

Conformal detection algorithm of anomalous behaviors of vessel
Article Text (Baidu Translation)
-
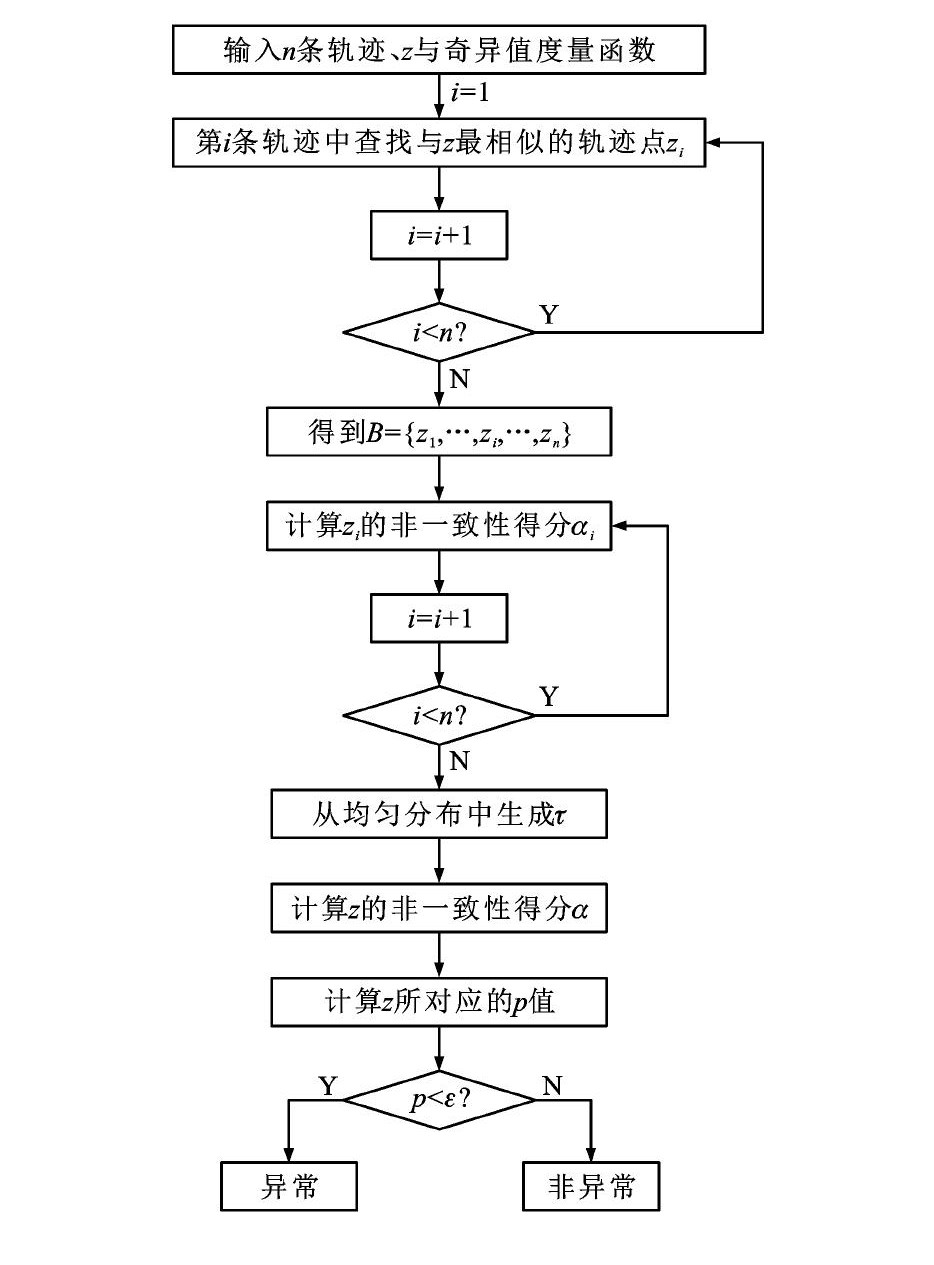
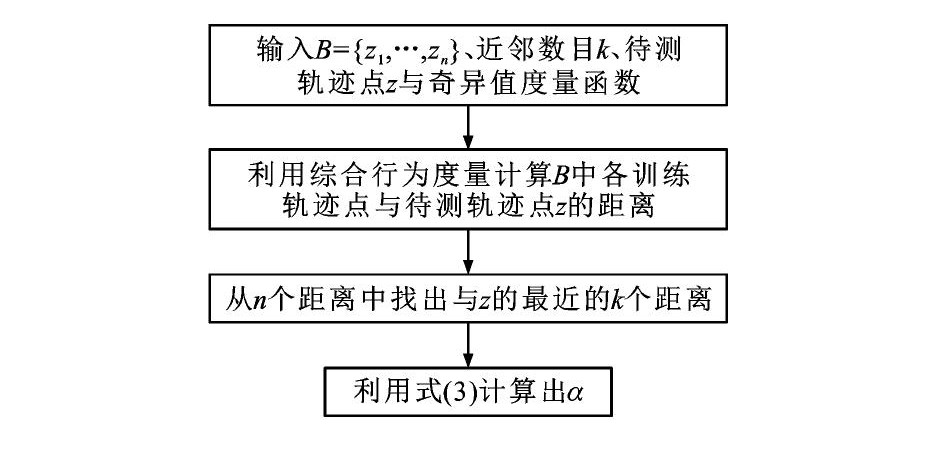
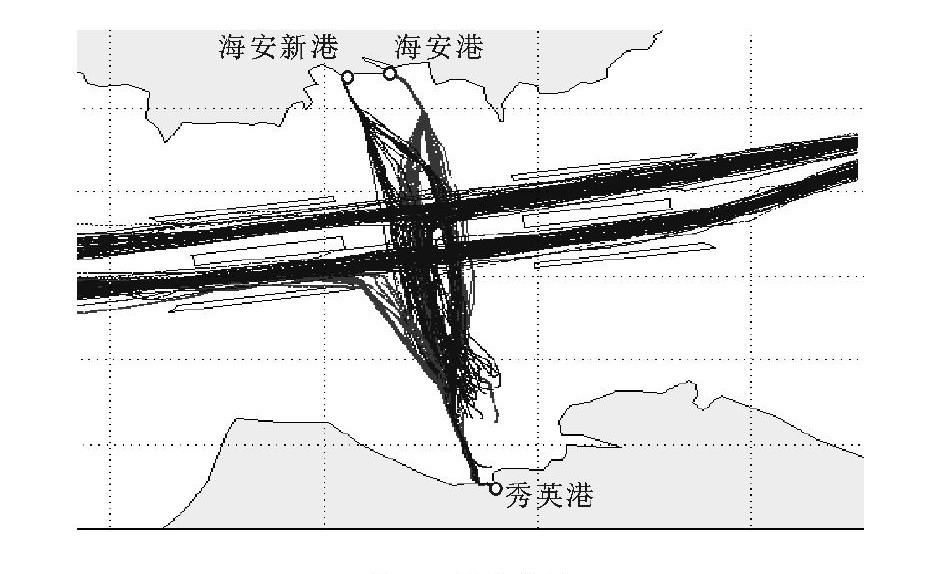
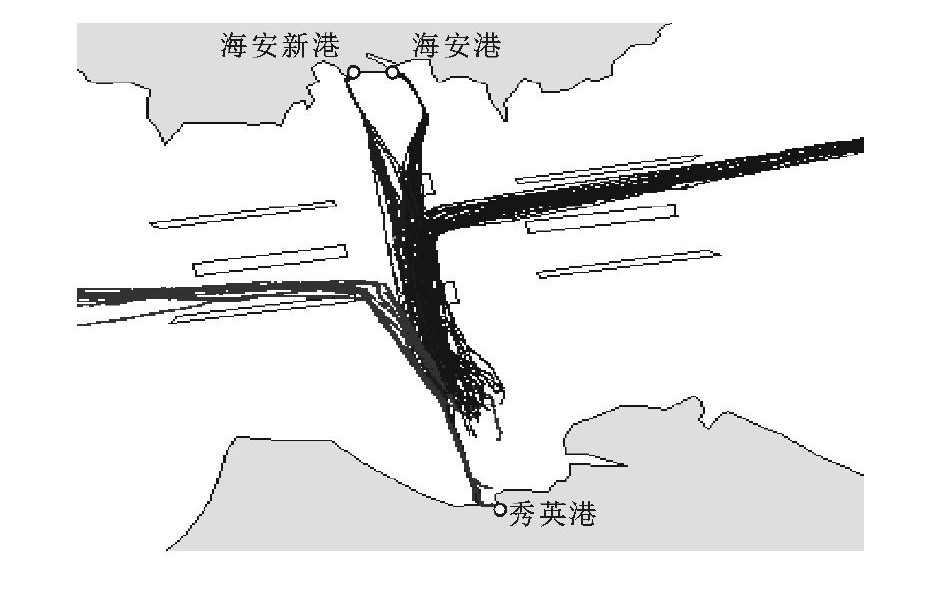
摘要: 为了准确检测船舶的操纵异常行为和降低异常行为误报警率, 提出了船舶异常行为的一致性检测算法; 在船舶轨迹点中引入能够体现操纵模式的特征, 以转向行为与变速行为度量了操纵行为相似性; 将空间位置相似性与操纵行为相似性进行组合, 定义了船舶综合行为相似性, 计算了单个轨迹点与训练轨迹序列中的最近邻特征点, 构建了一致性检测的样本序列; 为克服样本重叠的类分布情形, 改进了一致性检测算法的奇异值度量, 并用综合行为相似性计算样本间的非一致性得分, 利用单个轨迹点的随机性检验值判断该轨迹点与样本序列的分布一致性; 以琼州海峡实测AIS数据作为正常数据, 以计算机模拟随机产生异常轨迹和人工自定义操纵异常行为作为异常数据, 分别进行异常检测试验。试验结果表明: 随机产生的异常轨迹检测正确率为100%, 但是轨迹评价集中有一部分正常轨迹被错误划分成异常轨迹, 在指定置信度水平分别为99.0%和99.7%的情形下, 误报警率分别为0.6%和0.2%, 分别低于显著性水平0.01和0.003, 因此, 利用一致性检测算法能有效检测计算机产生的随机异常轨迹, 并可通过指定显著性水平严格控制检测误报警率, 能有效检测人工自定义的船舶变速与转向异常行为, 而且检测结果能随船舶行为改变而变化。Abstract: In order to accurately detect the anomalous maneuvering behaviors of ship and reduce the false alarm rate of anomalous behaviors, a conformal detection algorithm of anomalous behaviors was proposed.Some characteristics was introduced into the trajectory points of ship to reflect the maneuvering modes, and the similarity of maneuvering behavior was measured through altering course behavior and speed-changing behavior.The integrated behavior similarity of ship was defined by combining the spatial location similarity and the maneuvering behavior similarity, the nearest neighbor feature points of single track points on training trajectory sequence were calculated, and the conformal detection sample sequence was constructed.In order to overcome the sample overlapping situation of class distribution, the singular value measure of conformal detection algorithm was improved, the nonconformance score between the samples was calculated by the integrated behavior similarity, and the randomness test value of single track point wasused to determine the distribution conformance of trajectory point and sample sequence.The real AIS data of Qiongzhou Strait were taken as the normal data, the random anomalous trajectories were simulated by the computer, the artificial abnormal maneuvering behaviors were defined, and the abnormal detection tests were carried out.Experimental result shows that the detecting accuracy rate of random anomalous behaviors is 100%, but a part of normal trajectories in the set of evaluation trajectories are divided into anomalous trajectories by mistake.When the confidence levels are 99.0% and 99.7%, respectively, the false alarm rates are 0.6% and 0.2%, respectively, and less than the significance levels of 0.01 and 0.003, respectively.Therefore, the algorithm can effectively detect the random abnormal trajectory generated by the computer, strictly control the false alarm rate by using designated significance level, and detect artificial changing speed and altering course abnormal behaviors, and the test result changes with the change of ship behavior.
-
Key words:
- ship engineering /
- trajectory /
- AIS data /
- anomalous behavior /
- anomalous detection /
- conformal detection
-
[1] 朱飞祥, 张英俊, 高宗江. 基于数据挖掘的船舶行为研究[J]. 中国航海, 2012, 35 (2): 50-54. doi: 10.3969/j.issn.1000-4653.2012.02.011ZHU Fei-xiang, ZHANG Ying-jun, GAO Zong-jiang. Research on ship behaviors based on data mining[J]. Navigation of China, 2012, 35 (2): 50-54. (in Chinese). doi: 10.3969/j.issn.1000-4653.2012.02.011 [2] VESPE M, VISENTINI I, BRYAN K, et al. Unsupervised learning of maritime traffic patterns for anomaly detection[C]//IEEE. 9th IET Data Fusion and Target Tracking Conference: Algorithms and Applications. New York: IEEE, 2012: 1-5. [3] 陈金海, 陆锋, 彭国均. 海洋运输船舶轨迹分析研究进展[J]. 中国航海, 2012, 35 (3): 53-57. doi: 10.3969/j.issn.1000-4653.2012.03.012CHEN Jin-hai, LU Feng, PENG Guo-jun. The progress of research in maritime vessel trajectory analysis[J]. Navigation of China, 2012, 35 (3): 53-57. (in Chinese). doi: 10.3969/j.issn.1000-4653.2012.03.012 [4] PALLOTTA G, VESPE M, BRYAN K. Vessel pattern knowledge discovery from AIS data: a framework for anomaly detection and route prediction[J]. Entropy, 2013, 15 (6): 2288-2315. [5] MORRIS B, TRIVEDI M. A survey of vision-based trajectory learning and analysis for surveillance[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2008, 18 (8): 1114-1127. doi: 10.1109/TCSVT.2008.927109 [6] SILVERIA P A M, TEIXEIRA A P, GUEDES SOARES C. Use of AIS data to characterise marine traffic patterns and ship collision risk off the coast of Portugal[J]. Journal of Navigation, 2013, 66: 879-898. doi: 10.1017/S0373463313000519 [7] PALLOTTA G, VESPE M, BRYAN K. Traffic knowledge discovery from AIS data[C]//IEEE. 16th International Conference on Information Fusion. New York: IEEE, 2013: 1996-2003. [8] CHEN Chun-hsien, KHOO Li-pheng, CHONG Yih-tng, et al. Knowledge discovery using genetic algorithm for maritime situational awareness[J]. Expert Systems with Applications, 2014, 41 (2): 2742-2753. [9] MORRIS B, TRIVEDI M. Learning trajectory patterns by clustering: experimental studies and comparative evaluation[C]//IEEE. 2009 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2009: 312-319. [10] DAHLBOM A, NIKLASSON L. Trajectory clustering for coastal surveillance[C]//IEEE. 10th International Conference on Information Fusion. New York: IEEE, 2007: 1-8. [11] LAXHAMMAR R, FALKMAN G, SVIESTINS E. Anomaly detection in sea traffic-a comparison of the Gaussian Mixture Model and the Kernel Density Estimaton[C]//IEEE. 12th International Conference on Information Fusion. New York: IEEE, 2009: 756-763. [12] RISTIC B, LASCALA B, MORELANDE M, et al. Statistical analysis of motion patterns in AIS data: anomaly detection and motion prediction[C]//IEEE. 11th International Conference on Information Fusion. Cologne: IEEE, 2008: 1-7. [13] MASCARO S, NICHOLSO A E, KORB K B. Anomaly detection in vessel tracks using Bayesian networks[J]. International Journal of Approximate Reasoning, 2014, 55 (1): 84-98. doi: 10.1016/j.ijar.2013.03.012 [14] 肖潇, 邵哲平, 潘家财, 等. 基于AIS信息的船舶轨迹聚类模型及应用[J]. 中国航海, 2015, 38 (2): 82-86. doi: 10.3969/j.issn.1000-4653.2015.02.020XIAO Xiao, SHAO Zhe-ping, PAN Jia-cai, et al. Ship trajectory clustering model based on AIS data and its application[J]. Navigation of China, 2015, 38 (2): 82-86. (in Chinese). doi: 10.3969/j.issn.1000-4653.2015.02.020 [15] 马文耀, 吴兆麟, 杨家轩, 等. 基于单向距离的谱聚类船舶运动模式辨识[J]. 重庆交通大学学报: 自然科学版, 2015, 34 (5): 130-134. https://www.cnki.com.cn/Article/CJFDTOTAL-CQJT201505026.htmMA Wen-yao, WU Zhao-lin, YANG Jia-xuan, et al. Vessel motion pattern recognition based on One-Way distance spectral clustering algorithm[J]. Journal of Chongqing Jiaotong University: Natural Science, 2015, 34 (5): 130-134. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CQJT201505026.htm [16] 甄荣, 邵哲平, 潘家财, 等. 基于统计学理论的船舶轨迹异常识别[J]. 集美大学学报: 自然科学版, 2015, 20 (3): 193-197. doi: 10.3969/j.issn.1007-7405.2015.03.006ZHEN Rong, SHAO Zhe-ping, PAN Jia-cai, et al. A study on the identification of abnormal ship trajectory based on statistic theories[J]. Journal of Jimei University: Natural Science, 2015, 20 (3): 193-197. (in Chinese). doi: 10.3969/j.issn.1007-7405.2015.03.006 [17] LANE R O, NEVELL D A, HAYWARD S D, et al. Maritime anomaly detection and threat assessment[C]//IEEE. 13th International Conference on Information Fusion. New York: IEEE, 2010: 1-8. [18] KOWALSKA K, PEEL L. Maritime anomaly detection using Gaussian Process active learning[C]//IEEE. 15th International Conference on Information Fusion. New York: IEEE, 2012: 1164-1171. [19] DEVRIES G K D, VAN SOMEREN M. Machine learning for vessel trajectories using compression, alignments and domain knowledge[J]. Expert Systems with Applications, 2012, 39 (18): 13426-13439. doi: 10.1016/j.eswa.2012.05.060 [20] KAZEMI S, ABGHARI S, LAVESSON N, et al. Open data for anomaly detection in maritime surveillance[J]. Expert Systems with Applications, 2013, 40 (14): 5719-5729. doi: 10.1016/j.eswa.2013.04.029 [21] VOVK V, GAMMERMAN A, SHAFER G. Algorithmic Learning in A Random World[M]. Berlin: Springer, 2005. [22] 王华珍. 带置信度分类器的研究与应用[D]. 厦门: 厦门大学, 2009.WANG Hua-zhen. Research and application of classifier with confidence[D]. Xiamen: Xiamen University, 2009. (in Chinese). [23] GAMMERMAN A, VOVK V. Hedging predictions in machine learning[J]. Computer Journal, 2007, 50 (2): 151-163. doi: 10.1093/comjnl/bxl065 [24] PAPADOPOULOS H, VOVK V, GAMMERMAN A. Regression conformal prediction with nearest neighbours[J]. Journal of Artificial Intelligence Research, 2011, 40: 815-840. doi: 10.1613/jair.3198 [25] LAXHAMMAR R. Conformal anomaly detection: detecting abnormal trajectories in surveillance applications[D]. Sk9vde: University of Sk9vde, 2014. [26] SMITH J, NOURETDINOV I, CRADDOCK R, et al. Anomaly detection of trajectories with kernel density estimation by conformal prediction[C]//Springer. IFIPInternational Conference on Artificial Intelligence Applications and Innovations. Berlin: Springer, 2014: 271-280. [27] LIU Bo, DE SOUZA E N, HILLIARD C, et al. Ship movement anomaly detection using specialized distance measures[C]//IEEE. 18th International Conference on Information Fusion. New York: IEEE, 2015: 1113-1120. [28] SIDIBE A, SHU G. Study of automatic anomalous behaviour detection techniques for maritime vessels[J]. Journal of Navigation, 2017, 70 (4): 847-858. [29] JANSSENS J H M, HIEMSTRA H, POSTMA E O. Creating artificial vessel trajectories with Presto[C]//BNVKI. 22nd Benelux Conference on Artificial Intelligence. Groningen: University of Groningen, 2010: 1-2. [30] LEI Po-ruey. A framework for anomaly detection in maritime trajectory behavior[J]. Knowledge and Information Systems, 2016, 47 (1): 189-214. -

 下载:
下载:







 点击查看大图
点击查看大图
图(12) / 表(2)
计量
- 文章访问数: 803
- HTML全文浏览量: 242
- PDF下载量: 1176
- 被引次数: 0
