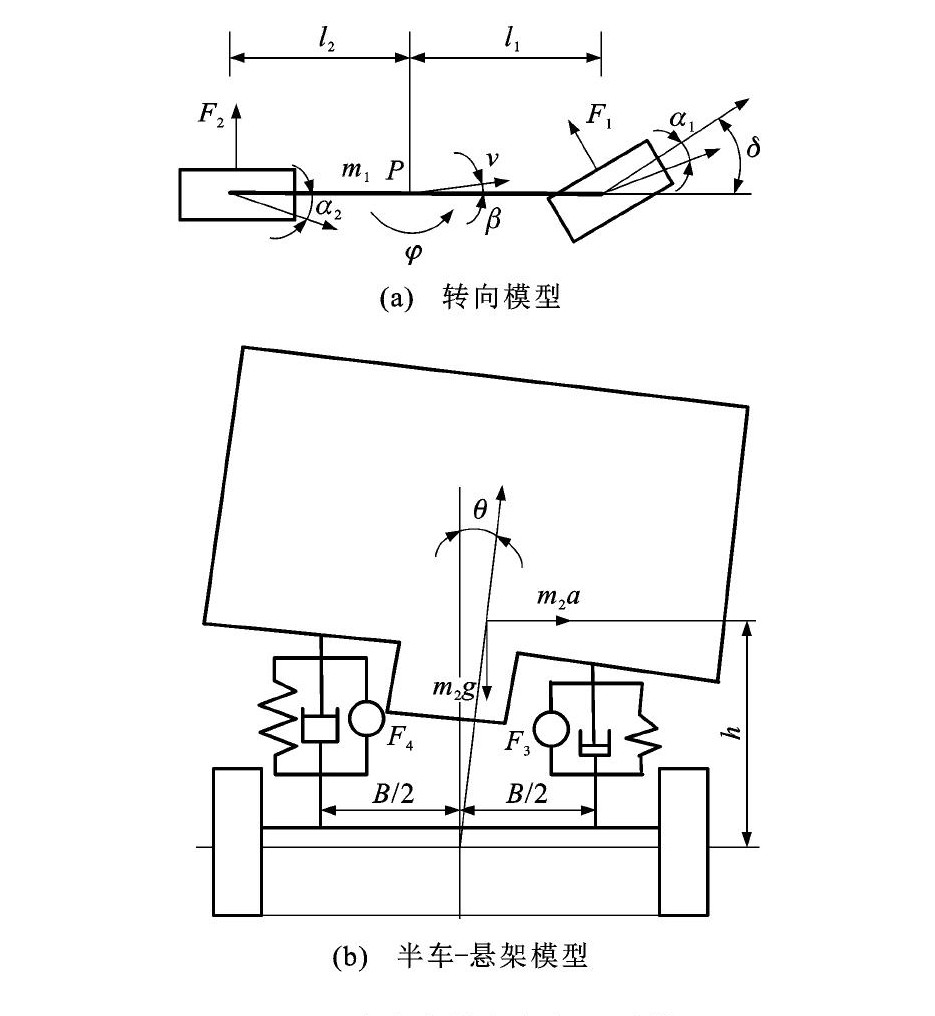
摘要: 为了提高汽车转向-侧倾运动的安全性, 设计了主动悬架侧倾运动安全LQG控制器; 建立了3自由度汽车转向-侧倾运动动力学模型, 选择横向载荷转移率、侧倾角及其加速度构建汽车侧倾安全综合性能评价指标; 为了解决现有设计方法无法跟踪系统干扰项(前轴转向角) 和控制加权矩阵行列式等于零带来的控制向量无法求解的难题, 将前轴转向角进行满足最小相位系统的微分变形, 并与原系统方程组成增广系统方程, 在综合性能评价指标中引入包含控制项的无穷小量, 以满足LQG控制器设计条件; 结合层次分析法和归一法, 以鱼钩工况为基础, 仿真获取汽车转向-侧倾运动统计数据, 进而确定LQG控制器的加权系数, 通过多工况数值仿真验证主动悬架侧倾运动安全LQG控制器的工作效果。仿真结果表明: 新设计的LQG控制器不干扰驾驶人的转向操纵; 与被动悬架相比, 在鱼钩工况、蛇形穿桩工况和双移线工况下, 采用LQG控制器的主动悬架可使汽车侧倾运动安全的主要评价指标即横向载荷转移率的方差分别降低了32.08%、32.82%、29.24%, 侧倾角的方差分别降低了47.74%、44.19%、63.41%, 侧倾角加速度的方差分别降低了87.30%、60.00%、86.39%, 说明采用新设计LQG控制器的主动悬架可大幅度改善汽车侧倾运动安全性, 且具有良好的转向工况适应性。Abstract: To improve the steering-rolling motion safety of vehicle, a LQG controller for active suspension was developed.A dynamics model with 3 degrees of freedom depicting vehicle steering-rolling motion was established.Lateral-load transfer ratio (LTR), rolling angle and its acceleration were chosen to construct the evaluating indexes of comprehensive performance for vehicle rolling motion safety.In order to solve the problem that the general design approachs couldn't track the system disturbance term, namely the steered angle of front axle, and the control vector couldn't be solved because the determinant of weighted control coefficient matrix equaled to zero, the new method was scheduled as follows: the steered angle of front axle was introduced into a differential equation in accord with the minimum phase system, the differential equation was combined with the original system equation into an augmented system equation, andthe infinitely small terms including control terms were added to the evaluating indexes of comprehensive performance to meet the design condition of LQG controller.Based on the analytic hierarchy process (AHP) and normalization method, the statistical data of automotive steering-rolling motion were obtained by simulation under fish-hook working condition, and then the weighted coefficients of LQG controller were determined.The working effects of LQG controller of active suspension for steering-rolling motion safety of vehicle were verified by numerical simulation under multiple working conditions.Simulation result shows that the developed LQG controller does not interfere with the steering operation of driver.Compared with the passive suspension, when the active suspension is regulated by the developed LQG controller under fish-hook working condition, slalom working condition and double-lane change working condition, the variances of LTR, namely the most important evaluating index of rolling motion safety, decrease by 32.08%, 32.82%, and 29.24%, respectively, the variances of rolling angle reduce by 47.74%, 44.19%, and 63.41%, respectively, and the variances of rolling angle acceleration reduce by 87.30%, 60.00%, and 86.39%, respectively.So, adopting the active suspension with the new developed LQG controller can significantly improve the rolling motion safety of vehicle and achieve good steering condition adaptability.
-

图 2 鱼钩工况下前轴转角曲线
Figure 2. Curve of steered angle on front axle under fish-hook working condition

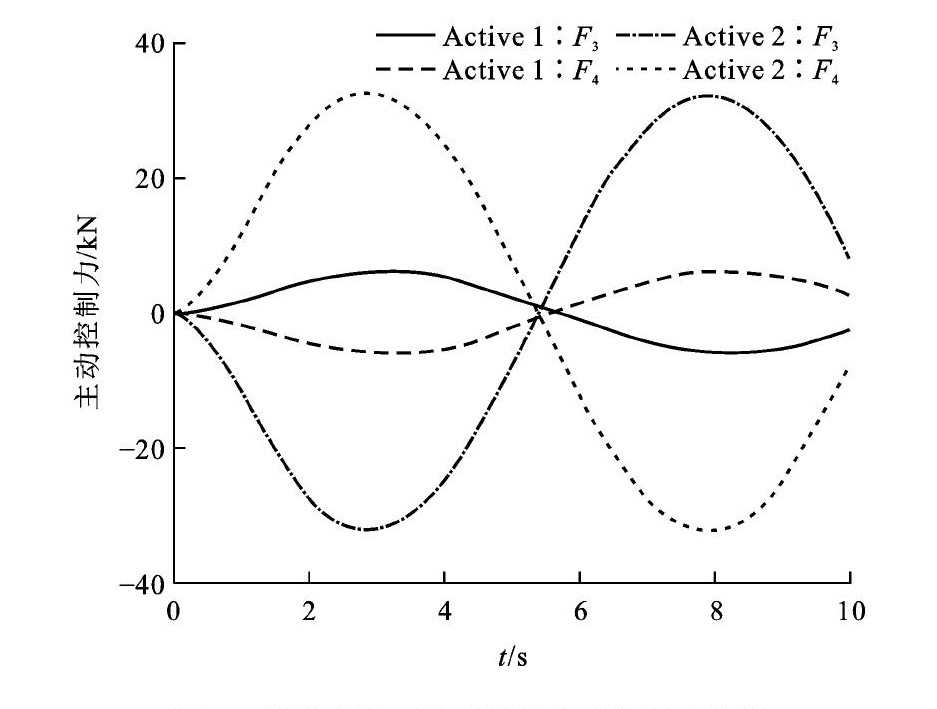
图 3 鱼钩工况下悬架主动控制力曲线
Figure 3. Curves of active control forces of suspensions under fish-hook working condition

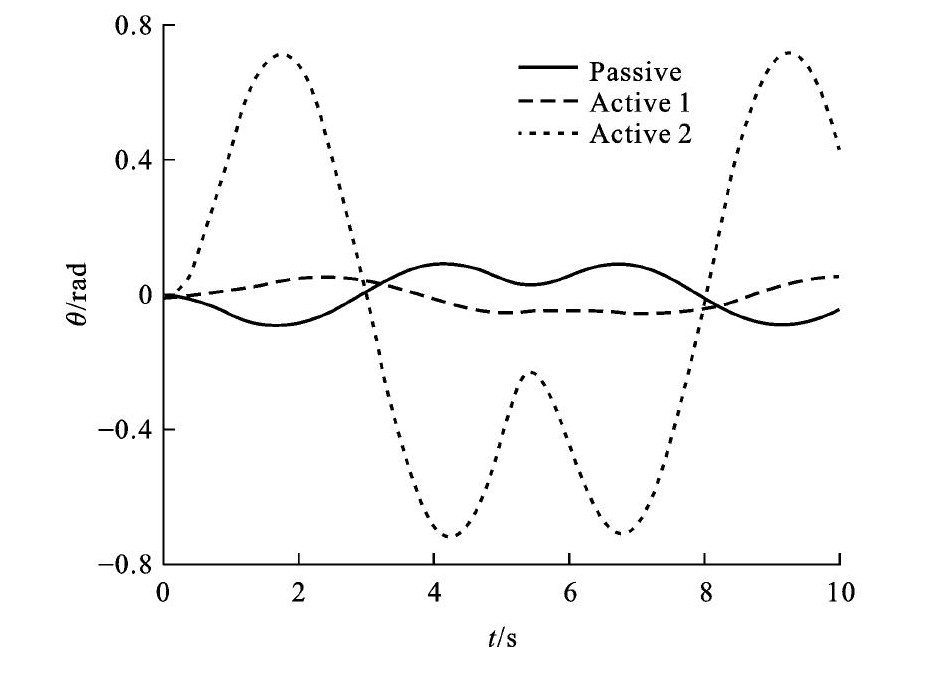
图 4 鱼钩工况下侧倾角加速度曲线
Figure 4. Curves of roll angle accelerations under fish-hook working condition

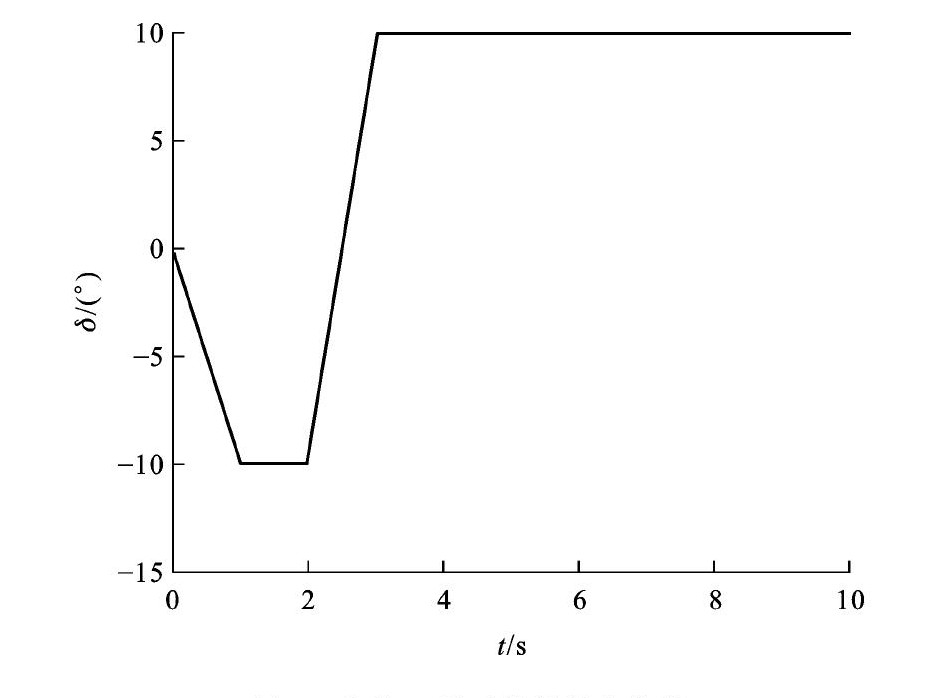
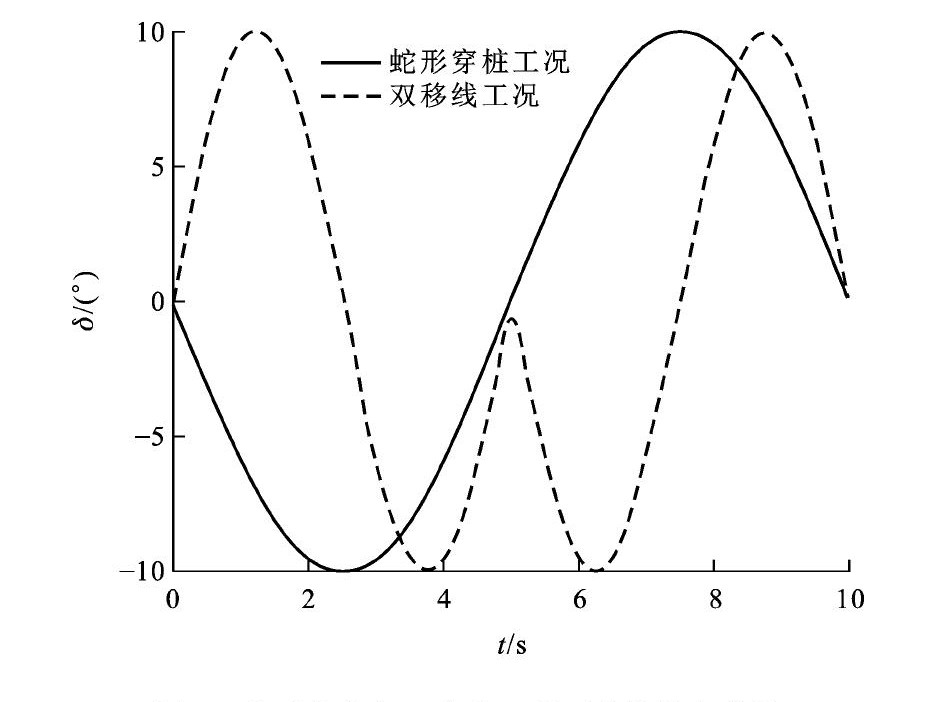
图 8 蛇形穿桩与双移线工况下前轴转角曲线
Figure 8. Curves of steered angle on front axle under slalom and double-lane change working conditions

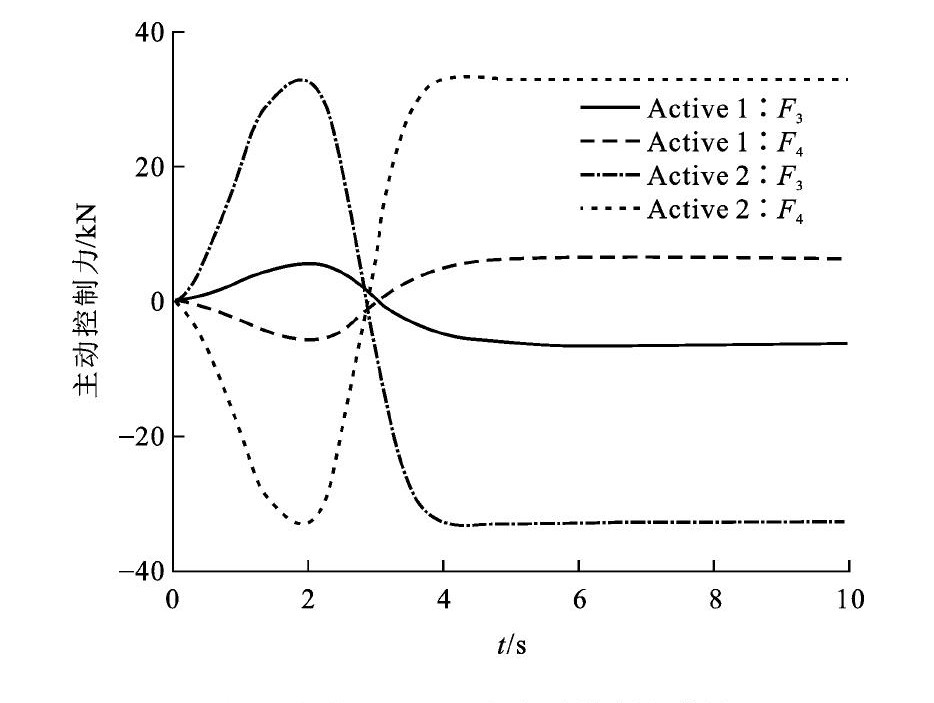
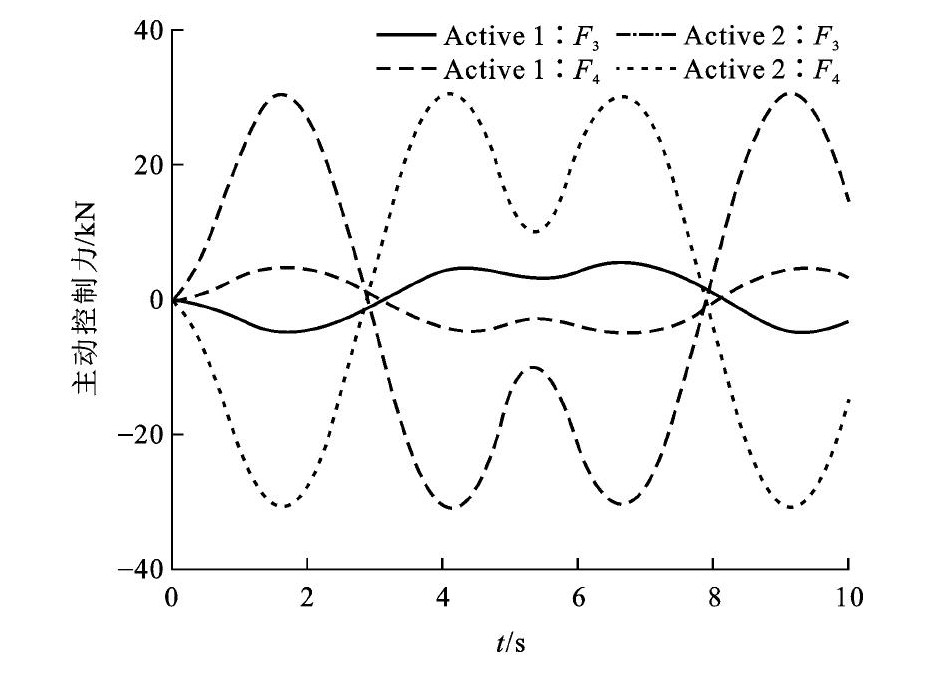
图 9 蛇形穿桩工况下悬架主动控制力曲线
Figure 9. Curves of active control forces of suspensions under slalom working condition

图 10 蛇形穿桩工况下侧倾角加速度曲线
Figure 10. Curves of roll angle accelerations under slalom working condition

图 13 双移线工况下悬架主动控制力曲线
Figure 13. Curves of active control forces of suspensions under double-lane change working condition

图 14 双移线工况下侧倾角加速度曲线
Figure 14. Curves of roll angle accelerations under double-lane change working condition

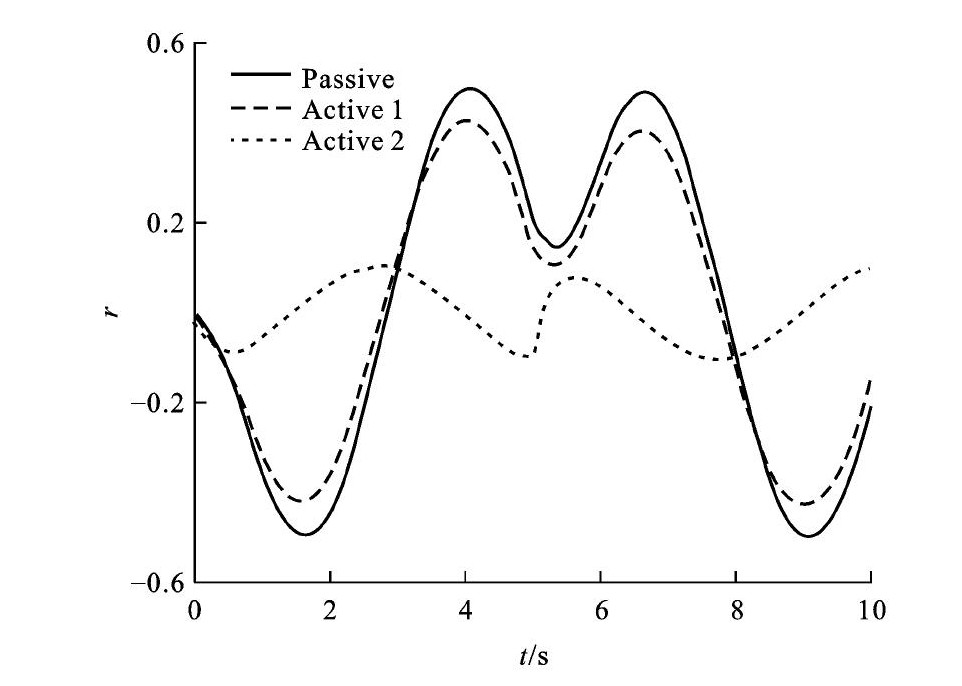
图 15 双移线工况下横向载荷转移率曲线
Figure 15. Curves of LTRs under double-lane change working condition

图 16 双移线工况下侧倾角曲线
Figure 16. Curves of roll angles under double-lane change working condition
表 2 性能评价指标主观加权判断矩阵
Table 2. Judgment matrix of subjective weights of performance evaluating indexes

 下载: 导出CSV
下载: 导出CSV
-
[1] FARMER C M, LUND A K. Rollover risk of cars and light trucks after accounting for driver and environmental factors[J]. Accident Analysis and Prevention, 2002, 34 (2): 163-173. doi: 10.1016/S0001-4575(01)00010-0 [2] CHENG C, CEBON D. Improving roll stability of articulated heavy vehicles using active semi-trailer steering[J]. Vehicle System Dynamics, 2008, 46 (S1): 373-388. [3] YOON J, CHO W, KANG Ju-yong, et al. Design and evaluation of a unified chassis control system for rollover prevention and vehicle stability improvement on a virtual test track[J]. Control Engineering Practice, 2010, 18 (6): 585-597. doi: 10.1016/j.conengprac.2010.02.012 [4] VAN DER WESTHUIZEN S F, ELS P S. Slow active suspension control for rollover prevention[J]. Journal of Terramechanics, 2013, 50 (1): 29-36. doi: 10.1016/j.jterra.2012.10.001 [5] CHEN Shi-an, WANG Jun-cheng, YAO Ming, et al. Improved optimal sliding mode control for a non-linear vehicle active suspension system[J]. Journal of Sound and Vibration, 2017, 395: 1-25. doi: 10.1016/j.jsv.2017.02.017 [6] JIN Xian-jian, YIN Guo-dong, BIAN Cheng-tong, et al. Gain-scheduled vehicle handling stability control via integration of active front steering and suspension systems[J]. Journal of Dynamic Systems, Measurement, and Control, 2016, 138 (1): 1-12. [7] 黄志刚, 毛恩荣, 梁新成, 等. 汽车悬架发展的研究[J]. 机械设计与制造, 2006 (11): 168-169. doi: 10.3969/j.issn.1001-3997.2006.11.071HUANG Zhi-gang, MAO En-rong, LIANG Xin-cheng, et al. Study of automobile's suspension development[J]. Machinery Design and Manufacture, 2006 (11): 168-169. (in Chinese). doi: 10.3969/j.issn.1001-3997.2006.11.071 [8] ACARMAN T, ÖZGÜNER Ü. Rollover prevention for heavy trucks using frequency shaped sliding mode control[J]. Vehicle System Dynamics, 2006, 44 (10): 737-762. doi: 10.1080/00423110600610402 [9] YIM Seong-jin, PARK Y, YI K. Design of active suspension and electronic stability program for rollover prevention[J]. International Journal of Automotive Technology, 2010, 11 (2): 147-153. doi: 10.1007/s12239-010-0020-6 [10] YIM Seong-jin. Design of a robust controller for rollover prevention with active suspension and differential braking[J]. Journal of Mechanical Science and Technology, 2012, 26 (1): 213-222. doi: 10.1007/s12206-011-0915-9 [11] 郭全民, 雷蓓蓓. 半主动悬架PID控制的研究和优化[J]. 国外电子测量技术, 2015, 34 (4): 60-63. doi: 10.3969/j.issn.1002-8978.2015.04.014GUO Quan-min, LEI Bei-bei. Research and optimization for semi-active suspension PID control[J]. Foreign Electronic Measurement Technology, 2015, 34 (4): 60-63. (in Chinese). doi: 10.3969/j.issn.1002-8978.2015.04.014 [12] 陈杰平, 冯武堂, 郭万山, 等. 整车磁流变减振器半主动悬架变论域模糊控制策略[J]. 农业机械学报, 2011, 42 (5): 7-13, 19. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201105001.htmCHEN Jie-ping, FENG Wu-tang, GUO Wan-shan, et al. Whole vehicle magneto-rheological fluid damper semi-active suspension variable universe fuzzy control simulation and test[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42 (5): 7-13, 19. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201105001.htm [13] BALAKRISHNAN B M, RAJARAM M. Investigations on vehicle rollover prevention using LQG regulator[J]. Advances in Mathematical Physics, 2014: 1-11. [14] 廖聪, 吴新烨, 黄红武. 客车半主动悬架防侧翻模糊滑模控制[J]. 厦门大学学报: 自然科学版, 2014, 53 (3): 373-377. https://www.cnki.com.cn/Article/CJFDTOTAL-XDZK201403017.htmLIAO Cong, WU Xin-ye, HUANG Hong-wu. Semi-active suspension anti rollover control for bus using fuzzy sliding mode theory[J]. Journal of Xiamen University: Natural Science, 2014, 53 (3): 373-377. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDZK201403017.htm [15] CHAI Ling-jiang, SUN Tao. The design of LQG controller for active suspension based on analytic hierarchy process[J]. Mathematical problems in Engineering, 2010: 1-19. [16] MIÈGE A J P, CEBON D. Active roll control of an experimental articulated vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2005, 219 (6): 791-806. doi: 10.1243/095440705X28385 [17] 周博, 申海龙. 基于ADAMS的汽车侧翻仿真分析[J]. 大连交通大学学报, 2017, 38 (5): 27-32. https://www.cnki.com.cn/Article/CJFDTOTAL-DLTD201705008.htmZHOU Bo, SHEN Hai-long. Analysis and research of vehicle rollover simulation based on ADAMS[J]. Journal of Dalian Jiaotong University, 2017, 38 (5): 27-32. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLTD201705008.htm [18] 靳立强, 石冠男, 于雅静, 等. 基于零力矩点位置和模糊控制的商用车防侧翻控制[J]. 汽车工程, 2017, 39 (9): 1062-1067. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201709013.htmJIN Li-qiang, SHI Guan-nan, YU Ya-jing, et al. Anti-roll control for commercial vehicles based on zero-moment point position and fuzzy control[J]. Automotive Engineering, 2017, 39 (9): 1062-1067. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201709013.htm [19] 余强, 马建. 主动悬架系统对汽车侧翻稳定性改善分析[J]. 中国公路学报, 2005, 18 (3): 114-117. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200503024.htmYU Qiang, MA Jian. Analysis of improvement on automobile side tumbling stability with active suspension system[J]. China Journal of Highway and Transport, 2005, 18 (3): 114-117. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL200503024.htm [20] YU Jing, CHEN Xiao-qian, CHEN Li-hu. Optimal planning of LEO active debris removal based on hybrid optimal control theory[J]. Advances in Space Research, 2015, 55 (11): 2628-2640. doi: 10.1016/j.asr.2015.02.026 [21] 柴陵江, 孙涛, 冯金芝, 等. 基于层次分析法的主动悬架LQG控制器设计[J]. 汽车工程, 2010, 32 (8): 712-718. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201008016.htmCHAI Ling-jiang, SUN Tao, FENG Jin-zhi, et al. design of the LQG controller for active suspension system based on analytic hierarchy process[J]. Automotive Engineering, 2010, 32 (8): 712-718. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201008016.htm [22] 陈士安, 邱峰, 何仁, 等. 一种确定车辆悬架LQG控制加权系数的方法[J]. 振动与冲击, 2008, 27 (2): 65-68, 176. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200802013.htmCHEN Shi-an, QIU Feng, HE Ren, et al. A method for choosing weights in a suspension LQG control[J]. Journal of Vibration and Shock, 2008, 27 (2): 65-68, 176. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200802013.htm [23] 杨益民, 杨旭兵, 景奉杰. 层次分析法中整体一致性判别及校正[J]. 武汉大学学报: 理学版, 2004, 50 (3): 306-310. https://www.cnki.com.cn/Article/CJFDTOTAL-WHDY200403011.htmYANG Yi-min, YANG Xu-bing, JING Feng-jie. Judgment and correction of global consistency in AHP[J]. Journal of Wuhan University: Natural Science Edition, 2004, 50 (3): 306-310. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WHDY200403011.htm [24] 金智林. 运动型多功能汽车侧翻稳定性及防侧翻控制[D]. 南京: 南京航空航天大学, 2008.JIN Zhi-lin. Rollover stability and anti-roll control for sport utility vehicles[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008. (in Chinese). [25] CAI Yu-meng, JIANG You-liang, ZHANG Shi-jin, et al. Development and optimisation of an articulation system to improve intersection turning speed of bus rapid transit vehicle[J]. International Journal of Heavy Vehicle Systems, 2015, 22 (3): 213-235. -














计量
- 文章访问数: 814
- HTML全文浏览量: 265
- PDF下载量: 434
- 被引次数: 0
