

Simulation of energy-saving driving mode during steering for motorized wheels driving vehicle
Article Text (Baidu Translation)
-
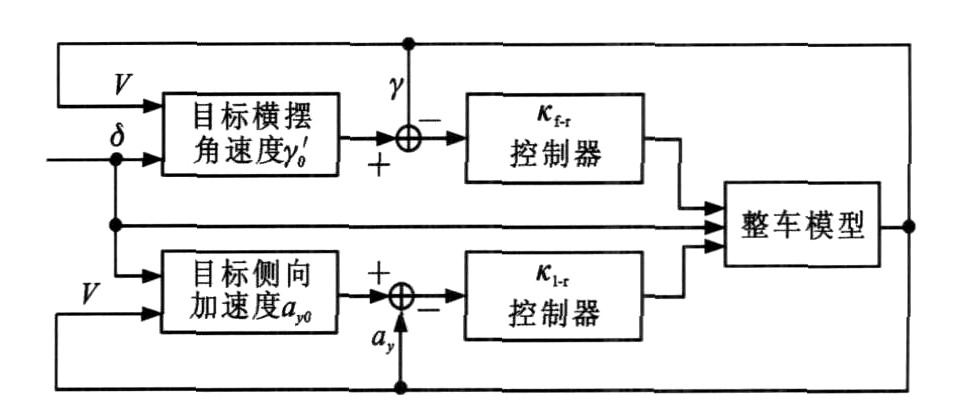
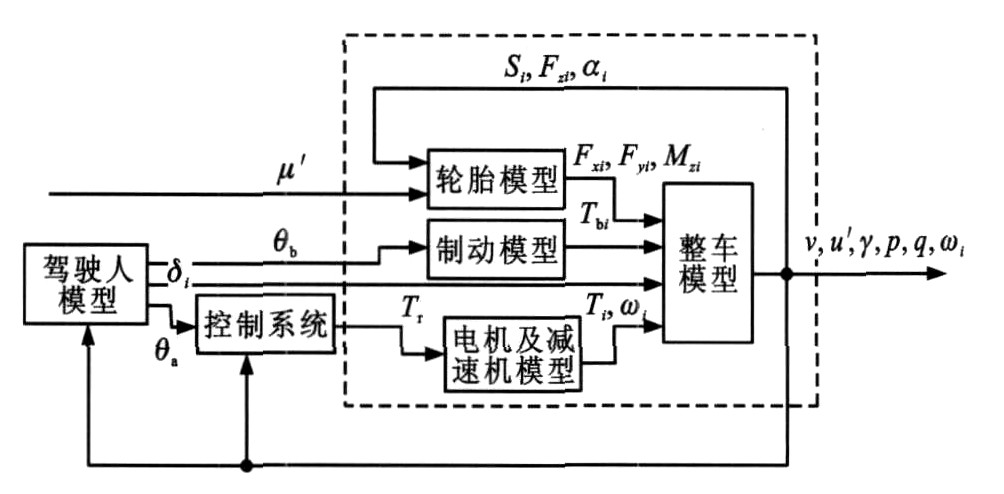
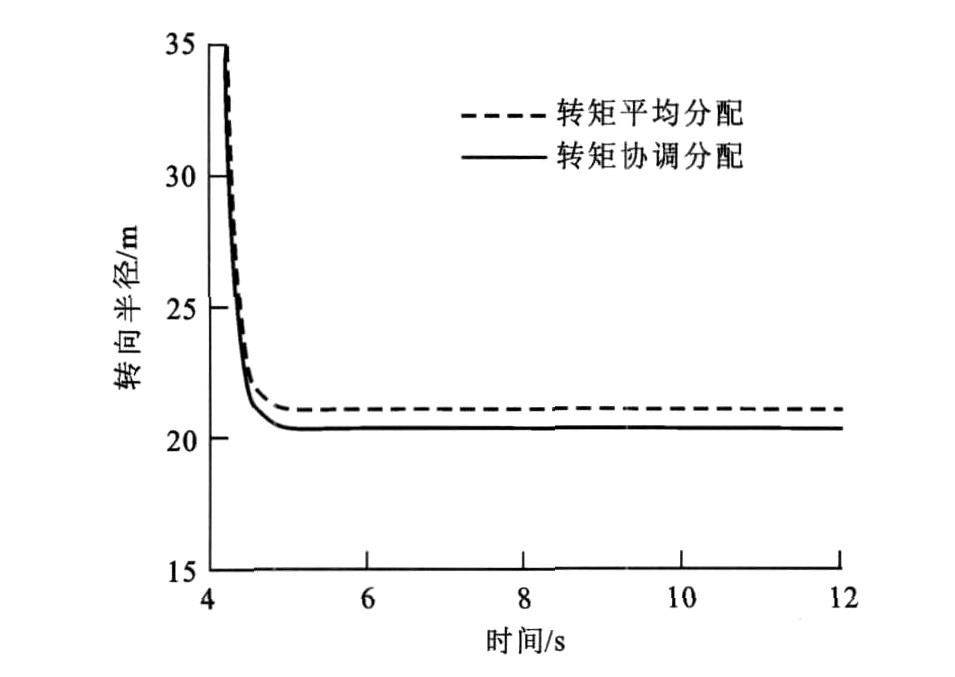
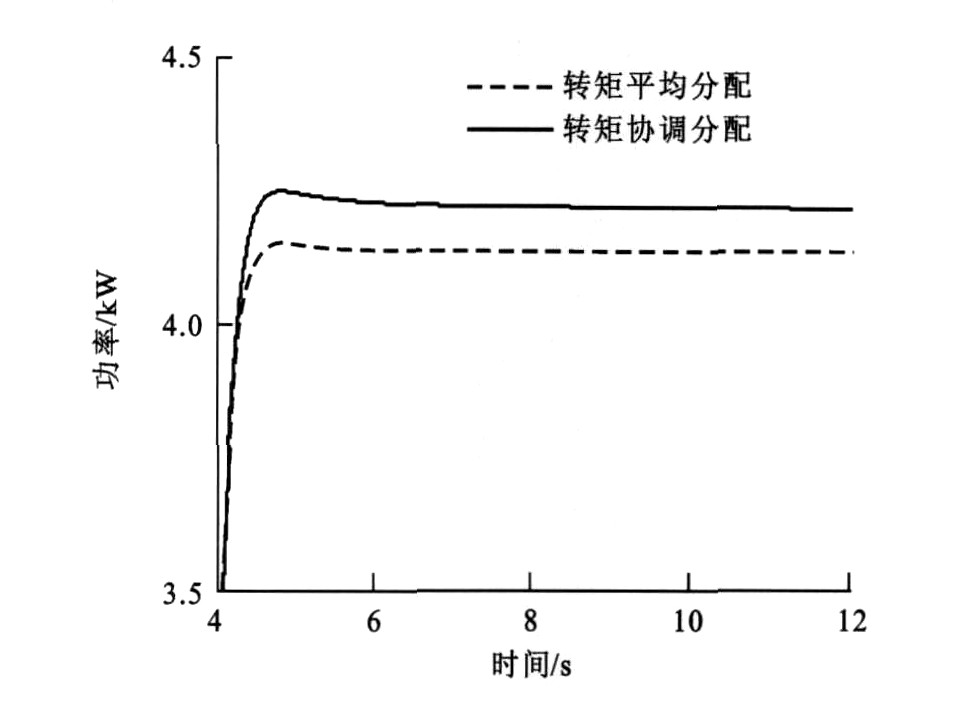
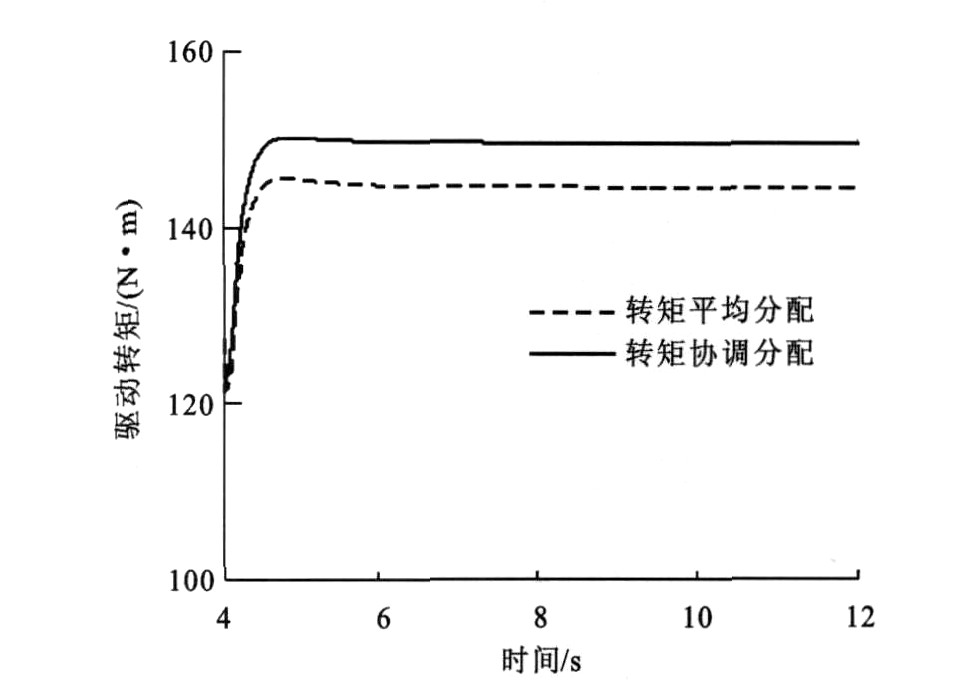
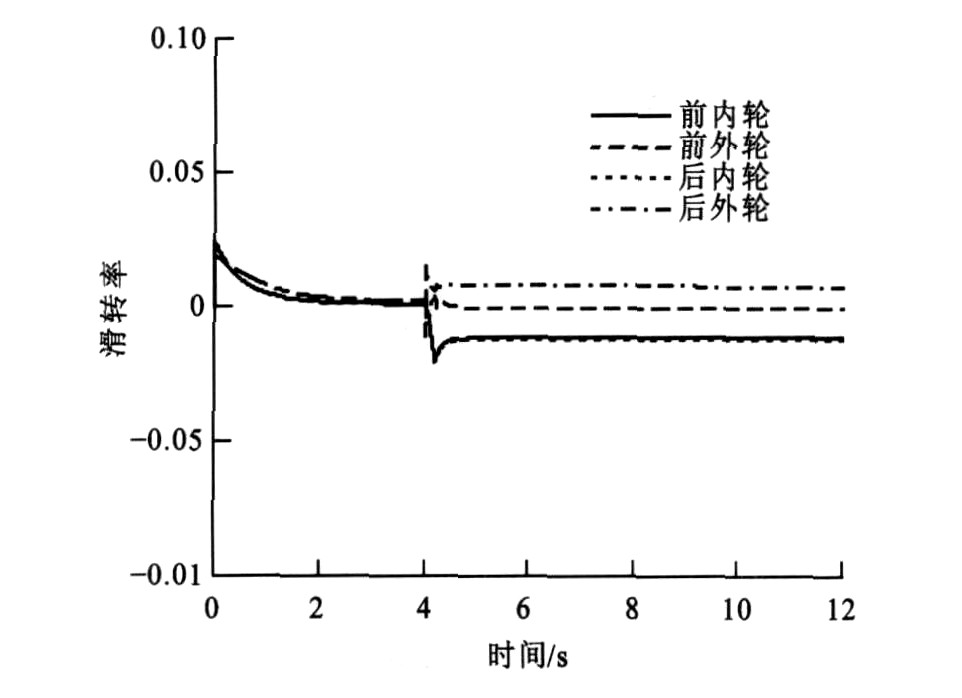
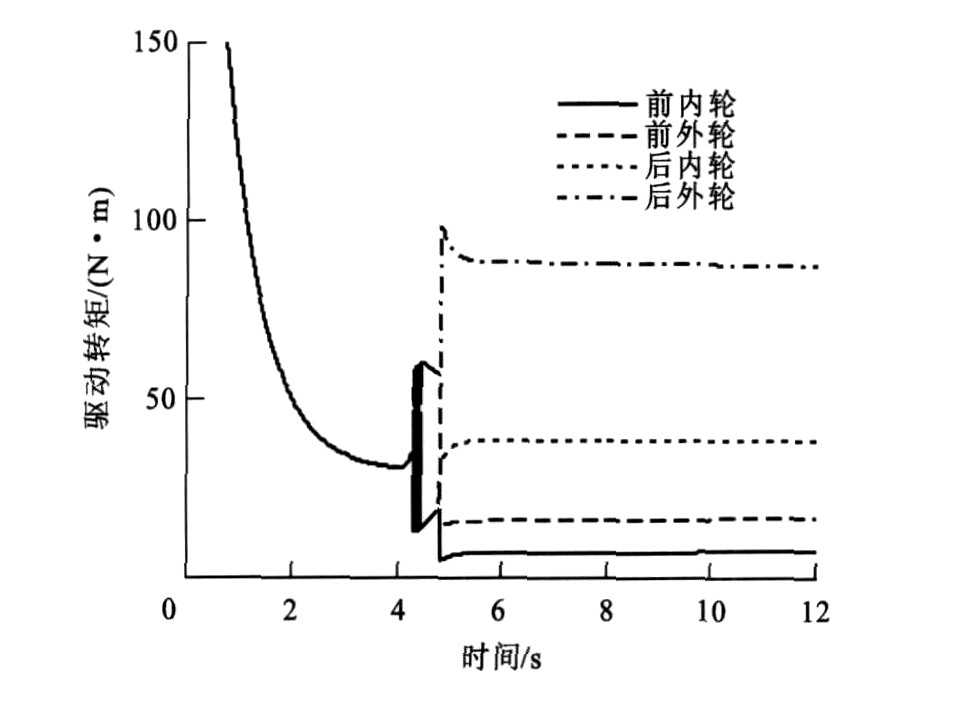
摘要: 为了研究电动轮驱动汽车在转向过程中的能量消耗特点, 分析了车辆曲线行驶时的阻力, 提出了车辆准中性转弯行驶的节能模式。在MATLAB/Simulink上建立了电动轮驱动汽车仿真模型, 利用横摆角速度作为控制变量对前后轴的转矩分配系数进行PID控制, 利用车辆的侧向加速度作为控制变量对左右轴的转矩分配系数进行PID控制, 并对车辆匀速转弯工况进行了仿真。仿真结果表明: 在准中性转向的行驶模式中, 车轮没有产生滑移现象, 后外轮上的驱动转矩明显大于其他车轮, 外侧车轮的转矩要大于内轮, 后轮的转矩要大于前轮, 车辆的功率消耗减小了1.15%。Abstract: In order to study the energy consumption feature of motorized wheels driving vehicle during steering, the resistance force was analyzed when the vehicle ran on curvy road, and a energy-saving mode of quasi-neutral steering was proposed. A simulation model of the vehicle was established by using MATLAB/Simulink, the yaw rate was taken as the control variable to control the front-rear torque distribution coefficient with PID, the lateral acceleration was taken as the control variable to control the left-right torque distribution coefficient with PID, and the steering condition at constant speed was simulated. Simulation result indicates that in the mode, no wheel slipping happens, the torque of rear-outer wheel is maximal, the torque of outer wheel is larger than the torque of inner wheel, the torque of rear wheel is larger than the torque of front wheel, and the power consumption decreases by 1.15%.
-
Key words:
- automotive engineering /
- motorized wheels /
- steering /
- energy-saving mode /
- simulation model
-
[1] MOKHIAMAR O, ABE M. Simultaneous optimal distribution of lateral and longitudinal tire forces for the model following control[J]. Journal of Dynamics System, Measurement and Control, 2004, 126(4): 753-763. doi: 10.1115/1.1850533 [2] MOKHI AMAR O, ABE M. How the four wheels should share forces in an optimum cooperative chassis control[J]. Control Engineering Practice, 2006, 14(3): 295-304. doi: 10.1016/j.conengprac.2005.03.023 [3] YANG Y P, LUH Y P, CHEUNG C H. Design and control of axial-flux brushless DC wheel motors for electric vehicles—part I: multiobjective optimal design and analysis[J]. IEEE Transactions on Magnetics, 2004, 40(4): 1873-1882. doi: 10.1109/TMAG.2004.828164 [4] 余卓平, 姜炜, 张立军. 四轮轮毂电机驱动电动汽车扭矩分配控制[J]. 同济大学学报: 自然科学版, 2008, 366(8): 1115-1119. doi: 10.3321/j.issn:0253-374X.2008.08.020YUZhuo-ping, JIANG Wei, ZHANG Li-jun. Torque distribution control for four wheel in-wheel-motor electric vehicle[J]. Journal of Tongji University: Natural Science, 2008, 366(8): 1115-1119. (in Chinese) doi: 10.3321/j.issn:0253-374X.2008.08.020 [5] 靳立强, 王庆年, 宋传学. 四轮独立驱动电动汽车动力学控制系统仿真[J]. 吉林大学学报: 工学版, 2004, 34(4): 547-553. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY200404006.htmJI N Li-qiang, WANG Qing-nian, SONG Chuan-xue. Simula-tion of4-wheel independent driving electric vehicle dynamics control system[J]. Journal of Jilin University: Engineering and Technology Edition, 2004, 34(4): 547-553. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY200404006.htm [6] 李春生. 双轮独立驱动电动车驱动系统的研究[D]. 杭州: 浙江大学, 2003.LI Chun-sheng. Study on the system of2-wheel independent driving electric vehicle[D]. Hangzhou: Zhejiang University, 2003. (in Chinese) [7] 范晶晶, 毛明. 基于经济性的三轴电传动车辆驱动力分配策略研究[J]. 车辆与动力技术, 2007(1): 49-51, 55. https://www.cnki.com.cn/Article/CJFDTOTAL-BGTK200701012.htmFANJing-jing, MAO Ming. Astudy of driving force distri-bution strategy for three-axles electric driving vehicle based on ecnomics[J]. Vehicle and Power Technology, 2007(1): 49-51, 55. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BGTK200701012.htm [8] OSBORN R P, SHI M T. Independent control of all-wheel-drive torque distribution[J]. Vehicle System Dynamics, 2006, 44(7): 529-546. [9] 张缓缓. 电动轮驱动电动车转矩协调控制研究[D]. 长春: 吉林大学, 2009.ZHANG Huan-huan. Research on the torque coordinating control of in-wheel motor driving electric vehicle[D]. Changchun: Jilin University, 2009. (in Chinese) [10] 王庆年, 张缓缓, 靳立强. 四轮独立驱动电动车转向驱动的转矩协调控制[J]. 吉林大学学报: 工学版, 2007, 37(5): 985-989. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY200705003.htmWANG Qing-nian, ZHANG Huan-huan, JI N Li-qiang. Torque coordinated control of four-wheel independent drive electric vehicles in cornering[J]. Journal of Jilin University: Engineering and Technology Edition, 2007, 37(5): 985-989. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY200705003.htm -

 下载:
下载:

 点击查看大图
点击查看大图
图(9)
计量
- 文章访问数: 668
- HTML全文浏览量: 171
- PDF下载量: 554
- 被引次数: 0
