

Influence of velocity change on handling and stability of vehicle
-
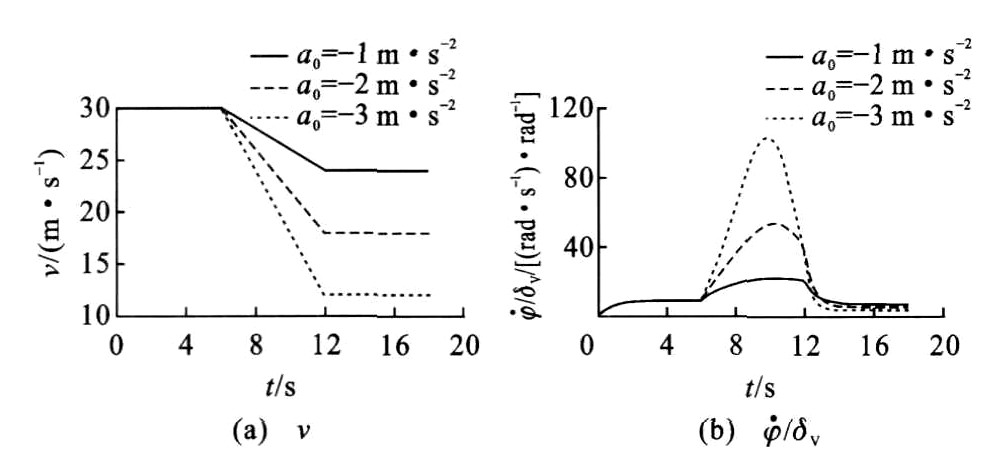
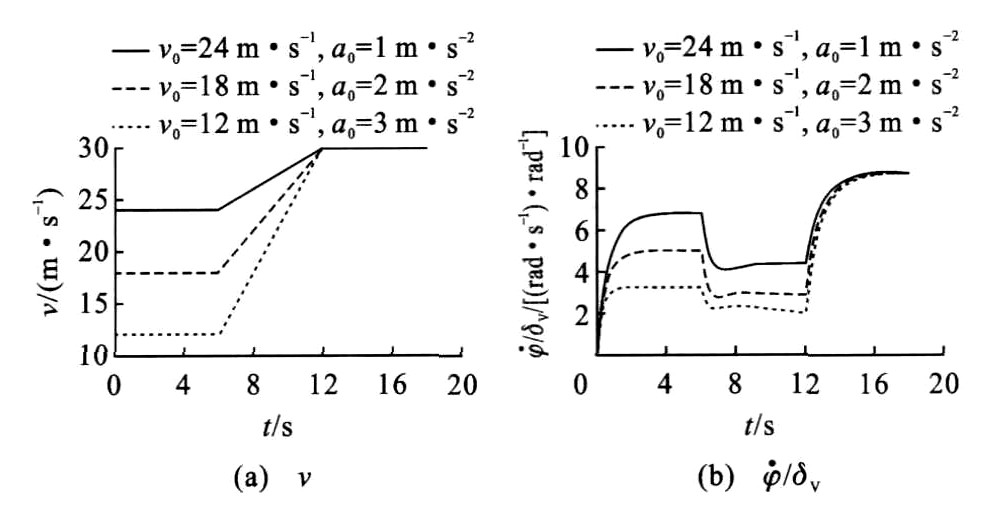
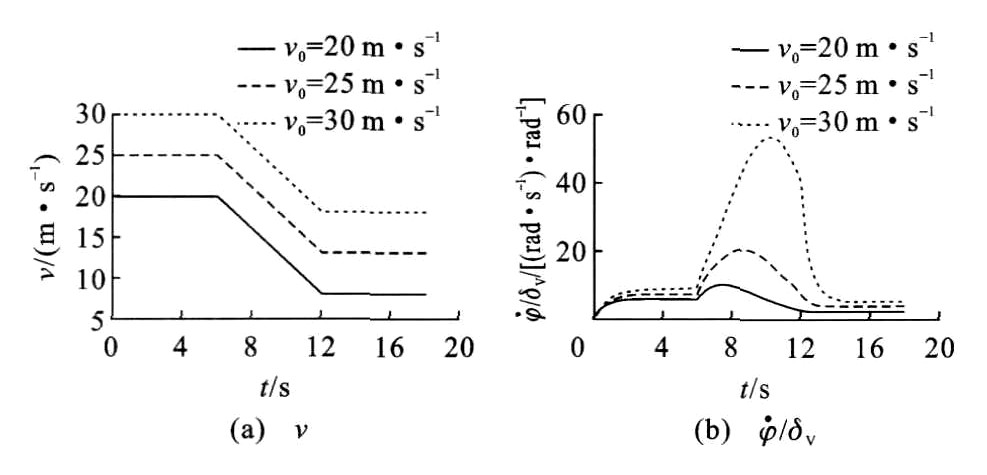
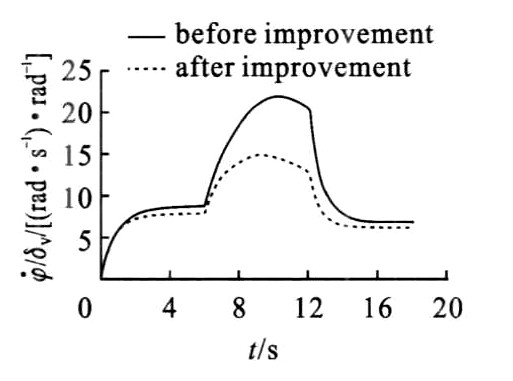
摘要: 为了降低车速变化对车辆操纵稳定性的影响, 建立了考虑车速变化的动态车辆转向运动模型, 分析了描述模型的微分方程组所有系数都是随车速变化而时变的特性, 通过变参数动态仿真, 定量研究了车速变化对车辆操纵稳定性的影响。研究结果表明: 减速时正的纵向车辆惯性力使后轴负荷向前轴转移, 导致前轴侧偏刚度变大, 后轴侧偏刚度变小, 进而使车辆的横摆角速度增益增大, 即车辆操纵稳定性变差; 初始车速越高, 减速度越大, 车辆横摆角速度增益增大越快; 加速时负的纵向车辆惯性力使前轴负荷向后轴转移, 导致前轴侧偏刚度变小, 后轴侧偏刚度变大, 进而使车辆的横摆角速度增益减小。可见, 减小车辆减速度、降低车身质心高度及增大轴距是弱化减速导致车辆操纵稳定性急剧变差的有效方法。Abstract: To improve the handling and stability of vehicle while velocity changing, a dynamic steering model was established, and all of the coefficients of differential equations describing the model changed with velocity change. The influence of velocity change on the handling and stability was quantitatively researched by varying parameter dynamic simulations. Study result shows that when vehicle decelerates, part load is transferred from rear axle to front axle caused by the positive longitudinal inertial force of vehicle, the corner stiffness of front axle increases, the corner stiffness of rear axle decreases, and vehicle steering gain increases, so the handling and stability of vehicle deteriorate. Vehicle steering gain increases more rapidly and obviously with higher early velocity and/or bigger deceleration. When vehicle accelerates, part load is transferred from front axle to rear axle caused by the negative longitudinal inertial force of vehicle, the corner stiffness of front axle decreases, the corner stiffness of rear axle increases, and vehicle steering gain decreases. Obviously, avoiding big deceleration, lowing vehicle mass center and enlarging wheelbase as far as possible during vehicle design and manufacture are effective methods to lessen the degree that the handling and stability become worse rapidly in slowing vehicle down.
-

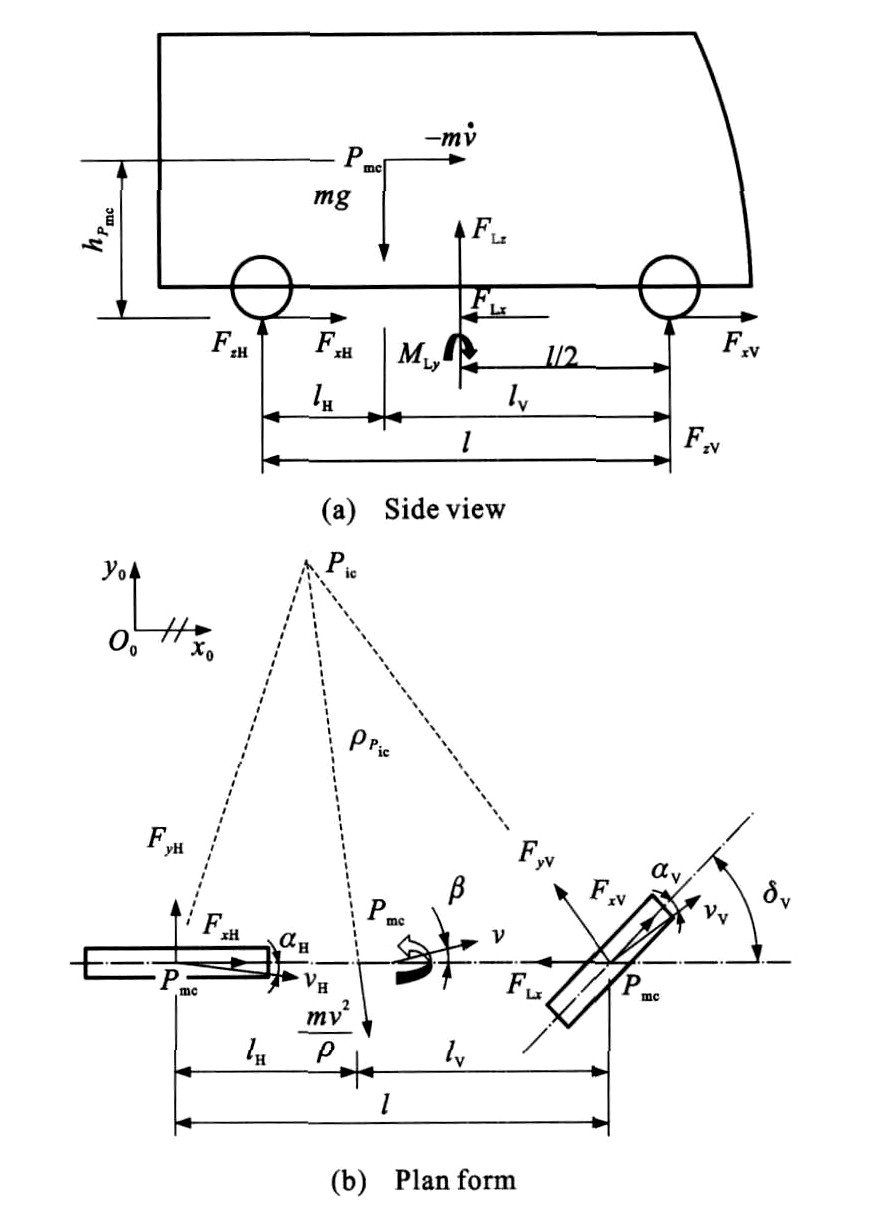
图 1 考虑车速变化的车辆转向运动原理
Figure 1. Steering principle of vehicle considering velocity change
表 1 Structure parameters of vehicle
Table 1. Structure parameters of vehicle
Parameters Values Parameters Values m/kg 10 240 ηV 2 Imz/(kg·m2) 31 288 ηH 4 l/m 3.8 cα1 -4.612 6 lV/m 2.679 3 cα2 -0.584 5 Ax/m2 6.99 FzXenn/N 18 620 hPmc/m 1.3 CLz -0.019 CD 0.534 CMLy -0.044  下载: 导出CSV
下载: 导出CSV
表 2 Maximums under running condition 1
Table 2. Maximums under running condition 1
Running conditions [(rad·s-1)·rad-1] v0/(m·s-1) a0/(m·s-2) 30 -1 21.841 8 21.841 8 30 -2 53.447 3 26.723 6 30 -3 103.868 2 34.622 7
下载: 导出CSV
表 3 Values under running condition 3
Table 3. Values under running condition 3
Running conditions [(rad·s-1)·rad-1] [(rad·s-1)·rad-1] v0/(m·s-1) a0/(m·s-2) 30 -2 8.644 5 53.447 3 6.182 8 25 -2 7.064 2 20.235 6 2.864 5 20 -2 5.526 5 9.788 0 1.771 1
下载: 导出CSV
-
[1] LI Xian-sheng, GAO Yan-ling, WANG Yun-peng. A study on i mproving control stability of commercial vehicle[J]. Automotive Engineering, 2000, 22(3): 197-200, 191. (in Chinese) [2] CHEN Long, YUAN Chuan-yi, JI ANG Hao-bin, et al. Integrated adaptive fuzzy control of vehicle active suspension and electric power steering system [ J ]. Automotive Engineering, 2007, 29(1): 8-12, 26. (in Chinese) [3] GUAN Xi-qiang, QU Qiu-zhen, ZHANG Jian-wu, et al. Four-wheel-steering system based on the variable structure model following control [ J ]. Chinese Journal of Mechanical Engineering, 2002, 38(3): 54-58. (in Chinese) doi: 10.3901/JME.2002.03.054 [4] LIU Xi-dong, MA Jian, GUO Rong-qing. Sensitivity analysis method of vehicle steering system under braking condition[J]. Journal of Traffic and Transportation Engineering, 2008, 8(3): 20-23. (in Chinese) [5] LI Kai-jun, DENG Kun, XIA Qun-sheng, et al. Loadtransfer of the tractor-semitrailer combination when braking and its effect on braking performance [ J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(11): 17-21. (in Chinese) [6] CAGLAR BASLAMISLI S, EMRE K SE I, ANLAS G. Gain-scheduledintegrated active steering and differential con- trol for vehicle handling i mprovement[J]. Vehicle System Dynamics, 2009, 47(1): 99-119. doi: 10.1080/00423110801927100 [7] CHEN Long, YUAN Chao-chun, JI ANG Hao-bin. Astudy on the handling stability of vehicles with EPS based onμ synthesis robust control[J]. Automotive Engineering, 2008, 30(8): 705-708, 712. (in Chinese) [8] GUO Kong-hui, KONG Fan-sen, ZONG Chang-fu. Application of genetic algorithms to evaluation of motor vehicle manuverable and structure opti mum[J]. Chinese Journal of Mechanical Engineering, 2000, 36(10): 34-36. (in Chinese) doi: 10.3901/JME.2000.10.034 [9] ISHIO J, ICHIKAWA H, KANO Y, et al. Handling performance for active rear-wheel steering vehicle robust control[J]. Vehicle System Dynamics, 2008, 46(S): 549-560. [10] KI MJ. Analysis of handling performance based on si mplified lateral vehicle dynamics[J]. International Journal of Automotive Technology, 2008, 9(6): 687-693. doi: 10.1007/s12239-008-0081-y [11] HE Li-juan, LI N Yi. Nonlinear si mulation on vehicle handling stability andfront wheel shi mmy[J]. Automotive Engineering, 2007, 29(5): 389-392. (in Chinese) [12] PFEFFER P E, HARRER M, JOHNSTON D N. Interaction of vehicle and steering system regarding on-centre handling[J]. Vehicle System Dynamics, 2008, 46(5): 413-428. doi: 10.1080/00423110701416519 [13] OKC, UOGLU M, FRIEDMAN K, MI HORA D, et al. Consideration of vehicle handling and stability with i mproved roof strength[J]. International Journal of Crashworthiness, 2007, 12(5): 541-547. doi: 10.1080/13588260701483938 [14] MAVROS G. On the objective assessment and quantification of the transient-handling response of a vehicle[J]. Vehicle System Dynamics, 2007, 45(2): 93-112. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 253
- HTML全文浏览量: 77
- PDF下载量: 282
- 被引次数: 0
