

-
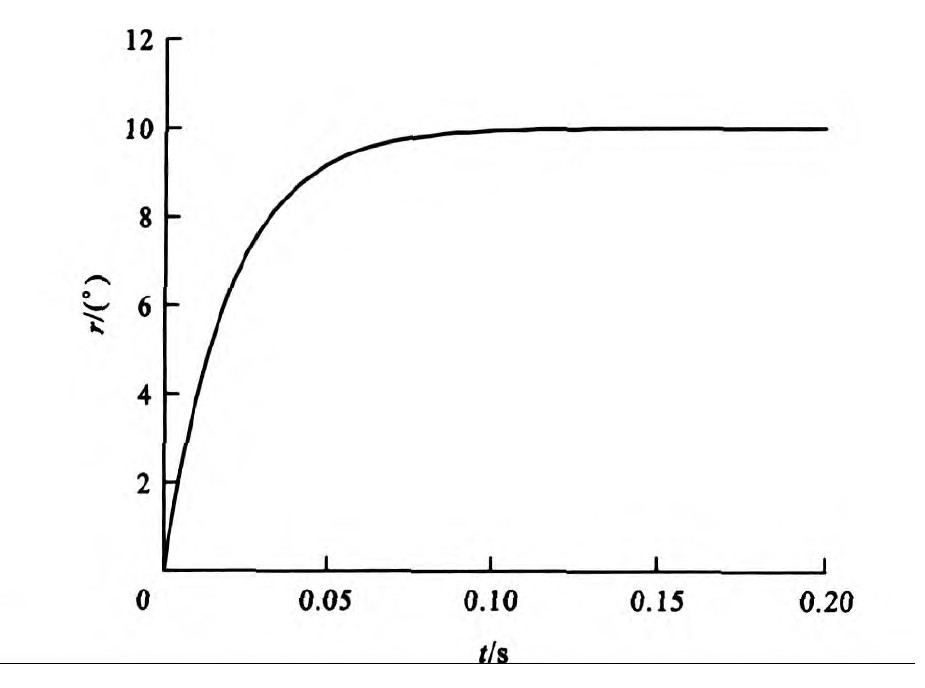
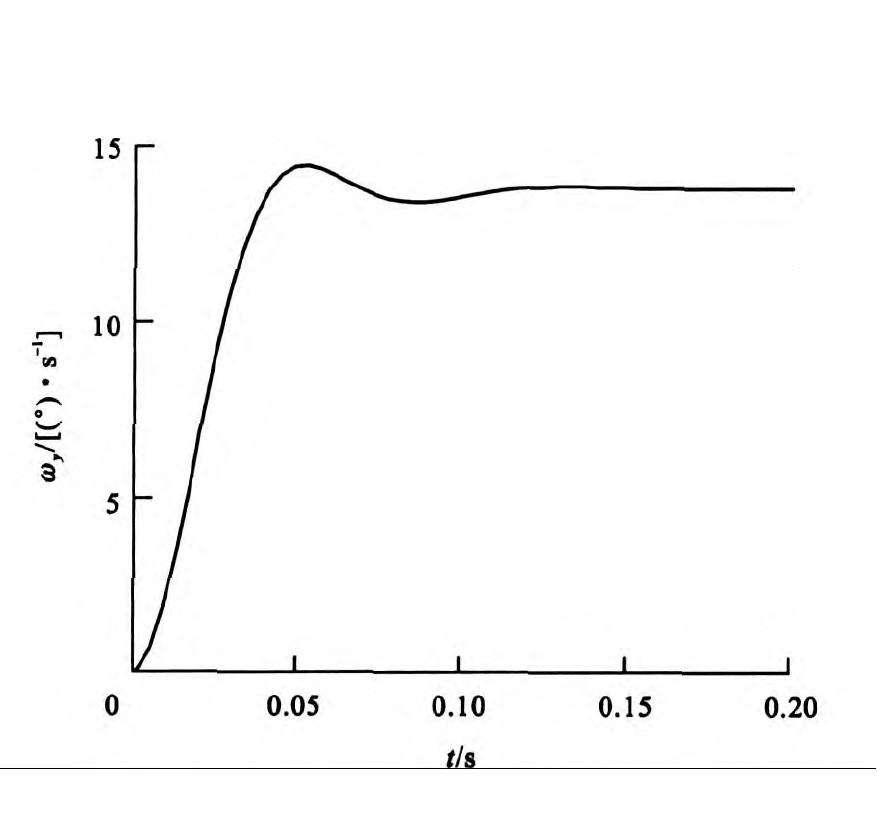
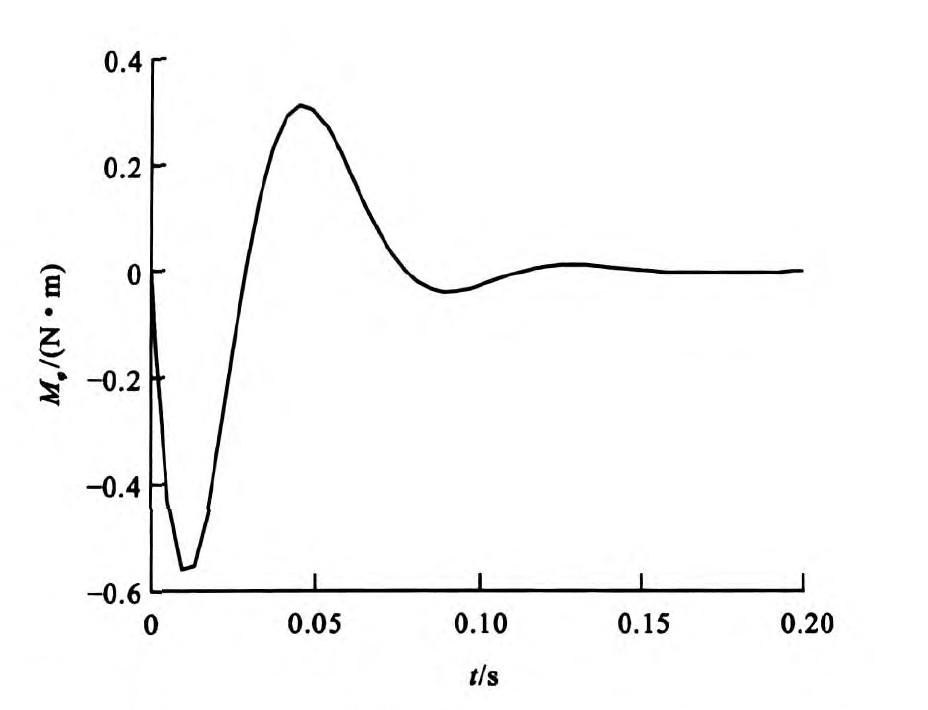
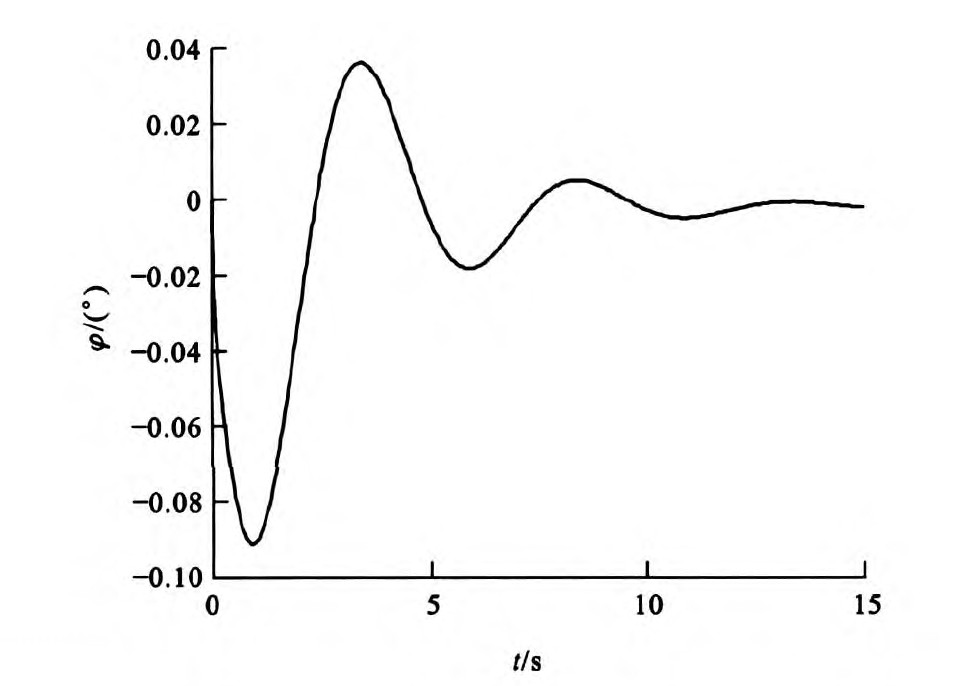
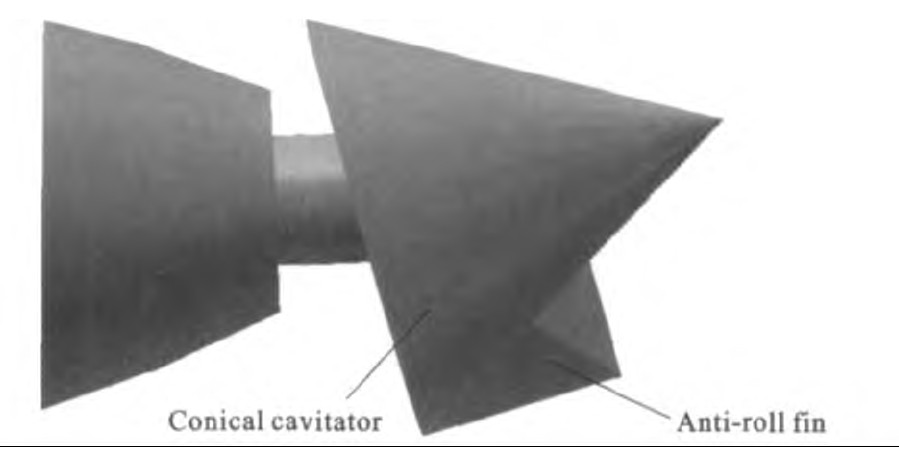
摘要: 针对超空泡航行器航向舵后置布局在强机动航行时舵效不足的问题, 建立了一种全新的兼顾直航与机动运动的控制面布局模式, 首次提出了非对称分布艏舵的超空泡航行器控制面总体方案, 采用双自由度空化器作为控制面, 水平偏转控制航向, 上下偏转控制俯仰和深度, 且在空化器下部复合抗横滚鳍片。针对某超空泡水下航行器进行了系统动态特性仿真分析, 横滚剩余力矩约从0.1s衰减至0, 极限横滚角小于0.1°。分析结果表明: 以空化器作为艏部航行舵替代常规布局的尾部航向舵, 可以显著提高舵效。Abstract: A novel hydrodynamic layout based on anisomerous bow rudder was firstly proposed for strongly maneuvering underwater supercavitating vehicle because aft rudder is short of effectiveness.In the layout, straight-and-level flight and strong maneuverability motion were considered.Bow rudder with 2 DOFs controlled orientation with deflexion in level, and controlled pitching or depth with up-and-down motion.Anti-roll fin appended below the rudder generated imbalances torque.For validating the dynamic characteristic of the design layout, related simulation on a supercavitating vehicle was carried out.The attenuation of remanent roll moment completes in about 0.1 s, and ultimate roll angle is less than 0.1°.Analytical result shows that the novel layout can markedly improve control rudder effectiveness.
-
[1] XU De-min, WU Xu-guang, REN Zhang, et al. The Automatic Control of Torpedo [M]. 2nd Edition. Xi'an: Northwestern Polytechnical University Press, 2001. (in Chinese) [2] KIRSCHNER I N, ROSENTHAL B J, UHLMAN J S. Simplified dynamical systems analysis of supercavitating highspeed bodies[C]//CAV. 5th International Symposium on Cavitation. Osaka: CAV, 2003: 1-8. [3] LI Dai-jin, LUO Kai, ZHANG Yu-wen, et al. Studies on fixed-depth control of supercavitating vehicles[J]. Acta Automatica Sinica, 2010, 36 (3): 421-426. [4] LUO Kai, DANG Jian-jun, WANG Yu-cai. Motion characteristics on vertical plane of superspeed underwater vehicle [J]. Torpedo Technology, 2007, 15(5): 37-40. (in Chinese) [5] LUO Kai, DUAN Peng, GAO Ya-qiang. A hydrodynamic layout of a new type supercavitating vehicle [J]. Computer Simulation, 2009, 26(11): 38-40, 101. (in Chinese) [6] AHN S S, RUZZENE M. Optimal design of cylindrical shells for enhanced buckling stability: application to supercavitating underwater vehicles[J]. Finite Elements in Analysis and Design, 2006, 42 (11): 967-976. doi: 10.1016/j.finel.2006.01.015 [7] CHOI J Y, RUZZENE M. Stability analysis of supercavitating underwater vehicles with adaptive cavitator[J]. International Journal of Mechanical Sciences, 2006, 48 (12): 1360-1370. doi: 10.1016/j.ijmecsci.2006.06.016 [8] KULKARNI S S, PRATAP R. Studies on the dynamics of a supercavitating projectile[J]. Applied Mathematical Modelling, 2000, 24 (2): 113-129. doi: 10.1016/S0307-904X(99)00028-1 -

 下载:
下载:
 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 537
- HTML全文浏览量: 67
- PDF下载量: 435
- 被引次数: 0
