

-
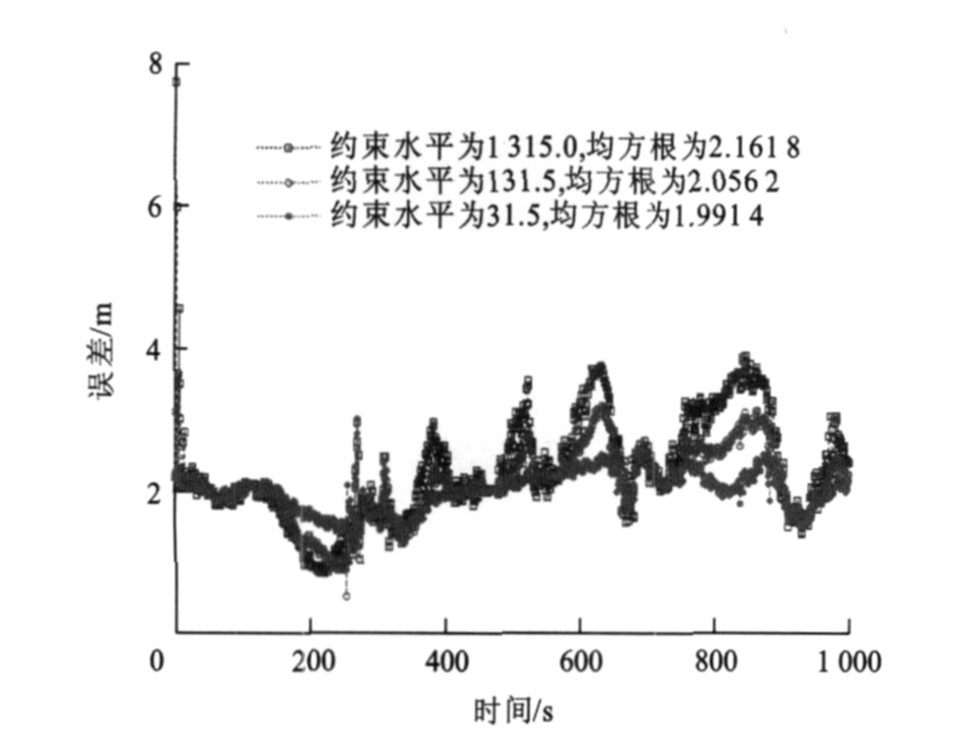
摘要: 针对列车组合定位融合估计的非线性以及鲁棒性问题, 分析了GNSS/INS列车组合定位的基本原理和系统结构, 给出了非线性滤波算法CKF的基本过程, 通过将H∞鲁棒滤波思想应用于标准CKF, 提出了一种基于CKF的新型鲁棒滤波算法, 从滤波器收敛判别及误差H∞范数界鲁棒性判别两方面探讨了滤波器的自主状态监测, 并采用青藏铁路实测数据对算法进行了验证。分析结果表明: 在该实测数据条件下, 所提算法平均估计误差与标准UKF、CKF相比, 分别降低了7.13%、4.85%;约束水平从31.5到1315.0时, 估计误差均方根增大了8.56%, 估计精度变化趋势较平缓, 该算法有效。Abstract: Based on the fusion estimation problems of nonlinearity and robustness in integrated train positioning, the principle and architecture of global navigation satellite system/inertial navigation system(GNSS/INS)integrated train positioning system were introduced, the scheme of CKF nonlinear filter approach was given, and a novel CKF-based robust filtering algorithm was presented by applying H∞ robust filter theory to standard CKF frame. The autonomous filter state monitoring was discussed for the proposed algorithm. The filter convergence criterion and the robustness criterion of error's H∞ norm bound were analyzed, and field tests in Qinghai-Tibet Railway were illustrated. Analysis result shows that under field test condition, the average estimation error of the proposed algorithm decreases by 7.13% and 4.85% respectively in comparison with standard UKF and CKF. The root mean square of estimation error increases by 8.56% with constraint level from 31.5 to 1 315.0, so the estimation precision changes mildly, and the algorithm is effective.
-

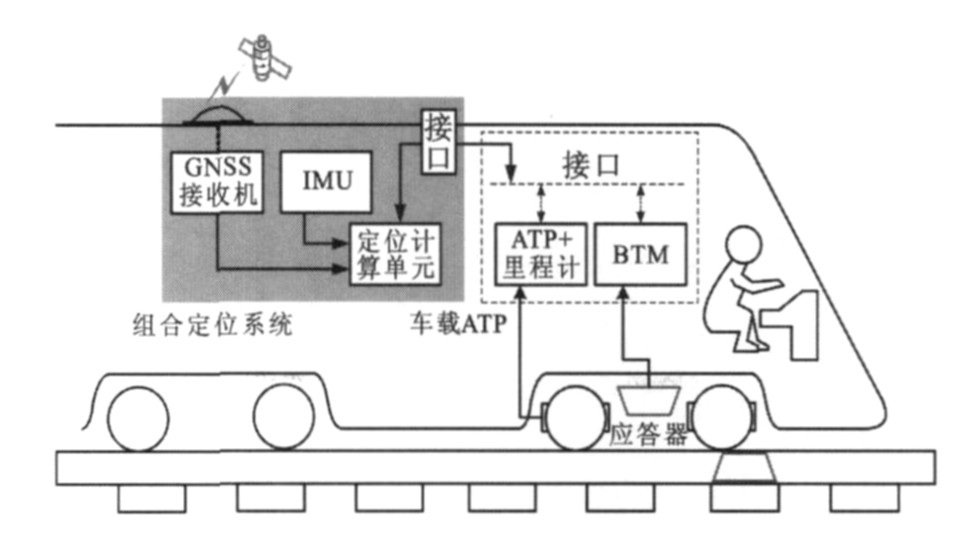
图 1 GNSS/INS列车组合定位系统结构
Figure 1. Structure of GNSS/INS integrated train positioning system

图 2 GNSS/INS列车组合定位功能原理
Figure 2. Functional principle of GNSS/INS integrated train positioning
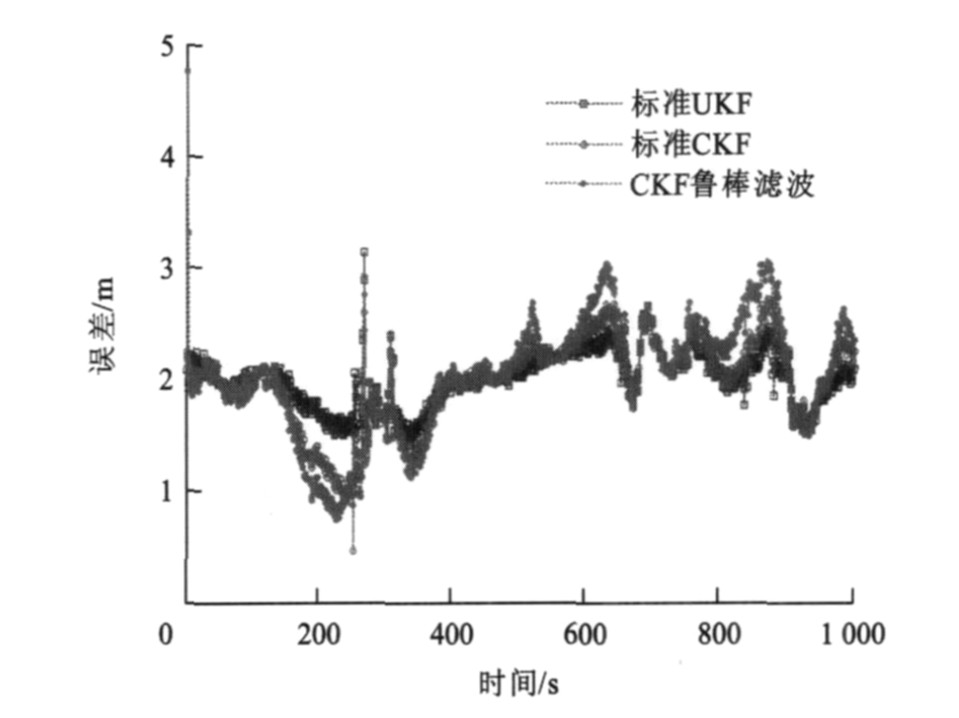
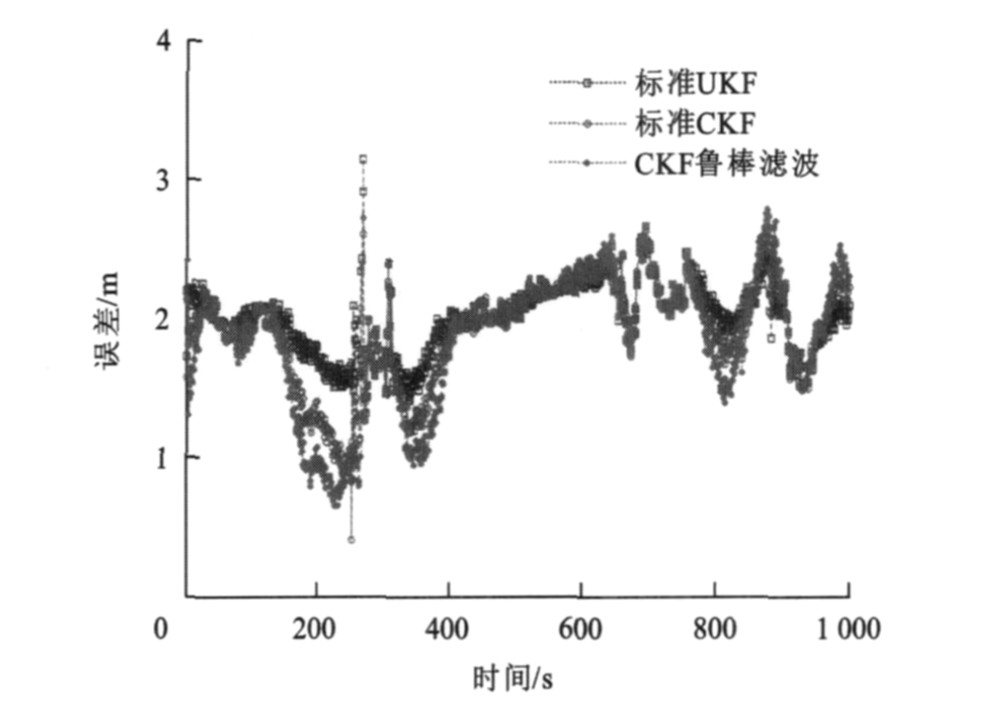
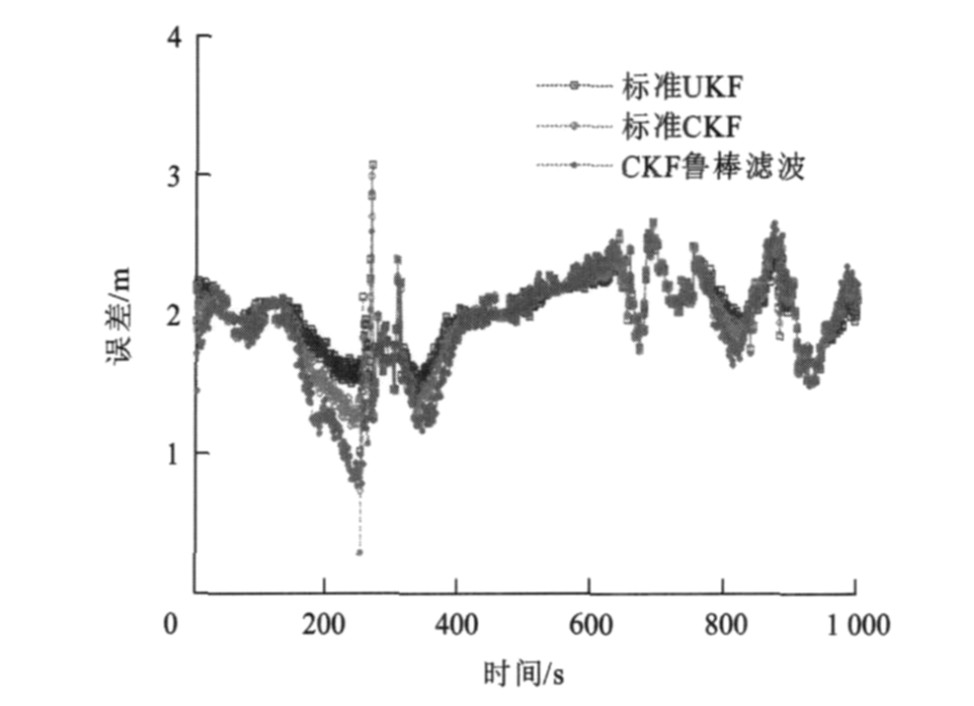
表 1 误差均值
Table 1. Means of position errors m
算法 方案1 方案2 方案3 UKF 1.986 4 1.986 2 1.986 0 CKF 1.958 0 1.902 8 1.952 6 CKF鲁棒滤波 1.934 4 1.724 2 1.875 1  下载: 导出CSV
下载: 导出CSV
-
[1] HENSEL S, HASBERG C. Bayesian techniques for onboard train localization[C]∥IEEE. Proceedings of IEEE/SP15th Workshop on Statistical Signal Processing. Cardiff: IEEE/SP, 2009: 361-364. [2] SAAB S. A map matching approachfor train positioning part II: application and experimentation[J]. IEEE Transactions on Vehicular Technology, 2000, 49(2): 476-484. doi: 10.1109/25.832979 [3] FILIP A, BAZANT L, TAUFER J, et al. Train-borne position integrity monitoring for GNSS/I NS based signalling[C]∥JSME. Proceedings of International Symposium on Speed-up and Service Technology for Rail way and Maglev Systems. Tokyo: JSME, 2003: 1-6. [4] GENGHI A, MARRADI L, MARTI NELLI L, et al. The rune project: design and demonstration of a GPS/EGNOS-based rail way user navigation equipment[C]∥ION. ION GPS/GNSS2003. Portland: ION, 2003: 225-237. [5] 王新屏, 张显库, 张丽坤. H∞鲁棒滤波器与Kal man滤波器的对比[J]. 系统工程与电子技术, 2003, 25(10): 1267-1269. doi: 10.3321/j.issn:1001-506X.2003.10.027WANG Xin-ping, ZHANG Xian-ku, ZHANG Li-kun. Com-parison ofH∞robust filter and Kal man filter[J]. Systems Engineering and Electronics, 2003, 25(10): 1267-1269. (in Chinese) doi: 10.3321/j.issn:1001-506X.2003.10.027 [6] SEOJ, YU MJ, PARK C G, et al. An extended robustH∞filter for nonlinear constrained uncertain systems[J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4471-4475. doi: 10.1109/TSP.2006.880308 [7] 侯代文. 非线性滤波及其在说话人跟踪中的应用研究[D]. 大连: 大连理工大学, 2008.HOU Dai-wen. Researeh on nonlinear filtering with applica-tion to speaker tracking[D]. Dalian: Dalian University of Technology, 2008. (in Chinese) [8] DAUM F. Nonlinear filters: beyond the Kal man filter[J]. IEEE Aerospace and Electronic Systems Magazine, 2005, 20(8): 57-69. doi: 10.1109/MAES.2005.1499276 [9] ARASARATNAMI, HAYKINS. Cubature Kal manfilters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. doi: 10.1109/TAC.2009.2019800 [10] 岳晓奎. 基于鲁棒滤波的低成本惯性组合导航系统研究[D]. 西安: 西北工业大学, 2002.YUE Xiao-kui. Research onlow-cost inertial integrated navi-gation system based on robust filter[D]. Xi an: North-western Polytechnical University, 2002. (in Chinese) [11] HAO Yan-ling, CHEN Ming-hui, LI Liang-jun, et al. Com-parison of robustH∞filter and Kal man filter for initial alignment of inertial navigation system[J]. Journal of Marine Science and Application, 2008, 7(2): 116-121. doi: 10.1007/s11804-008-7041-9 [12] 陈有荣, 袁建平. 一种改进的I NS/GPS组合导航鲁棒H∞多重渐消容错滤波算法[J]. 宇航学报, 2009, 30(3): 930-936. doi: 10.3873/j.issn.1000-1328.2009.03.017CHEN You-rong, YUAN Jian-ping. An improved robust H∞multiple fading fault-tolerant filtering algorithm for I NS/GPS integrated navigation[J]. Journal of Astronautics, 2009, 30(3): 930-936. (in Chinese) doi: 10.3873/j.issn.1000-1328.2009.03.017 -


 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 568
- HTML全文浏览量: 86
- PDF下载量: 691
- 被引次数: 0
