

Tentacle algorithm of obstacle avoidence and autonomous driving for intelligent vehicle
-
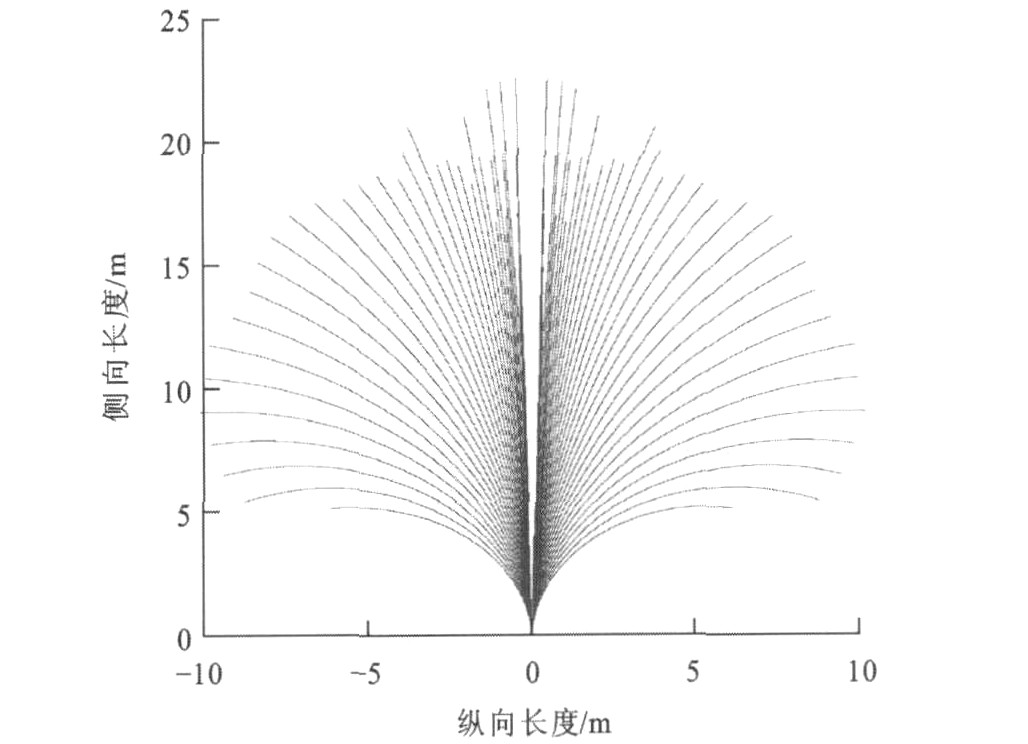
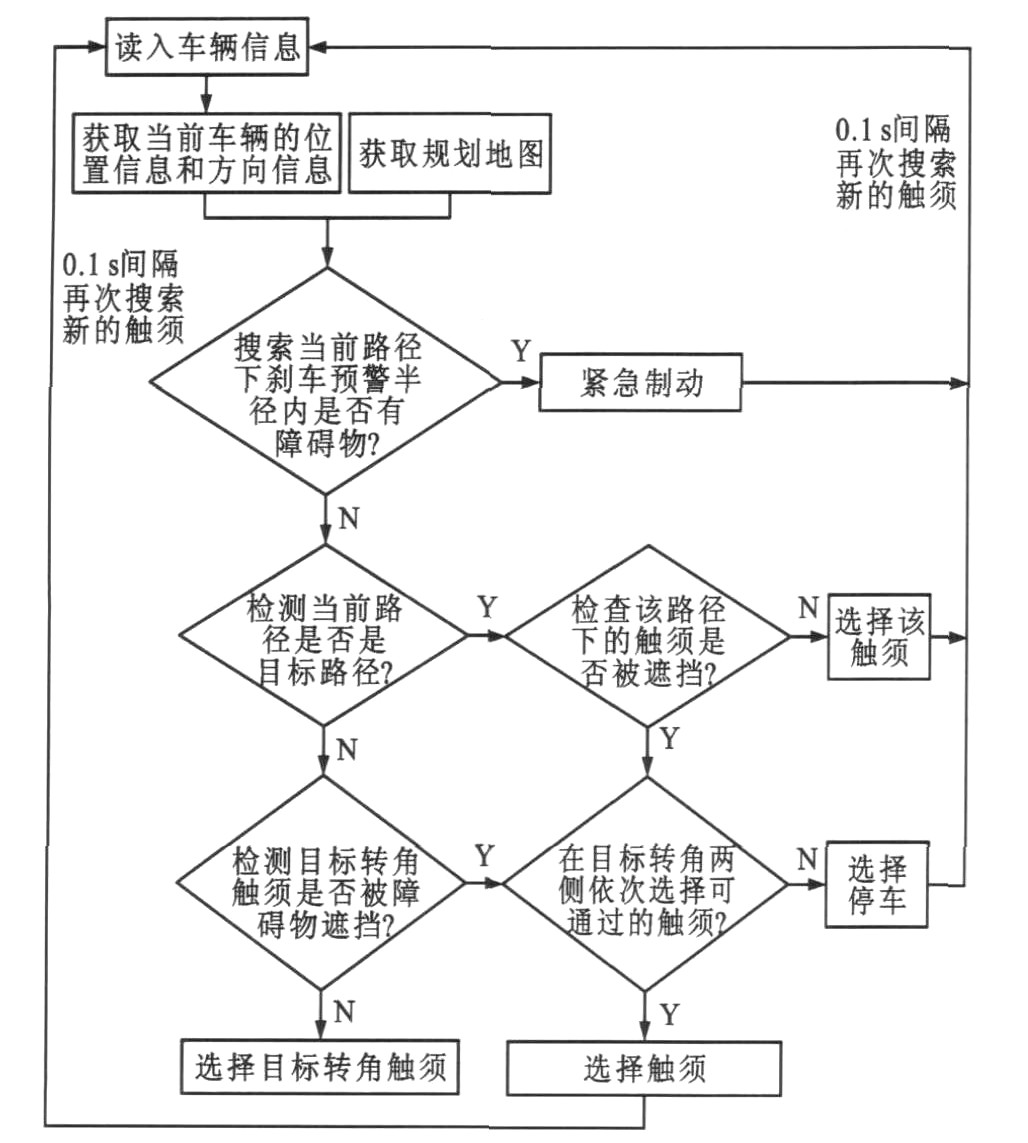
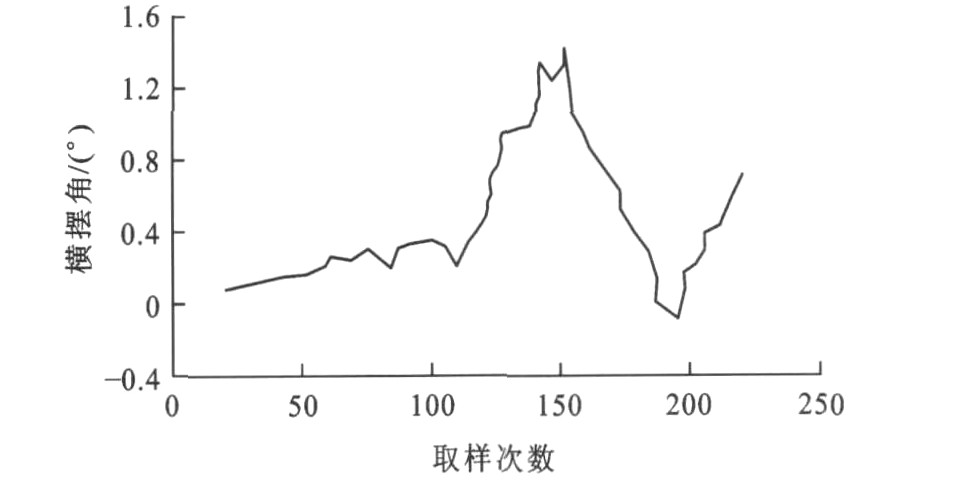
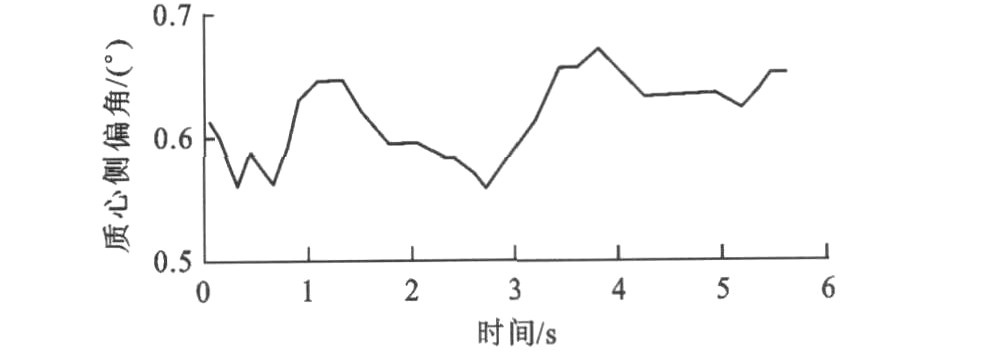
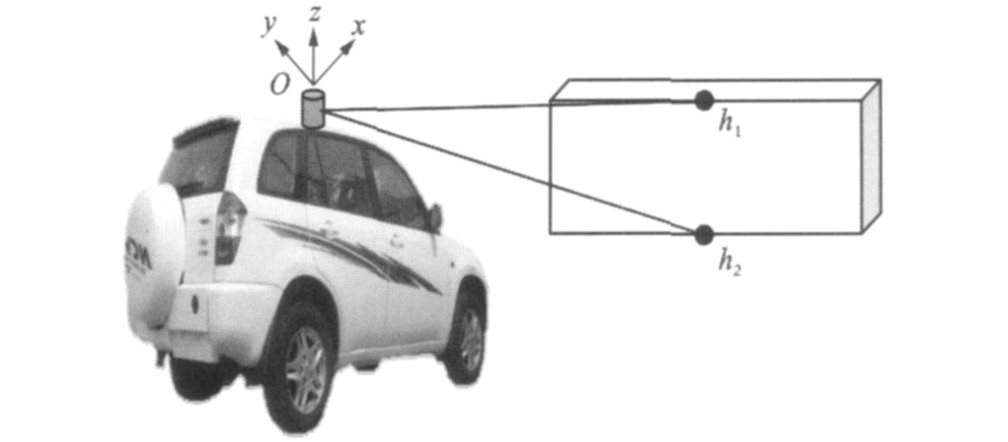
摘要: 从Velodyne雷达构建障碍物地图入手, 分析了触须构建方法、自主驾驶和避障策略。考虑车辆质心侧偏角对触须重构的影响, 运用卡尔曼滤波对惯导数据进行处理, 得出车辆纵向和侧向实时速度, 从而对质心侧偏角实时辨识, 并利用质心侧偏角对不同分组的触须进行修正。计算结果表明: 在中低速时, 轨迹误差由0.40 m减小到0.20 m; 在高速时, 通过采用性能优良的控制器和合理的融合参数使轨迹误差由1.00 m减小到0.75 m。可见, 采用修正的触须算法可以较好实现车辆自主驾驶和合理避障。Abstract: Obstacle map was established by using velodyne radar. Tentacle regeneration, autonomous driving and avoiding obstacle strategy were analyzed. The influence of sideslip angle on tentacle regeneration was considered. INS (inertial navigation system) sensors with GPS were integrated by Kalman filter, and the longitudinal velocity and lateral velocity of vehicle were obtained. Therefore, tentacle regeneration method corresponding to specific "speed sets" based on sideslip angle identification was promoted. At low-medium speed, trajectory error reduces from 0.40 m to 0.20 m. At high speed, because of using good-performance controller and appropriate fusion parameters, trajectory error reduces from 1.00 m to 0.75 m. Analysis result indicates that the promoted method effectively ensures obstacle avoidence and autonomous driving.
-
[1] 游峰. 智能车辆自动换道与自动超车控制方法的研究[D]. 长春: 吉林大学, 2005.YOUFeng. Study on autonomouslane changing and autonomous overtaking control method of intelligent vehicle[D]. Changchun: Jilin University, 2005. (in Chinese) [2] 沈中杰, 王武宏, 侯福国, 等. 智能交通信息网络环境下数字驾驶系统的体系结构与关键技术[J]. 交通运输工程学报, 2002, 2 (1): 96-100. http://transport.chd.edu.cn/article/id/200201021SHEN Zhong-jie, WANG Wu-hong, HOU Fu-guo, et al. Architecture and key techniques of digital driving system with in intelligent transport information network environment[J]. Journal of Traffic and Transportation Engineering, 2002, 2 (1): 96-100. (in Chinese) http://transport.chd.edu.cn/article/id/200201021 [3] FLETCHER L, TELLERS, OLSONE, et al. The mit-cornellcollision and why it happened[J]. Journal of Field Robotics, 2008, 25 (10): 775-807. doi: 10.1002/rob.20266 [4] MCBRIDE J R, I VANJ C, RHODE D S, et al. A perspec-tive on emerging automotive safety applications, derived from lessons learned through participation in the DARPA grandchallenges[J]. Journal of Field Robotics, 2008, 25 (10): 808-840. doi: 10.1002/rob.20264 [5] PATZ B J, PAPELIS Y, PILLAT R, et al. A practical approach to robotic design for the DARPA urban challenge[J]. Journal of Field Robotics, 2008, 25 (8): 528-566. doi: 10.1002/rob.20251 [6] URMSON C, ANHALT J, BAGNELL D, et al. Autono-mous driving in urban environments: boss and the urban challenge[J]. Journal of Field Robotics, 2008, 25 (8): 425-466. doi: 10.1002/rob.20255 [7] SUKRJ K, JUNG H G, BAE K, et al. Outlier rejection for cameras on intelligent vehicle[J]. Pattern Recognition Letters, 2008, 29 (6): 828-840. doi: 10.1016/j.patrec.2007.11.019 [8] ORDONEZ C, COLLI NS JR E G, SELEKWA M F, et al. The virtual wall approach to li mit cycle avoidance forunmanned ground vehicle[J]. Robotics and AutonomousSystems, 2008, 56 (8): 645-657. [9] THRUN S, MONTEMERLO M, DAHLKAMP H, et al. Stanley: the robot that won the DARPA grand challenge[J]. Journal of Field Robotics, 2006, 23 (9): 661-692. doi: 10.1002/rob.20147 [10] KASTRI NAKI V, ZERVAKIS M, KALAITZAKIS K. Asurvey of video processing techniques for traffic applications[J]. I mage and Vision Computing, 2003, 21 (4): 359-381. [11] HORI UCHI S, OKADA K, NOHTOMI S. I mprovement ofvehicle handling by nonlinear integrated control of four wheelsteering and four wheel torque[J]. JSAE Review, 1999, 20 (4): 459-464. doi: 10.1016/S0389-4304(99)00051-X [12] 高韬, 刘正光, 岳士宏, 等. 用于智能交通的运动车辆跟踪算法[J]. 中国公路学报, 2010, 23 (3): 89-94. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201003015.htmGAO Tao, LI UZheng-guang, YUE Shi-hong, et al. Movingvehicle tracking algorithm used for intelligent traffic[J]. China Journal of Highway and Transport, 2010, 23 (3): 89-94. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201003015.htm [13] 郑建霞. 红外线编码扫描式智能车辆分类计数器[J]. 长安大学学报: 自然科学版, 2003, 23 (3): 85-87. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200303024.htmZHENG Jian-xia. Infra-red intelligent vehicle classification counter[J]. Journal of Chang an University: Natural ScienceEdition, 2003, 23 (3): 85-87. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200303024.htm -

 下载:
下载:
 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 960
- HTML全文浏览量: 152
- PDF下载量: 621
- 被引次数: 0
