

Integrated control strategy of articulated heavy vehicle based on timely mode switching under medium/high speed conditions
-
摘要: 在中高速工况下, 建立了重型半挂车五自由度简化模型, 提出了适时模式切换的集成控制策略; 集成控制策略由差动制动和挂车主动转向2个控制系统集成, 针对中高速重型半挂车工况变化, 适时切换集成控制策略的控制模式, 实现中高速重型半挂车各工况精准控制; 采用遗传粒子群算法, 设计了集成控制策略各控制模式对应优化函数, 优化了各控制模式的权重系数, 融合与协调了集成控制策略多个单一控制策略, 以实现各控制模式重型半挂车最优控制; 分析了重型半挂车多个控制策略的仿真结果, 并搭建了硬件在环试验台, 验证了集成控制策略的控制效果。研究结果表明: 在普通工况下, 集成控制策略与挂车主动转向控制策略的控制效果类似, 优于差动制动控制策略的控制效果, 而在极限工况下, 控制能力强于挂车主动转向控制策略和差动制动控制策略; 采用集成控制策略增强了中高速普通工况重型半挂车横摆和折叠稳定性, 牵引车质心侧偏角、挂车横摆角速度和挂车质心侧偏角最大值分别改善了27.46%、53.19%和91.60%, 铰接角最大值改善了29.07%;提升了中高速普通工况重型半挂车路径跟随能力, 挂车后端路径最大偏差改善了95.48%;提高了中高速普通工况的重型半挂车侧倾能力, 牵引车侧倾角、挂车侧倾角、挂车侧向加速度最大值分别改善了11.15%、10.34%和4.08%;避免了极限工况重型半挂车侧翻, 且控制牵引车和挂车侧倾角在25°左右的稳定范围内。Abstract: Under the medium/high speed conditions, the simplified model of articulated heavy vehicle with five degrees of freedom was established, and the integrated control strategy based on timely mode switching was proposed based on the active steering control system of trailer and differential braking control system.According to different medium/high speed conditions, the control modes of integrated control strategy were timely switched to achieve the precision control of articulated heavy vehicle.The optimizing functions corresponding to the control modes were designed to optimize the weight coefficients of control modes by the genetic particle swarm optimization algorithm.According to the optimal weight coefficients, the multiple single controlstrategies in integrated control strategy were fused and coordinated to achieve the optimal control of articulated heavy vehicle under various modes.The simulation results of multiple control strategies of articulated heavy vehicles were analyzed, and the hardware-in-the-loop test bench was constructed to verify the control effect of integrated control strategy.Research result indicates that the control effect of integrated control strategy is similar to the effect of active steering control strategy of trailer and better than the effect of differential braking control strategy under the normal working condition, and better than the effects of active steering control strategy of trailer and differential braking control strategy under the limit working condition.The maximum slip angle of tractor, the maximum yaw velocity of trailer and the maximum slip angle of trailer are improved by 27.46%, 53.19% and 91.60%, respectively, and the maximum hitch angle is improved by 29.07%, so the integrated control strategy can improve the yaw and jackknife stability of articulated heavy vehicle under the medium/high speed normal conditions.The maximum path deviation of trailer rear is improved by 95.48%, so the integrated control strategy can enormously promote the path following ability of articulated heavy vehicle under the medium/high speed normal conditions.The maximum roll angle of tractor, the maximum roll angle of trailer and the maximum lateral acceleration of trailer are improved by 11.15%, 10.34%and 4.08%, respectively, so the integrated control strategy can improve the roll stability of articulated heavy vehicle under the medium/high speed normal conditions.The integrated control strategy can avoid vehicle rollover under the limit working condition and control the roll angles of tractor and trailer in the stable range of about 25°.
-

图 6 低附单移线工况牵引车质心侧偏角仿真结果对比
Figure 6. Simulation result comparison of slip angle for center of mass of tractor under low-adhesion single-lane change condition

图 7 低附单移线工况挂车横摆角速度仿真结果对比
Figure 7. Simulation result comparison of yaw velocity of trailer under low-adhesion single-lane change condition

图 8 低附单移线工况挂车质心侧偏角仿真结果对比
Figure 8. Simulation result comparison of slip angle for center of mass of trailer under low-adhesion single-lane change condition

图 9 低附单移线工况铰接角仿真结果对比
Figure 9. Simulation result comparison of hitch angle under low-adhesion single-lane change condition

图 10 低附单移线工况牵引车侧倾角仿真结果对比
Figure 10. Simulation result comparison of roll angle of tractor under low-adhesion single-lane change condition

图 11 低附单移线工况挂车侧倾角仿真结果对比
Figure 11. Simulation result comparison of roll angle of trailer under low-adhesion single-lane change condition

图 12 低附单移线工况挂车侧向加速度仿真结果对比
Figure 12. Simulation result comparison of lateral acceleration of trailer under low-adhesion single-lane change condition

图 13 高附双移线工况牵引车侧倾角仿真结果对比
Figure 13. Simulation result comparison of roll angle of tractor under high-adhesion double-lane change condition

图 14 高附双移线工况挂车侧倾角仿真结果对比
Figure 14. Simulation result comparison of roll angle of trailer under high-adhesion double-lane change condition

图 15 高附双移线工况牵引车侧向加速度仿真结果对比
Figure 15. Simulation result comparison of lateral acceleration of tractor under high-adhesion double-lane change condition

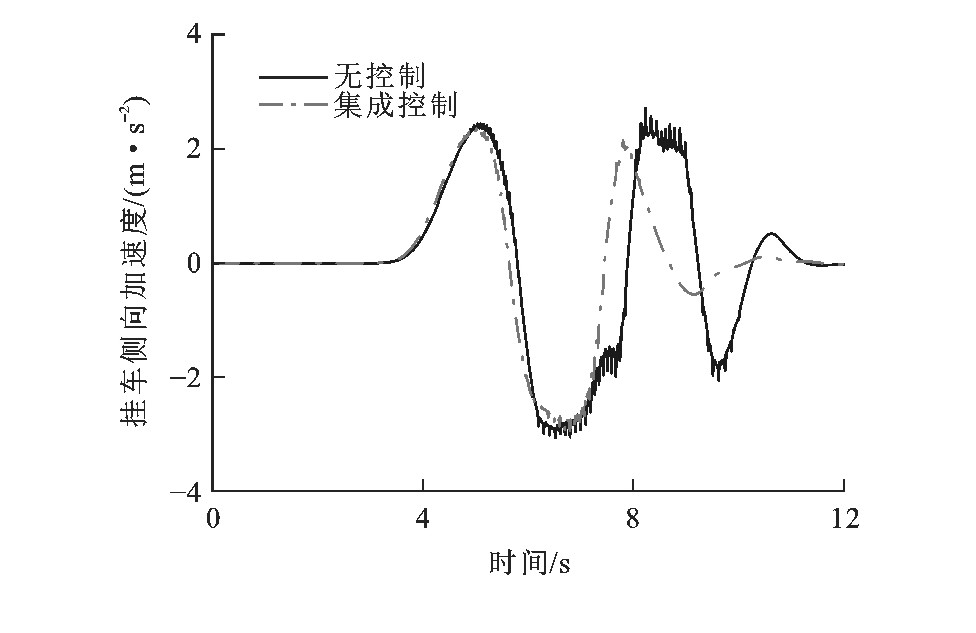
图 16 高附双移线工况挂车侧向加速度仿真结果对比
Figure 16. Simulation result comparison of lateral acceleration of trailer under high-adhesion double-lane change condition

图 17 高附双移线工况挂车横摆角速度仿真结果对比
Figure 17. Simulation result comparison of yaw velocity of trailer under high-adhesion double-lane change condition

图 18 高附双移线工况挂车质心侧偏角仿真结果对比
Figure 18. Simulation result comparison of slip angle for center of mass of trailer under high-adhesion double-lane change condition

图 20 低附单移线工况制动压力
Figure 20. Brake pressures under low-adhesion single-lane change condition

图 21 低附单移线工况主动转向角试验结果对比
Figure 21. Experiment result comparison of active steering angle under low-adhesion single-lane change condition

图 22 低附单移线工况牵引车质心侧偏角试验结果对比
Figure 22. Experiment result comparison of slip angle of tractor under low-adhesion single-lane change condition

图 23 低附单移线工况挂车横摆角速度试验结果对比
Figure 23. Experiment result comparison of yaw velocity of trailer under low-adhesion single-lane change condition

图 24 低附单移线工况挂车质心侧偏角试验结果对比
Figure 24. Experiment result comparison of slip angle of center of mass for trailer under low-adhesion single-lane change condition

图 25 低附单移线工况侧向位移试验结果对比
Figure 25. Experiment result comparison of lateral displacement under low-adhesion single-lane change condition

图 26 低附单移线工况铰接角试验结果对比
Figure 26. Experiment result comparison of hitch angle under low-adhesion single-lane change condition

图 27 低附单移线工况牵引车侧倾角试验结果对比
Figure 27. Experiment result comparison of roll angle of tractor under low-adhesion single-lane change condition

图 28 低附单移线工况挂车侧倾角试验结果对比
Figure 28. Experiment result comparison of roll angle of trailer under low-adhesion single-lane change condition

图 29 低附单移线工况挂车侧向加速度试验结果对比
Figure 29. Experiment result comparison of lateral acceleration of trailer under low-adhesion single-lane change condition

图 30 高附双移线工况牵引车侧倾角试验结果对比
Figure 30. Experiment result comparison of roll angle of tractor under high-adhesion double-lane change condition

图 31 高附双移线工况挂车侧倾角试验结果对比
Figure 31. Experiment result comparison of roll angle of trailer under high-adhesion double-lane change condition

图 32 高附双移线工况切换标志
Figure 32. Switching flags under high-adhesion double-lane change condition

图 33 高附双移线工况主动转向角度
Figure 33. Active steering angles under high-adhesion double-lane change condition

图 34 高附双移线工况牵引车前轴制动压力
Figure 34. Brake pressures of front axle for tractor under high-adhesion double-lane change condition

图 35 高附双移线工况牵引车后轴制动压力
Figure 35. Brake pressures of rear axle for tractor under high-adhesion double-lane change condition

图 36 高附双移线工况挂车制动压力
Figure 36. Brake pressures of trailer under high-adhesion double-lane change condition
表 1 低附单移线工况仿真结果
Table 1. Simulation result under low-adhesion single-lane change condition

 下载: 导出CSV
下载: 导出CSV
-
[1] 宗长富, 聂枝根张振. 厢式半挂车简化模型参数辨识研究[J]. 中国公路学报, 2014, 27 (4): 112-120. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201404018.htmZONG Chang-fu, NIE Zhi-gen, ZHANG Zhen. Parameters Identification for simplified model of container semi-trailer[J]. China Journal of Highway and Transport, 2014, 27 (4): 112-120. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201404018.htm [2] OBEROI D. Enhancing roll stability and directional performance of articulated heavy vehicles based on anti-roll control and design optimization[D]. Oshawa: University of Ontario Institute of Technology, 2011. [3] TRIGELL A S, ROTHHMEL M, PAUWELUSSEN J, et al. Advanced vehicle dynamics of heavy trucks with the perspective of road safety[J]. Vehicle System Dynamics, 2017, 55 (10): 1572-1617. doi: 10.1080/00423114.2017.1319964 [4] KIM Y C, YUN K H, MIN K D. Automatic guidance control of articulated all-wheel-steered vehicle[J]. Vehicle System Dynamics, 2014, 52 (4): 456-474. doi: 10.1080/00423114.2013.831458 [5] DAL POGGETTO V F, SERPA A L. Vehicle rollover avoidance by application of gain-scheduled LQR controllers using state observers[J]. Vehicle System Dynamics, 2016, 54 (2): 191-209. doi: 10.1080/00423114.2015.1125005 [6] KHARRAZI S, LIDBERG M, FREDRIKSSON J. Robustness analysis of a steering-based control strategy for improved lateral performance of a truck-dolly-semitrailer[J]. International Journal of Heavy Vehicle Systems, 2015, 22 (1): 1-20. doi: 10.1504/IJHVS.2015.070414 [7] OREH S H T, KAZEMI R, AZADI S. A new method for off-tracking eliminating in a tractor semi-trailer[J]. International Journal of Heavy Vehicle Systems, 2016, 23 (2): 107-130. doi: 10.1504/IJHVS.2016.075490 [8] WANG Qiu-shi, HE Yu-ping. A study on single lane-change maneuvers for determining rearward amplification of multitrailer articulated heavy vehicles with active trailer steering systems[J]. Vehicle System Dynamics, 2016, 54 (1): 102-123. doi: 10.1080/00423114.2015.1123280 [9] JUJNOVICH B A, CEBON D. Path-following steering control for articulated vehicles[J]. Journal of Dynamic Systems, Measurement and Control, 2013, 135 (3): 1-15. [10] CHENG C, CEBON D. Improving roll stability of articulated heavy vehicles using active semi-trailer steering[J]. Vehicle System Dynamics, 2008, 46 (S): 373-388. [11] VU V T, SENAME O, DUGARD L, et al. Enhancing roll stability of heavy vehicle by LQR active anti-roll bar control using electronic servo-valve hydraulic actuators[J]. Vehicle System Dynamics, 2017, 55 (9): 1405-1429. doi: 10.1080/00423114.2017.1317822 [12] 聂枝根, 宗长富, 杨秀建, 等. 模式切换的中高速重型半挂车挂车主动转向控制策略[J]. 重庆大学学报, 2017, 40 (8): 78-89. https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201708010.htmNIE Zhi-gen, ZONG Chang-fu, YANG Xiu-jian, et al. The active trailer strategy for articulated heavy vehicles based on modes switching in medium/high speed conditions[J]. Journal of Chongqing University, 2017, 40 (8): 78-89. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201708010.htm [13] MORRISON G, CEBON D. Combined emergency braking and turning of articulated heavy vehicles[J]. Vehicle System Dynamics, 2017, 55 (5): 725-749. doi: 10.1080/00423114.2016.1278077 [14] GOODARZI A, GHAJAR M, BAGHESTANI A, et al. Integrated yaw and roll moments control for articulated vehicles[C]//SAE International. 2009 Commercial Vehicle Engineering Congress and Exhibition. Warrendale: SAE International, 2009: 1-12. [15] MOUSAVINEJAD E, HAN Qing-long, YANG Fu-wen, et al. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control[J]. Vehicle System Dynamics, 2017, 55 (2): 268-294. doi: 10.1080/00423114.2016.1256489 [16] YAKUB F, MORI Y. Heavy vehicle stability and rollover prevention via switching model predictive control[J]. International Journal of Innovative Computing, Information and Control, 2015, 11 (5): 1751-1764. [17] ISLAM M. Rollover parallel design optimization of multi-trailer articulated heavy vehicles with active safety systems[D]. Oshawa: University of Ontario Institute of Technology, 2013. [18] 聂枝根. 基于后轴主动转向与差动制动集成的重型半挂车控制策略研究[D]. 长春: 吉林大学, 2014.NIE Zhi-gen. Research on integrated control strategy combined differential braking with active rear axle steering for articulated vehicle[D]. Changchun: Jilin University, 2014. (in Chinese). [19] CHENG Cai-zhen, ROEBUCK R, ODHAMS A, et al. Highspeed optimal steering of a tractor-semitrailer[J]. Vehicle System Dynamics, 2011, 49 (4): 561-593. doi: 10.1080/00423111003615212 [20] 聂枝根, 宗长富. 重型半挂车简化模型参数辨识研究[J]. 汽车工程, 2015, 37 (6): 622-630. doi: 10.3969/j.issn.1000-680X.2015.06.003NIE Zhi-gen, ZONG Chang-fu. A study on the parameters identification of simplified models for articulated heavy vehicles[J]. Automotive Engineering, 2015, 37 (6): 622-630. (in Chinese). doi: 10.3969/j.issn.1000-680X.2015.06.003 [21] LI Xin, SHAMSI P. Model predictive current control of switched reluctance motors with inductance auto-calibration[J]. IEEE Transactions on Industrial Electronics, 2016, 63 (6): 3934-3940. doi: 10.1109/TIE.2015.2497301 [22] SHARP R S, VALTETSIOTIS V. Optimal preview car steering control[J]. Vehicle System Dynamics, 2001, 35 (S): 101-117. [23] ISLAM M, DING Xue-jun, HE Yu-ping. A closed-loop dynamic simulation-based design method for articulated heavy vehicles with active trailer steering systems[J]. Vehicle System Dynamics, 2012, 50 (5): 675-697. doi: 10.1080/00423114.2011.622904 [24] HE Yu-ping, ISLAM M. An automated design method for active trailer steering systems of articulated heavy vehicles[J]. Journal of Mechanical Design, 2012, 134 (4): 1-15. [25] YOON J, CHO W, KANG Ju-yong, et al. Design and evaluation of a unified chassis control system for rollover prevention and vehicle stability improvement on a virtual test track[J]. Control Engineering Practice, 2010, 18 (6): 585-597. [26] NAL K, GVENC L, LABS M. Real-time hardware-inthe-loop simulation of time to rollover warning for heavy commercial vehicles[J]. International Journal of Heavy Vehicle Systems, 2014, 21 (2): . -




































 点击查看大图
点击查看大图

计量
- 文章访问数: 574
- HTML全文浏览量: 210
- PDF下载量: 307
- 被引次数: 0
