

Trajectory tracking control of underactuated ship based on adaptive iterative sliding mode
Article Text (Baidu Translation)
-
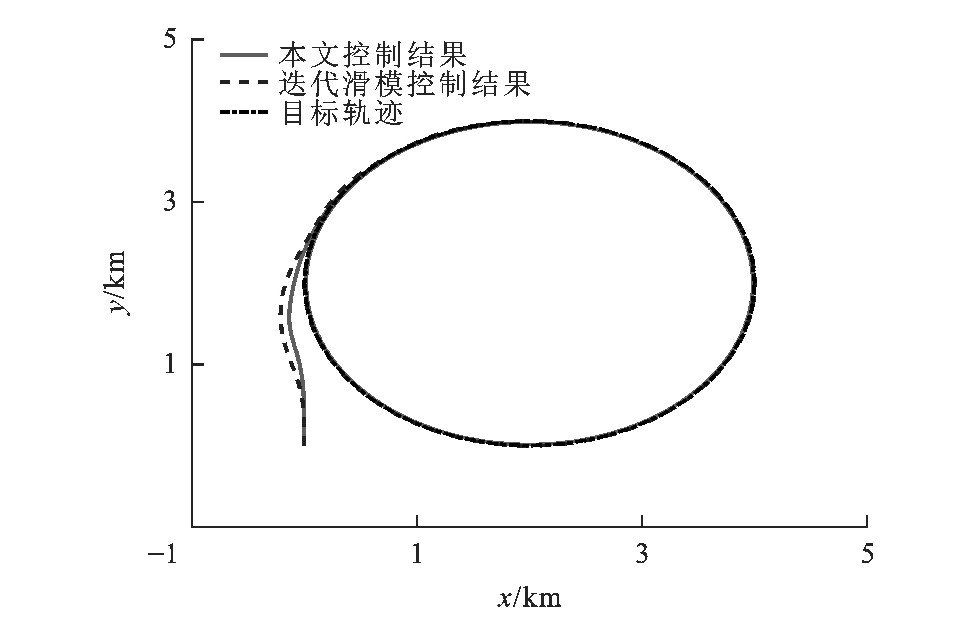
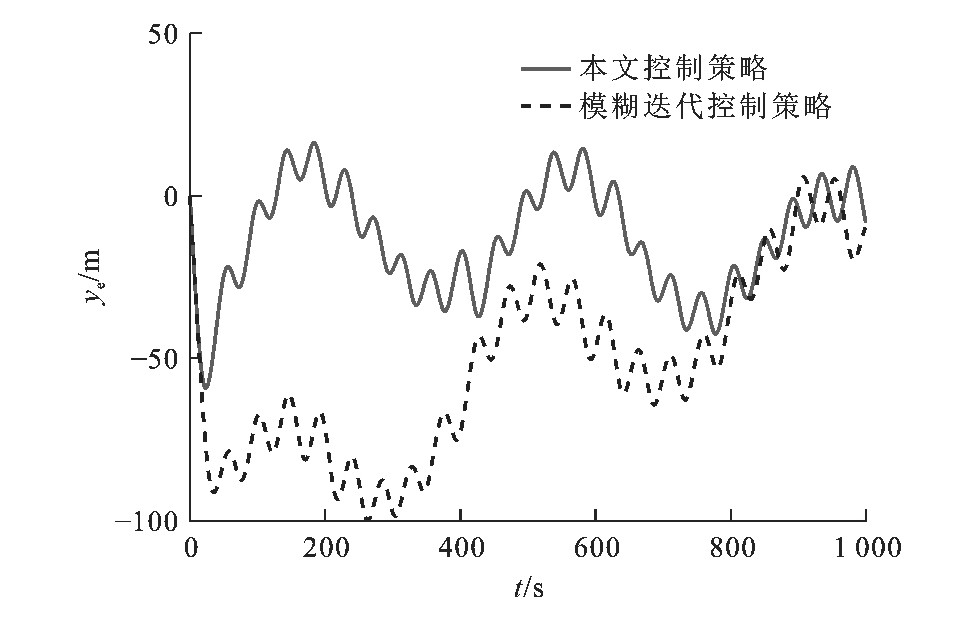
摘要: 针对欠驱动船舶轨迹跟踪控制问题, 考虑系统存在未知参数和外界扰动, 提出了一种带强化学习的神经网络自适应迭代滑模控制方法; 利用轨迹跟踪的横向和纵向误差信息构造非线性迭代滑模面, 分别设计了船舶柴油机转速和舵角的神经网络迭代滑模控制器; 根据船舶柴油机转速和舵角的实时测量值, 计算了反映控制量抖振状态的强化学习信号, 在线优化了神经网络的结构和参数, 以抑制控制量的抖振, 进一步增强控制系统的自适应性; 建立了5446TEU集装箱船舶数学模型, 分别对圆轨迹和正弦轨迹进行了跟踪控制。仿真结果表明: 在风浪扰动下圆轨迹跟踪时, 与迭代滑模控制策略相比, 采用提出的控制策略250s左右能跟踪上目标轨迹, 速度提高约1倍, 最大跟踪偏航距离为250m, 误差减小约30%, 控制舵角在400s后基本平稳, 波动幅值约为2°, 舵角和柴油机转速的抖振变化幅值均减小了50%以上, 柴油机转速控制参数和舵角控制参数分别在38~45和3.3~3.9之间实现了自适应调节; 在正弦轨迹跟踪时, 与模糊迭代滑模控制策略相比, 采用提出的控制策略纵向跟踪平均误差小于20m, 减小了50%以上, 舵角抖振量平均幅值小于10°, 减小了60%以上, 柴油机转速控制参数和舵角控制参数分别在5.7~5.8和0.8~2.5之间实现了自适应调节。Abstract: Aiming at the trajectory tracking control problem of underactuated ship, the unknown parameters and external disturbances of ship system were considered, and a control method with reinforcement learning based on neural network adaptive iterative sliding mode was put forward.The nonlinear iterative sliding mode functions were constructed based on the horizontal and vertical deviations of tracking trajectory, and the neural network iterative sliding mode controllers of diesel engine speed and rudder angle were designed, respectively.According to the real-time measurement values of diesel engine speed and rudder angle, the reinforcement learning signals reflecting the chattering states of control quantities were calculated, and the neural networks' constructions and parameters were optimized online to restrain control the chattering states and enhance the control system's adaptability.The mathematical model of 5446 TEU container ship was established, and the trajectory tracking controls of circular and sinusoidal trajectories werecarried out, respectively.Simulation result shows that when the circular trajectory is tracked under the disturbances of wind and sea wave, the tracking time of target trajectory is about 250 s with the proposed control strategy, and the tracking speed is about 1 time higher than the value with iterative sliding mode control strategy.The maximum tracking yaw distance is 250 m, and the error reduces by about 30%.The control rudder angle is basically stable after 400 s, and its chattering amplitude is about 2°.The chattering amplitudes of rudder angle and diesel engine speed reduce by more than 50%.The control parameters of diesel engine speed and rudder angle are adaptively adjusted between 38-45 and 3.3-3.9, respectively.When the sinusoidal trajectory is tracked, the proposed control strategy is compared with the fuzzy iterative sliding mode control strategy, and the average vertical tracking error is less than 20 mand reduces by more than 50%.The average chattering amplitude of rudder angle is less than 10°and reduces by more than 60%.The control parameters of diesel engine speed and rudder angle are adaptively adjusted between5.7-5.8 and 0.8-2.5, respectively.
-

图 2 神经网络自适应迭代滑模控制结构
Figure 2. Neural network adaptive iterative sliding mode control structure

图 10 圆轨迹的舵角控制参数k25曲线
Figure 10. Ruder angel control parameter k25curve of circular trajectory

图 17 正弦轨迹的柴油机转速控制参数k15曲线
Figure 17. Diesel engine speed control parameter k15curve of sinusoidal trajectory
-
[1] 郭晨, 汪洋, 孙富春, 等. 欠驱动水面船舶运动控制研究综述[J]. 控制与决策, 2009, 24 (3): 321-329. doi: 10.3321/j.issn:1001-0920.2009.03.001GUO Chen, WANG Yang, SUN Fu-chun, et al. Survey for motion control of underactuated surface vessels[J]. Control and Decision, 2009, 24 (3): 321-329. (in Chinese). doi: 10.3321/j.issn:1001-0920.2009.03.001 [2] YANG Yang, DU Jia-lu, LIU Hong-bo, et al. A trajectory tracking robust controller of surface vessels with disturbance uncertainties[J]. IEEE Transactions on Control Systems Technology, 2014, 22 (4): 1511-1518. doi: 10.1109/TCST.2013.2281936 [3] 段海庆, 朱齐丹. 基于反步自适应神经网络的船舶航迹控制[J]. 智能系统学报, 2012, 7 (3): 259-264. doi: 10.3969/j.issn.1673-4785.201205056DUAN Hai-qing, ZHU Qi-dan. Trajectory tracking control of ships based on an adaptive backstepping neural network[J]. CAAI Transactions on Intelligent Systems, 2012, 7 (3): 259-264. (in Chinese). doi: 10.3969/j.issn.1673-4785.201205056 [4] 张伟, 滕延斌, 魏世琳, 等. 欠驱动UUV自适应RBF神经网络反步跟踪控制[J]. 哈尔滨工程大学学报, 2018, 39 (1): 93-99. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201801015.htmZHANG Wei, TENG Yan-bin, WEI Shi-lin, et al. Underactuated UUV tracking control of adaptive RBF neural network and backstepping method[J]. Journal of Harbin Engineering University, 2018, 39 (1): 93-99. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201801015.htm [5] WONDERGEN M, LEFEBER E, PETTERSEN K, et al. Output feedback tracking of ships[J]. IEEE Transactions on Control Systems Technology, 2011, 19 (2): 442-448. doi: 10.1109/TCST.2010.2045654 [6] ASHRAFIUON H, MUSKE K R, MCNINCH L C, et al. Sliding-mode tracking control of surface vessels[J]. IEEE Transactions on Industrial Electronics, 2008, 55 (11): 4004-4012. doi: 10.1109/TIE.2008.2005933 [7] YU Rui-ting, ZHU Qi-dan, XIA Gui-lin, et al. Sliding mode tracking control of an underactuated surface vessel[J]. IET Control Theory and Applications, 2012, 6 (3): 461-466. doi: 10.1049/iet-cta.2011.0176 [8] 贾鹤鸣, 程相勤, 张利军, 等. 基于自适应Backstepping的欠驱动AUV三维航迹跟踪控制[J]. 控制与决策, 2012, 27 (5): 652-657, 664. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201205005.htmJIA He-ming, CHENG Xiang-qin, ZHANG Li-jun, et al. Three-dimensional path tracking control for underactuated AUV based on adaptive backstepping[J]. Control and Decision, 2012, 27 (5): 652-657, 664. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201205005.htm [9] 廖煜雷, 庄佳园, 李晔, 等. 欠驱动无人艇轨迹跟踪的滑模控制方法[J]. 应用科学学报, 2011, 29 (4): 428-434. doi: 10.3969/j.issn.0255-8297.2011.04.016LAO Yu-lei, ZHUANG Jia-yuan, LI Ye, et al. Sliding-mode trajectory tacking control for underactuated autonomous surface vehicle[J]. Journal of Applied Sciences, 2011, 29 (4): 428-434. (in Chinese). doi: 10.3969/j.issn.0255-8297.2011.04.016 [10] 邢道奇, 张良欣. 船舶航迹跟踪的滑模控制[J]. 船舶, 2011, 22 (5): 10-14. https://www.cnki.com.cn/Article/CJFDTOTAL-CBZZ201105005.htmXING Dao-qi, ZHANG Liang-xin. Sliding-model control for trajectory tracking of surface vessels[J]. Ship and Boat, 2011, 22 (5): 10-14. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CBZZ201105005.htm [11] 徐健, 汪慢, 乔磊, 等. 欠驱动UUV三维轨迹跟踪的反步动态滑模控制[J]. 华中科技大学学报: 自然科学版, 2015, 43 (8): 107-113. https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG201508023.htmXU Jian, WANG Man, QIAO Lei, et al. Backstepping dynamical sliding mode controller for three-dimensional trajectory tracking of underactuated UUV[J]. Journal of Huazhong University of Science and Technology: Natural Science Edition, 2015, 43 (8): 107-113. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG201508023.htm [12] 廖煜雷, 万磊, 庄佳园. 欠驱动船路径跟踪的反演自适应动态滑模控制方法[J]. 中南大学学报: 自然科学版, 2012, 43 (7): 2655-2661. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201207029.htmLIAO Yu-lei, WAN Lei, ZHUANG Jia-yuan. Backstepping adaptive dynamical sliding mode control method for path following of underactuated surface vessel[J]. Journal of Central South University: Science and Technology, 2012, 43 (7): 2655-2661. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201207029.htm [13] ELMOKADEM T, ZRIBI M, YOUCEF-TOUMI K. Trajectory tracking sliding mode control of underactuated AUVs[J]. Nonlinear Dynamics, 2016, 84 (2): 1079-1091. [14] HWANG C L, CHIANG C C, YEH Y W. Adaptive fuzzy hierarchical sliding-mode control for the trajectory tracking of uncertain underactuated nonlinear dynamic systems[J]. IEEE Transactions on Fuzzy Systems, 2014, 22 (2): 286-299. [15] RAYGOSA-BARHONA R, PARRA-VEGA V, OLGUIN-DIAZ E, et al. A model-freebackstepping with integral sliding mode control for underactuated ROVs[C]//IEEE. 8th International Conference on Electrical Engineering, Computing Science and Automatic Control. New York: IEEE, 2011: 1-7. [16] LIU Chun-mei, YEH Chih-ping, CHEN Wen. Robust iterative learning control for output tracking via chatteringfree sliding mode control technique[C]//IEEE. 8th IEEE International Conference on Control and Automation. New York: IEEE, 2010: 241-246. [17] ZHAO Guo-liang, ZHAO Can, WANG De-gang. Tensor product model transformation based integral sliding mode control with reinforcement learning strategy[C]//IEEE. Proceedings of the 33rd Chinese Control Conference. New York: IEEE, 2014: 77-82. [18] HE Xiong-xiong, ZHUANG Hua-liang, ZHUANG Duan, et al. Pulse neural network-based adaptive iterative learning control for uncertain robots[J]. Neural Computing and Applications, 2013, 23 (7/8): 1885-1890. [19] HUANG Zheng-yu, EDWARDS R M, LEE K Y. Fuzzyadapted recursive sliding-mode controller design for a nuclear power plant control[J]. IEEE Transactions on Nuclear Science, 2004, 51 (1): 256-266. [20] 贾鹤鸣, 张利军, 程相勤, 等. 基于非线性迭代滑模的欠驱动UUV三维航迹跟踪控制[J]. 自动化学报, 2012, 38 (2): 308-314. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201202019.htmJIA He-ming, ZHANG Li-jun, CHENG Xiang-qin, et al. Three-dimensional path following control for an underactuated UUV based on nonlinear iterative sliding mode[J]. Acta Automatica Sinica, 2012, 38 (2): 308-314. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201202019.htm [21] 卜仁祥, 刘正江, 李铁山. 迭代滑模增量反馈及在船舶航向控制中的应用[J]. 哈尔滨工程大学学报, 2007, 28 (3): 268-272. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200703004.htmBU Ren-xiang, LIU Zheng-jiang, LI Tie-shan. Iterative sliding mode based increment feedback control and its application to ship autopilot[J]. Journal of Harbin Engineering University, 2007, 28 (3): 268-272. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200703004.htm [22] 边信黔, 程相勤, 贾鹤鸣, 等. 基于迭代滑模增量反馈的欠驱动AUV地形跟踪控制[J]. 控制与决策, 2011, 26 (2): 289-292, 296. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201102025.htmBIAN Xin-qian, CHENG Xiang-qin, JIA He-ming, et al. A bottom-following controller for underactuated AUV based on iterative sliding and increment feedback[J]. Control and Decision, 2011, 26 (2): 289-292, 296. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201102025.htm [23] 沈智鹏, 姜仲昊, 王国峰, 等. 风帆助航船舶运动的模糊自适应迭代滑模控制[J]. 哈尔滨工程大学学报, 2016, 37 (5): 634-639. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201605002.htmSHEN Zhi-peng, JIANG Zhong-hao, WANG Guo-feng, et al. Fuzzy-adapted iterative sliding mode control for sail-assisted ship motion[J]. Journal of Harbin Engineering University, 2016, 37 (5): 634-639. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201605002.htm [24] 沈智鹏, 代昌盛. 欠驱动船舶路径跟踪的强化学习迭代滑模控制[J]. 哈尔滨工程大学学报, 2017, 38 (5): 697-704. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201705007.htmSHEN Zhi-peng, DAI Chang-sheng. Iterative sliding mode control based on reinforced learning and used for path tracking of under-actuated ship[J]. Journal of Harbin Engineering University, 2017, 38 (5): 697-704. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201705007.htm [25] SHEN Zhi-peng, GUO Chen, ZHANG Ning. A general fuzzified CMAC based reinforcement learning control for ship steering using recursive least-squares algorithm[J]. Neurocomputing, 2010, 73 (4-6): 700-706. -

 下载:
下载:
















图(18)
计量
- 文章访问数: 957
- HTML全文浏览量: 329
- PDF下载量: 372
- 被引次数: 0
