

-
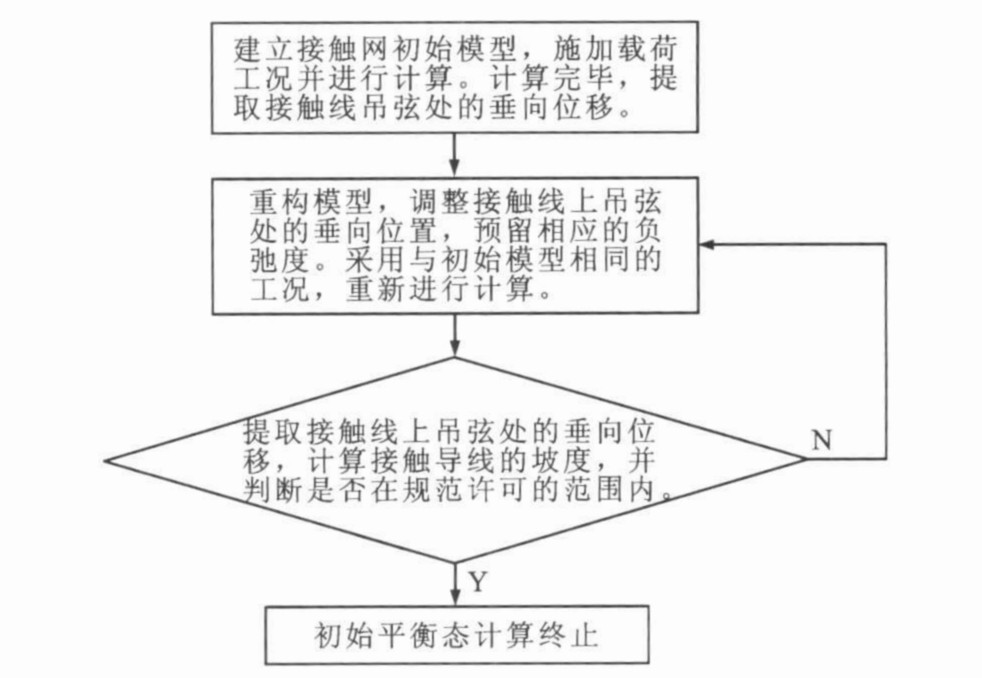
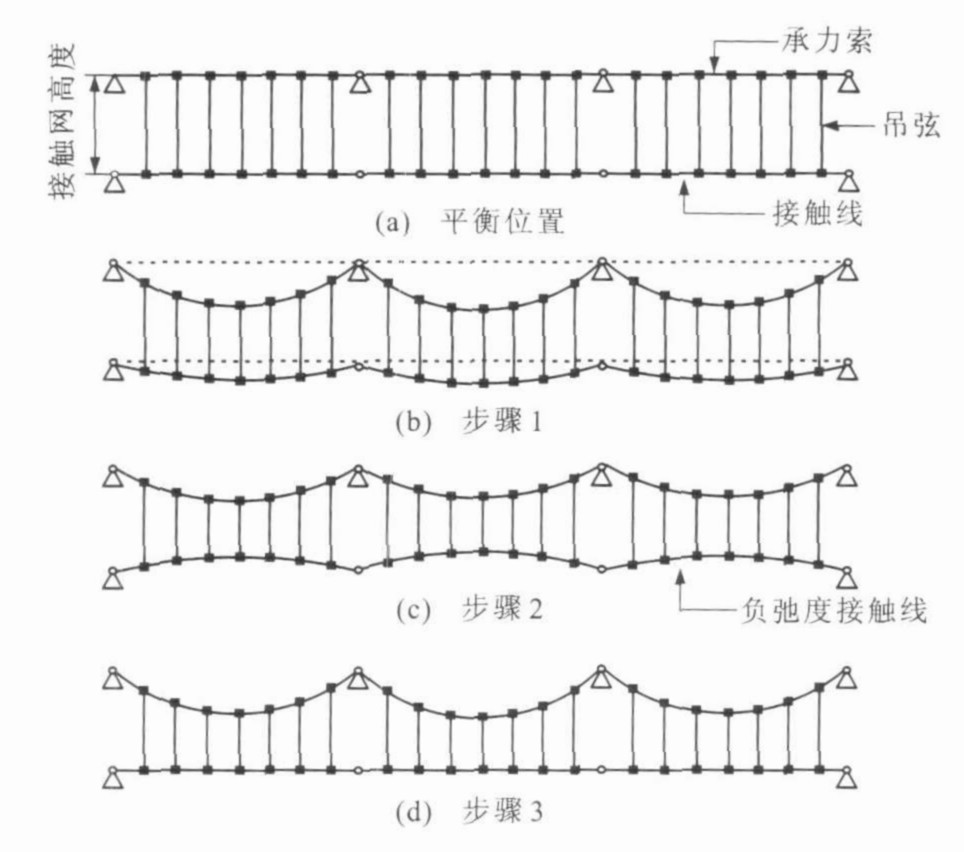
摘要: 基于整体求解的思想, 通过接触网在张力和自重作用下的垂向位移, 对接触网模型进行重构, 并给接触线预留一定的负弛度, 以保证经过几次负弛度计算后, 接触线到达初始平衡位置时保持水平, 由此得到满足初始平衡条件的吊弦长度, 确定了接触网在初始平衡位置的几何参数和应力分布, 同时将负弛度法和传统方法进行对比研究。对比结果表明: 用负弛度法得到的吊弦长度比传统方法略长, 吊弦长度最大相对偏差为0.75%;用负弛度法计算的接触网单元应力随单元几何位置的不同而变化, 而传统方法得到的单元应力是恒定的, 单元应力最大相对偏差为0.55%。可见, 两种方法得到的吊弦长度和应力分布有很好的一致性, 负弛度法更有利于后续的弓网系统动力学计算, 而且对于多跨的复杂接触网模型, 负弛度法也同样有效。Abstract: The model configuration of simple stitched catenary was studied by negative sag method.The initial calculation under the action of tension and gravity was performed to obtain the vertical displacement of the catenary, and the initial model was restructured.Based on the obtained vertical displacement, the negative sag was reserved in advance to ensure the horizon of contact wire under the initial equilibrium state after a series of the calculations of negative sags.Thus, the dropper length, being satisfied with the initial equilibrium equation, was obtained.Furthermore, the model configuration of the catenary was determined, such as the geometry property and stress distribution.Negative sag method was compared with conventional method.It is pointed that the obtained dropper length by negative sag method is slightly longer than that by conventional method, and the maximum relative deviation of the dropper length is 0.75%.For negative sag method, there is small change of the element stress with the various locations of the element.However, for conventional method, the element stress is constant, and the maximum relative deviation of the element stress is 0.55%.The results show excellent agreement with the comparison data.Moreover, it is indicated that with negative sag method, it is easier to implement the subsequent analysis of pantograph-catenary system, and the method is also effective for complicated catenary including multiple spans.
-
Key words:
- catenary /
- initial equilibrium /
- negative sag method /
- dropper length /
- stress
-
表 1 接触网参数
Table 1. Parameters of catenary
参数 材料名称 弹性模量/GPa 密度/(kg·m-1) 张力/kN 截面面积/mm2 承力索 GLJC120/35 81.7 0.602 17 153 接触线 RiS120 130 1.07 13 120 跨数 3 接触网总长度/m 195 接触网高度/m 1.5 支撑弹簧刚度/(N·m-1) 2.5×107 定位杆(锚段处)等效质量/kg 0.530(1.873) 单跨吊弦数目 7 单跨吊弦间距/m 4.0 9.5 9.5 9.5 9.5 9.5 9.5 单跨吊弦刚度/(N·m-1) 1.21×106 1.37×106 1.52×106 1.57×106 1.52×106 1.37×106 1.21×106 单跨吊弦质量/kg 0.151 0.093 0.084 0.081 0.084 0.093 0.151  下载: 导出CSV
下载: 导出CSV
表 2 吊弦长度计算结果
Table 2. Results of dropper lengthes
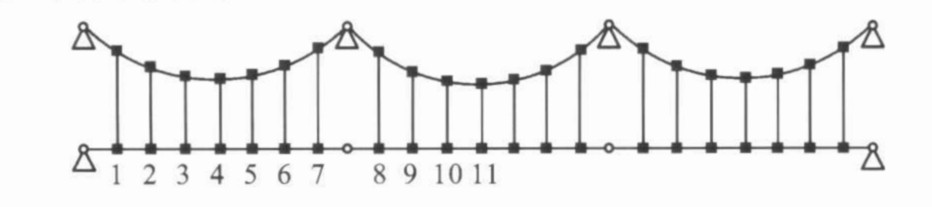
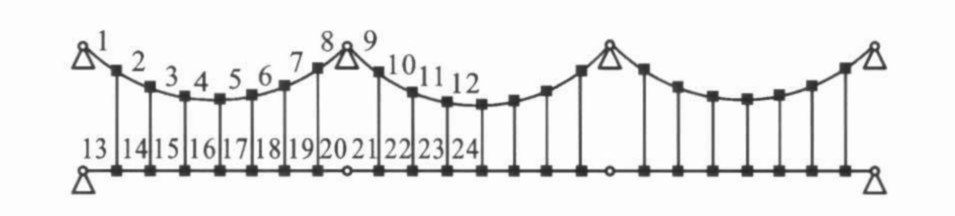
m 吊弦 分模法 负弛度法 绝对偏差 吊弦 分模法 负弛度法 绝对偏差 1 1.380 4 1.382 5 0.002 1 7 1.375 5 1.378 9 0.003 4 2 1.159 7 1.164 8 0.005 1 8 1.375 2 1.378 0 0.002 9 3 1.027 0 1.033 9 0.006 9 9 1.155 3 1.159 7 0.004 4 4 0.982 3 0.989 8 0.007 5 10 1.023 5 1.028 7 0.005 2 5 1.025 4 1.032 6 0.007 2 11 0.979 5 0.985 0 0.005 5 6 1.156 5 1.162 3 0.005 8 注: 吊弦的编号见图 5。
下载: 导出CSV
表 3 单元应力计算结果
Table 3. Results of element stresses
MPa 承力索 分模法 负弛度法 接触线 分模法 负弛度法 1 111.11 111.16 13 108.33 108.33 2 111.11 111.13 14 108.33 108.34 3 111.11 111.10 15 108.33 108.36 4 111.11 111.08 16 108.33 108.38 5 111.11 111.07 17 108.33 108.39 6 111.11 111.07 18 108.33 108.40 7 111.11 111.08 19 108.33 108.40 8 111.11 111.10 20 108.33 108.41 9 111.11 110.57 21 108.33 108.41 10 111.11 110.54 22 108.33 108.41 11 111.11 110.52 23 108.33 108.42 12 111.11 110.50 24 108.33 108.42 注: 单元的编号见图 6。
下载: 导出CSV
表 4 受电弓参数
Table 4. Parameters of pantograph
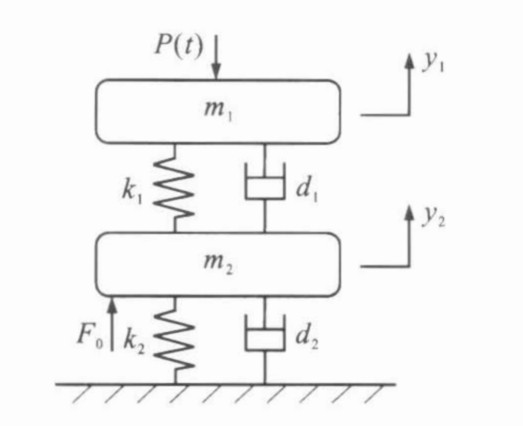
m1/kg 6 d2/(N·s·m-1) 50 d1/(N·s·m-1) 50 k2/(N·m-1) 0 k1/(N·m-1) 6 000 F0/N 90 m2/kg 20
下载: 导出CSV
-
[1] WU T X, BRENNAN MJ. Dynamic stiffness of a rail wayoverhead wire system and its effect on pantograph-catenarysystem dynamics[J]. Journal of Sound and Vibration, 1999, 219(3): 483-502. doi: 10.1006/jsvi.1998.1869 [2] ARNOLD M, SI MEONB. Pantograph and catenary dynamics: abenchmark problem and its numerical solution[J]. AppliedNumerical Mathematics, 2000, 34(4): 345-362. [3] LOPEZ-GARCI A O, CAMICERO A, TORRES V. Compu-tation of the initial equilibriumof rail way overheads based onthe catenary equation[J]. Engineering Structures, 2006, 28(10): 1387-1394. doi: 10.1016/j.engstruct.2006.01.007 [4] METRIKI NE A V, BOSCH A L. Dynamic response of atwo-level catenary to a movingload[J]. Journal of Sound andVibration, 2006, 292(3/4/5): 676-693. [5] 梅桂明, 张卫华. 受电弓/接触网系统动力学模型及特性[J]. 交通运输工程学报, 2002, 2(1): 20-25. doi: 10.3321/j.issn:1671-1637.2002.01.004MEI Gui-ming, ZHANG Wei-hua. Dynamics model andbehavior of pantograph/catenary system[J]. Journal ofTraffic and Transportation Engineering, 2002, 2(1): 20-25. (in Chinese) doi: 10.3321/j.issn:1671-1637.2002.01.004 [6] HABER R B, ABELJ F. Initial equilibriumsolution methodsfor cable reinforced membranes: part(Ⅰ)-formulations[J]. Computer Methods in Applied Mechanics and Engineering, 1982, 30(3): 263-284. doi: 10.1016/0045-7825(82)90080-9 [7] 吴天行. 接触网的有限元计算与分析[J]. 铁道学报, 1996, 18(3): 44-49. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB603.006.htmWU Tian-xing. Analysis and calculation of catenary by FEM[J]. Journal of the China Rail way Society, 1996, 18(3): 44-49. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB603.006.htm [8] WU T X, BRENNAN MJ. Basic analytical study of pantograph-catenary system dynamics[J]. Vehicle System Dynamics, 1998, 30(6): 443-456. doi: 10.1080/00423119808969460 [9] SHAN Q, ZHAI W M. A macroelement methodfor catenarymode analysis[J]. Computers and Structures, 1998, 69(6): 767-772. [10] BRUNO D, LEONARDI A. Nonlinear structural models incableways transport systems[J]. Si mulation Practice andTheory, 1999, 7(3): 207-218. -

 点击查看大图
点击查看大图
图(9) / 表(4)
计量
- 文章访问数: 729
- HTML全文浏览量: 148
- PDF下载量: 396
- 被引次数: 0
