

Fuzzy control of lateral semi-active suspension system for high-speed train
-
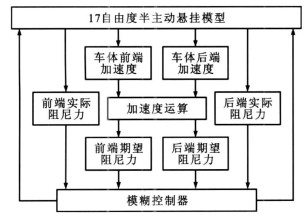
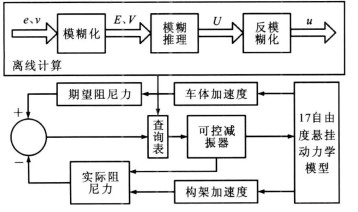
摘要: 为了抑制由高速车体摇头引起的车体横向振动, 构造了高速列车横向半主动悬挂系统模糊控制结构, 采用模糊控制策略, 以减振器的实际阻尼力和车体、构架的横向振动加速度为反馈输入, 对车体前后横向悬挂系统的可调减振器进行双闭环反馈独立控制。以美国六级轨道谱为输入, 在列车运行速度为270km.h-1时, 结合表征列车悬挂系统横向振动特征的17自由度动力学模型, 对半主动悬挂机车和被动悬挂机车的横向振动、摇头振动进行计算。计算结果表明: 采用半主动悬挂的高速车体平稳性改善了12.54%, 摇头振动幅值减少了35.00%, 横向振动幅值减少了48.45%, 在车体固有频率(1~6Hz)附近, 车体横向振动、摇头振动抑制达到50%。可见, 该控制结构和控制策略能够明显抑制车体横向振动。Abstract: In order to reduce the lateral vibration of high-speed train caused by shaking movement, a fuzzy control structure of lateral semi-active suspension system was designed. Fuzzy control strategy was adopted to independently control the adjustable shock absorber of suspension system based on double-loop feedback inputs, which were the actual damping force of the shock absorber and the lateral vibration accelerations of the frame and the body for train. With the 17 DOFs vehicle dynamics model that can reflect the lateral vibration features of suspension system, in the input condition of the sixth track spectrum of America and 270 km·h-1, the lateral vibrations and shaking vibrations of semi-active suspension system and passive suspension system were computed and compared. Computation result shows that stationary indicator improves by 12.54%, shaking vibration reduces by 35.00%, lateral vibration reduces by 48.45%, and the shaking and lateral vibrations of the body are isolated by 50% in the vicinity of natural frequency(1~6 Hz) for the body. The result indicates that the control strategy and control structure can strikingly isolate the lateral vibration of the body. 7 tabs, 6 figs, 9 refs.
-

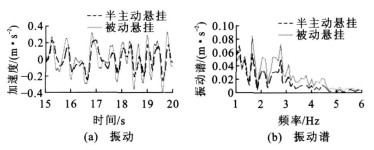
图 4 车体前端横向振动和振动谱比较
Figure 4. Comparison of lateral vibrations and vibration spectrums in front of car body

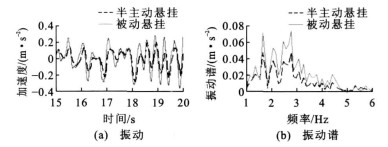
图 5 车体后端横向振动和振动谱比较
Figure 5. Comparison of lateral vibrations and vibration spectrums at back end of car body

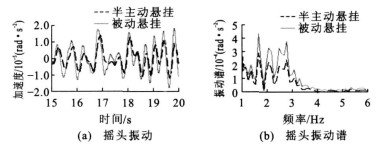
图 6 车体摇头振动和摇头振动谱比较
Figure 6. Comparison of shaking vibrations and vibration spectrums for car body
表 1 误差赋值
Table 1. Assignments of error
μE(x) x -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 E NB 1.0 0.8 0.7 0.4 0.1 0 0 0 0 0 0 0 0 NM 0.2 0.7 1.0 0.7 0.2 0 0 0 0 0 0 0 0 NS 0 0 0.1 0.5 1.0 0.8 0.3 0 0 0 0 0 0 NO 0 0 0 0 0.1 0.6 1.0 0 0 0 0 0 0 PO 0 0 0 0 0 0 1.0 0.6 0.1 0 0 0 0 PS 0 0 0 0 0 0 0.3 0.8 1.0 0.5 0.1 0 0 PM 0 0 0 0 0 0 0 0 0.2 0.7 1.0 0.7 0.2 PB 0 0 0 0 0 0 0 0 0.1 0.4 0.7 0.8 1.0  下载: 导出CSV
下载: 导出CSV
表 2 误差变化率赋值
Table 2. Assignments of error rate
$\mu_{\dot{E}}(y)$ y -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 $\dot{E}$ NB 1.0 0.8 0.7 0.4 0.1 0 0 0 0 0 0 0 0 NM 0.2 0.7 1.0 0.7 0.2 0 0 0 0 0 0 0 0 NS 0 0 0.2 0.7 1.0 0.9 0 0 0 0 0 0 0 ZO 0 0 0 0 0 0 0.5 1.0 0.5 0 0 0 0 PS 0 0 0 0 0 0 0 0.9 1.0 0.7 0.1 0 0 PM 0 0 0 0 0 0 0 0 0.2 0.7 1.0 0.7 0.2 PB 0 0 0 0 0 0 0 0 0.1 0.4 0.7 0.8 1.0
下载: 导出CSV
表 3 控制电流赋值
Table 3. Assignments of control current
μU(z) z 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 U NB 1.00 0.75 0.50 0.25 0 0 0 0 0 0 0 0 0 0 0 NM 0 0.25 0.75 1.00 0.75 0.50 0.25 0 0 0 0 0 0 0 0 NS 0 0 0 0 0 0.33 0.66 1.00 0.66 0.33 0 0 0 0 0 ZO 0 0 0 0 0 0 0 0 0 0.50 1.00 0 0 0 0 PS 0 0 0 0 0 0 0 0 0 0 0 1.00 0.50 0 0 PM 0 0 0 0 0 0 0 0 0 0 0 0 0.50 1.00 0.20 PB 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1.00
下载: 导出CSV
表 4 半主动悬挂模糊控制规则
Table 4. Fuzzy control rules of semi-active suspension
U V NB NM NS ZO PS PB PB E NB NB NB NB NB NM NS NS NM NB NB NB NB NM NS NS NS NM NM NM NM ZO PS PS NO NM NM NS ZO PS PM PM PO NM NM NS ZO PS PM PM PS NS NS ZO PM PM PM PM PM PS PS PM PB PB PB PB PB PS PS PM PB PB PB PB
下载: 导出CSV
表 5 半主动悬挂模糊控制查询表
Table 5. Quering table of fuzzy control for semi-active suspension
z y -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 x -6 0 1 0 1 1 1 3 4 4 5 5 6 7 -5 2 2 2 2 2 2 3 4 5 5 6 7 7 -4 3 3 3 3 3 3 4 5 6 6 7 8 8 -3 3 3 3 3 3 4 5 5 6 7 7 8 9 -2 3 4 4 4 5 5 6 6 7 7 8 9 9 -1 4 5 5 5 6 6 7 7 7 9 9 9 10 0 5 5 5 6 7 7 7 7 8 11 11 12 12 1 6 6 6 6 7 8 8 8 8 12 12 12 13 2 6 7 7 7 8 9 10 13 13 12 13 13 13 3 7 7 7 8 8 9 10 13 13 13 13 13 13 4 8 8 9 9 9 10 11 13 13 13 13 13 13 5 10 10 10 10 12 12 13 13 14 14 14 14 14 6 11 11 12 12 13 13 13 14 14 14 14 14 14
下载: 导出CSV
表 6 悬挂系统部分参数
Table 6. Some parameters of suspension system
Mc=40 000 kg, Jcx=89 396 kg·m2, Jcz=2485 756 kg·m2 Mt=2 280 kg, Jtx=2 650 kg·m2, Jtz=3 000 kg·m2 Mw=1 920 kg, 2lc=18 m, Ksy=208 kN·m-1, Kpy=7.5 MN·m-1
下载: 导出CSV
表 7 平稳性指标和振动幅值比较
Table 7. Comparison of ride indexes and vibration amplitudes
悬挂类型 平稳性指标 横向振动幅值/(m·s-2) 摇头振动幅值/(rad·s-2) 车体前 车体后 车体前 车体后 被动悬挂 2.093 3 2.085 5 0.40 0.38 0.002 0 半主动悬挂 1.830 8 1.803 9 0.22 0.19 0.001 3 改善情况/% 12.54 13.50 48.45 50.00 35.00
下载: 导出CSV
-
[1] 刘增华, 李芾. 傅茂海, 等. 铁道车辆空气弹簧系统最优控制策略及方法研究[J]. 铁道学报, 2006, 28(1): 26-30. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200601005.htmLIU Zeng-hua, LI Fu, FU Mao-hai, et al. Study on the optimal control tactics and method about rail vehicle airspring systems[ J]. Journal of the China Railway Society, 2006, 28(1): 26-30. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200601005.htm [2] 丁问司, 卜继玲. 铁道车辆横向开关半主动悬架系统研究[J]. 机械工程学报, 2004, 40(9): 161-164, 170. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200409035.htmDING Wen-si, BU Ji-ling. Research on lateral on-off semi-active suspensions of railway vehicles[J]. Chinese Journal of Mechanical Engineering, 2004, 40(9): 161-164, 170. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200409035.htm [3] BRAATZ R, MORARIT M. Robust control for a noncollocated spring-mass system[ J]. Journal of Guidance, Control and Dynamics, 1992, 15(5): 1103-1110. doi: 10.2514/3.20956 [4] 陈春俊, 王开云. 高速列车横向半主动悬挂系统建模研究及分析[J]. 振动与冲击, 2006, 25(4): 151-154, 169. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200604040.htmCHEN Chun-jun, WANG Kai-yun. Study on modeling of lateral semi-active suspension system of high-speed train[ J]. Journal of Vibration and Shock, 2006, 25(4): 151-154, 169. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200604040.htm [5] PALKOVICS L, VENHOVENS P J. Investigation on stability and possible chaotic motions in the controlled wheel suspension system[J]. Vehicle System Dynamics, 1992, 21(5): 269-296. [6] 诸静. 模糊控制理论与系统原理[ M]. 北京: 机械工业出版社, 2005.ZHU Jing. Fuzzy Control System Theory and Principle[ M]. Beijing: China Machine Press, 2005. (in Chinese) [7] 陈春俊. 高速列车横向主动、半主动悬挂控制研究[ D]. 成都: 西南交通大学, 2006.CHEN Chun-jun. Research on active and semi-active control of lateral suspension system for high-speed train[D]. Chengdu: Southwest Jiaotong University, 2006. (in Chinese) [8] 高国生, 杨绍普, 陈恩利, 等. 高速机车悬架系统磁流变阻尼器试验建模与半主动控制[J]. 机械工程学报, 2004, 40(10): 87-91. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200410017.htmGAO Guo-sheng, YANG Shao-pu, CHEN En-li, et al. Experimental modeling and its application for semi-active control of high-speed train suspension system[ J]. Chinese Journal of Mechanical Engineering, 2004, 40(10): 87-91. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200410017.htm [9] TB/T2360—93, 机车动力学性能试验鉴定方法及评定标准[S].TB/T2360—93, methods and criterias of locomotive dynamics performance tests[S]. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 544
- HTML全文浏览量: 221
- PDF下载量: 286
- 被引次数: 0
