

Design of variable structure controller for active steering vehicle
Article Text (Baidu Translation)
-
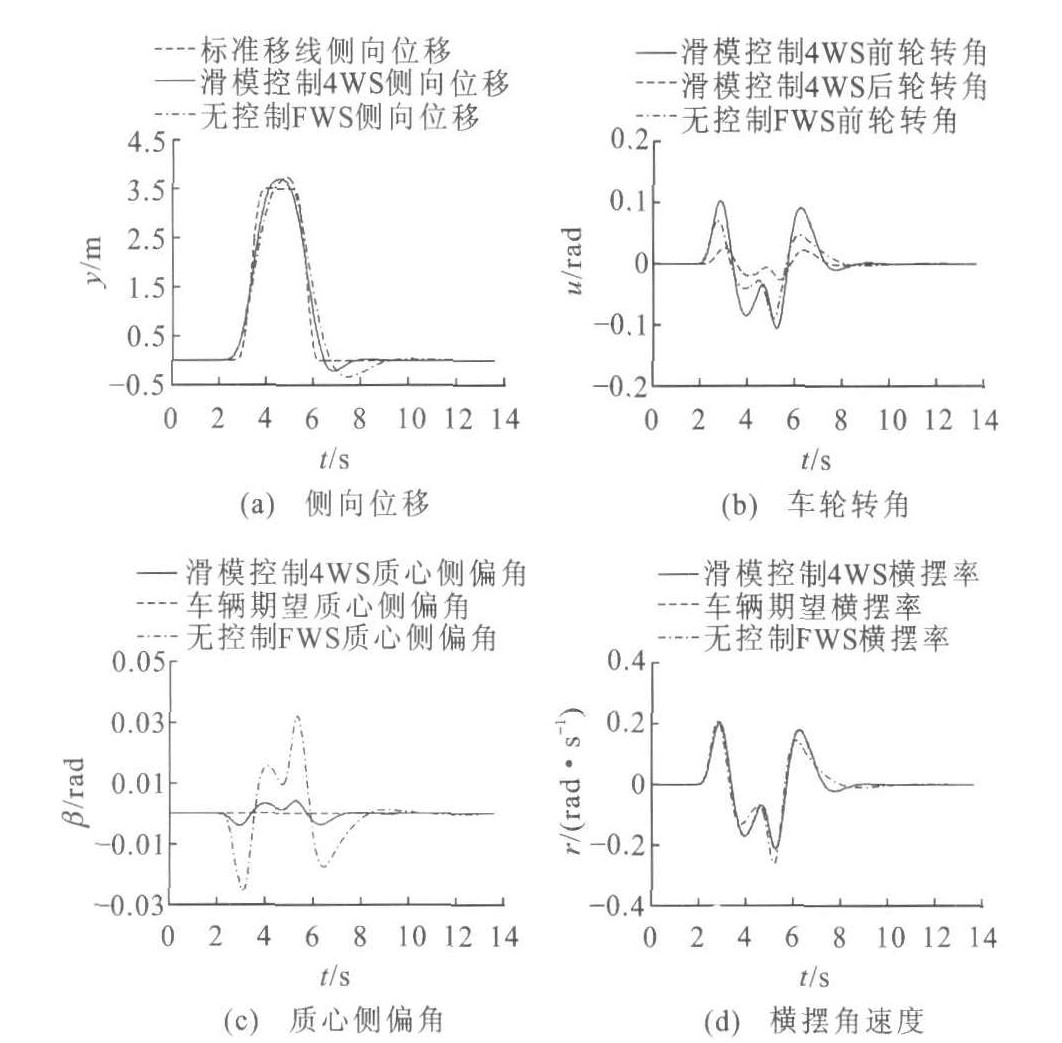
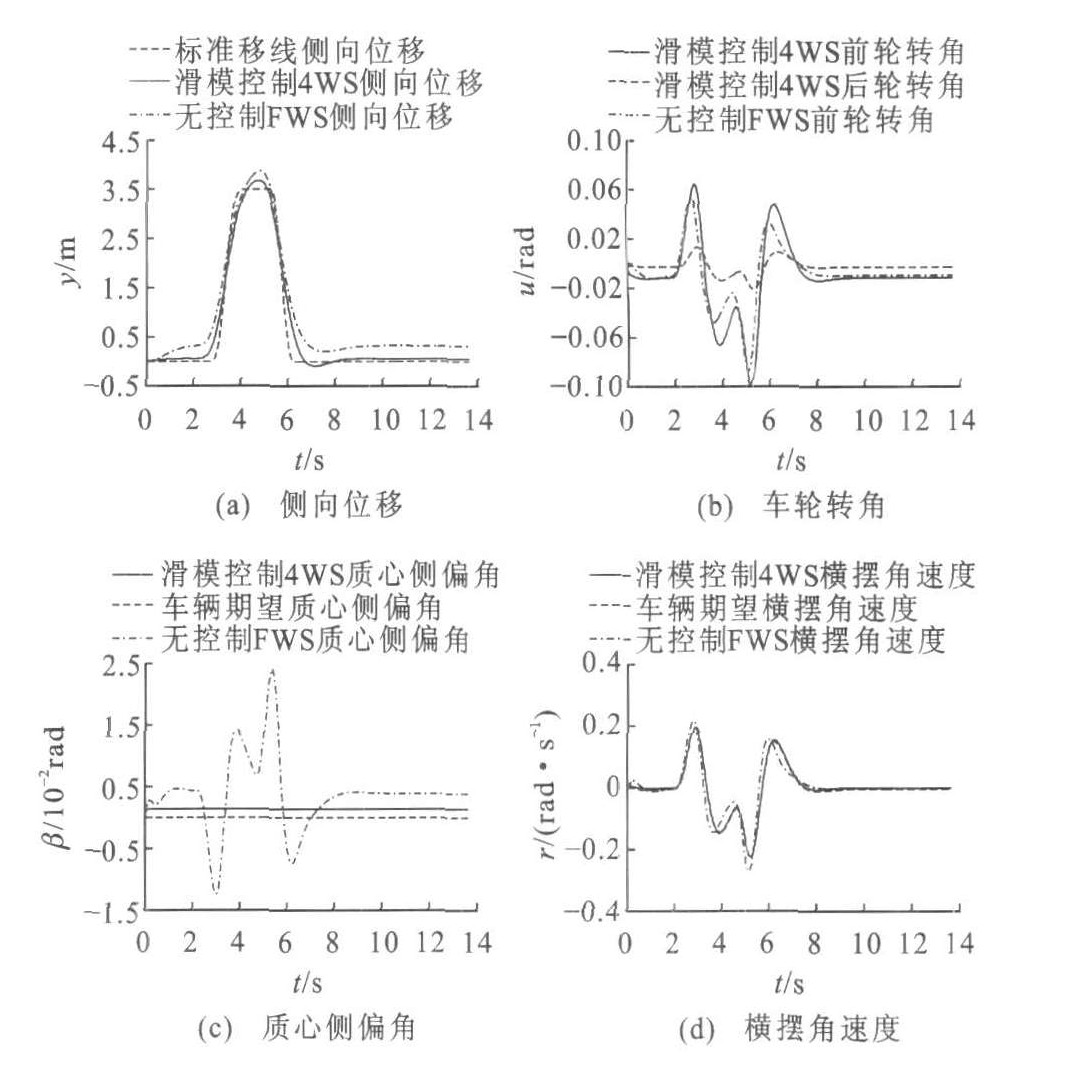
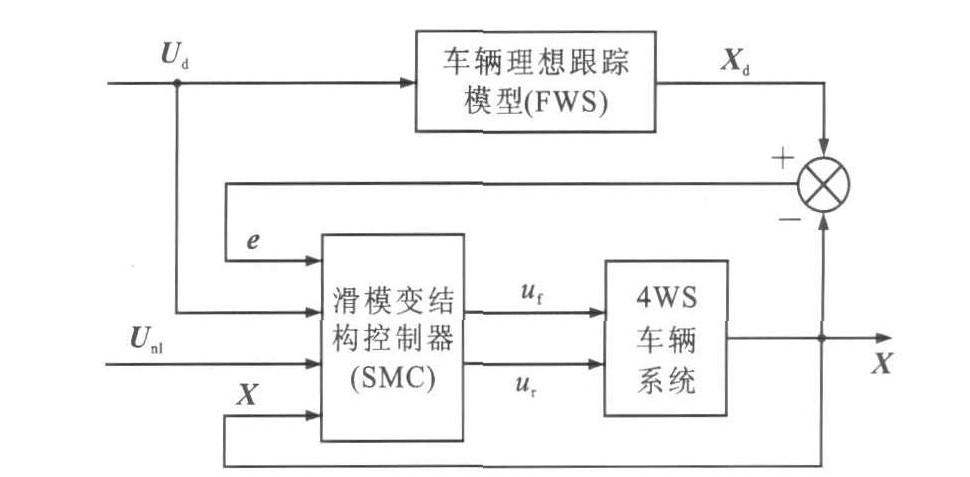
摘要: 针对基于线控转向技术的四轮主动转向汽车, 利用滑模变结构控制策略, 以提高车辆在紧急避障和危险工况下运行的安全性。将实际车辆的前、后轮侧偏刚度及外部干扰视为有界的不确定性参数, 利用确定性线性车辆模型作为理想跟踪目标, 进行车辆主动转向的变结构控制器设计。人-车-路闭环系统仿真结果表明: 当轮胎侧偏刚度摄动或有外部侧风干扰时, 变结构控制的四轮主动转向汽车实现了转向零质心侧偏角和跟踪期望横摆率的控制目标, 其双移线仿真最终路径偏差分别为0m和0.05m, 被控车辆系统表现出了良好的路径跟踪性和在不确定影响下的鲁棒性, 车辆的操纵稳定性与主动安全性得到了提高。Abstract: In order to improve the safety of vehicle during emergency obstacle avoidance and critical state, sliding mode variable structure control strategy was studied for active four-wheel steering vehicle based on steer-by-wire technology. A variable structure controller was designed for active steering vehicle, the cornering stiffnesses of the front and rear tires and the outer disturbance of an actual vehicle were treated as uncertain parameters, but their variances were in limited ranges, and a certain linearity vehicle model with certain parameters was taken as an ideal following goal. Based on driver-vehicle-road closed loop system, simulation result indicates that four-wheel steering vehicle with variable structure controller can maintain near zero sideslip angle and desired yaw rate, and its path errors are only 0 m and 0.05 m after changing line. Obviously, the controlled vehicle system behaves favorable performance for following path and robustness for uncertainty, its handleability and active safety are improved.
-

图 2 侧偏刚度摄动移线仿真
Figure 2. Lane change simulation result with perturbation of cornering stiffness

图 3 侧向风干扰移线仿真
Figure 3. Fig. 3 Lane change simulation result with disturbance of side wind
表 1 车辆参数
Table 1. Vehicle parameters
m/kg Iz/(kg·m2) a/m b/m kf0/(N·rad-1) kr0/(N·rad-1) 1 359.8 1 992.5 1.062 8 1.485 2 52 480 88 416  下载: 导出CSV
下载: 导出CSV
-
[1] 屈求真, 刘延柱, 张建武. 四轮转向汽车自适应模型跟踪控制研究[J]. 汽车工程, 2002, 20(2): 73-76. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200002000.htmQU Qiu-zhen, LI U Yan-zhu, ZHANG Jian-wu. Adaptive model following control of four-wheel steering vehicle[J]. Automotive Engineering, 2002, 20(2): 73-76. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200002000.htm [2] 李普, 陈南, 孙庆鸿. 4轮转向车辆主动鲁棒抗侧倾操纵研究[J]. 汽车工程, 2004, 22(5): 560-563. doi: 10.3321/j.issn:1000-680X.2004.05.013LI Pu, CHEN Nan, SUN Qing-hong. Active robust roll control for four wheel steering vehicle[J]. Automotive Engineering, 2004, 22(5): 560-563. (in Chinese) doi: 10.3321/j.issn:1000-680X.2004.05.013 [3] HIRAOKO T, NISHI HARA O, KUMAMOTO H. Model-following sliding mode control for active four-wheel steering vehicle[J]. Trans. of JSAE, 2004, 35(4): 163-169. [4] 杨盐生. 不匹配不确定系统的变结构鲁棒控制及应用[J]. 交通运输工程学报, 2001, 1(2): 103-107. doi: 10.3321/j.issn:1671-1637.2001.02.024YANG Yan-sheng. Variable structure robust control algorithmfor uncertain system with the absence of matching assumptions[J]. Journal of Traffic and Transportation Engineering, 2001, 1(2): 103-107. (in Chinese) doi: 10.3321/j.issn:1671-1637.2001.02.024 [5] AGA M, KUSUNOKI H, SATOH Y, et al. Design of2-degree-of-freedom control system for active front-and-rear-wheel steering[J]. SAE Transactions, 1990, 99(6): 1529-1536. [6] DIRK E S, JONE M S. Effect of model complexity on the performance of automated vehicle steering controllers: model development, validation and comparison[J]. Vehicle System Dynamics, 1995, 24(2): 163-181. doi: 10.1080/00423119508969086 [7] WILL A B, ZAK S H. Modelling and control of an automated vehicle[J]. Vehicle System Dynamics, 1997, 27(3): 131-155. doi: 10.1080/00423119708969326 [8] 高振海, 管欣, 郭孔辉. 预瞄跟随理论和驾驶员模型在汽车智能驾驶研究中的应用[J]. 交通运输工程学报, 2002, 2(2): 63-66. http://transport.chd.edu.cn/article/id/200202016GAO Zhen-hai, GUAN Xin, GUO Kong-hui. Application of previewfollower theory and driver model in the research of vehicle intelligent handling[J]. Journal of Traffic and Trans-portation Engineering, 2002, 2(2): 63-66. (in Chinese) http://transport.chd.edu.cn/article/id/200202016 [9] 郭孔辉, 朱宏巍. 汽车转向的力输入控制与角输入控制及其对驾驶员-汽车闭环系统的影响[J]. 吉林工业大学学报, 1997, 27(1): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY701.000.htmGUO Kong-hui, ZHU Hong-wei. Force control, position control and their effects on driver-vehicle closed-loop system[J]. Journal of Jilin University of Technology, 1997, 27(1): 1-7. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY701.000.htm [10] 陈燕, 刘晶郁, 陈少华, 等. 横摆角速度反馈对车辆操纵稳定性的影响[J]. 长安大学学报: 自然科学版, 2006, 26(6): 99-101. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200606022.htmCHEN Yan, LI UJing-yu, CHENShao-hua, et al. Yawrate feedback for vehicle stability with EPS[J]. Journal of Chang an University: Natural Science Edition, 2006, 26(6): 99-101. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200606022.htm [11] 郑玲, 邓兆祥, 李以农. 汽车半主动悬架的模型参考自适应控制[J]. 中国公路学报, 2005, 18(2): 99-102. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL20050200J.htmZHENG Ling, DENG Zhao-xiang, LI Yi-nong. Model reference adaptive control of semi-active suspensions[J]. China Journal of Highway and Transport, 2005, 18(2): 99-101. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL20050200J.htm -

 点击查看大图
点击查看大图
图(3) / 表(1)
计量
- 文章访问数: 581
- HTML全文浏览量: 239
- PDF下载量: 649
- 被引次数: 0
