

Extreme short-time prediction technology of high speed unmanned surface vehicle motion
Article Text (Baidu Translation)
-
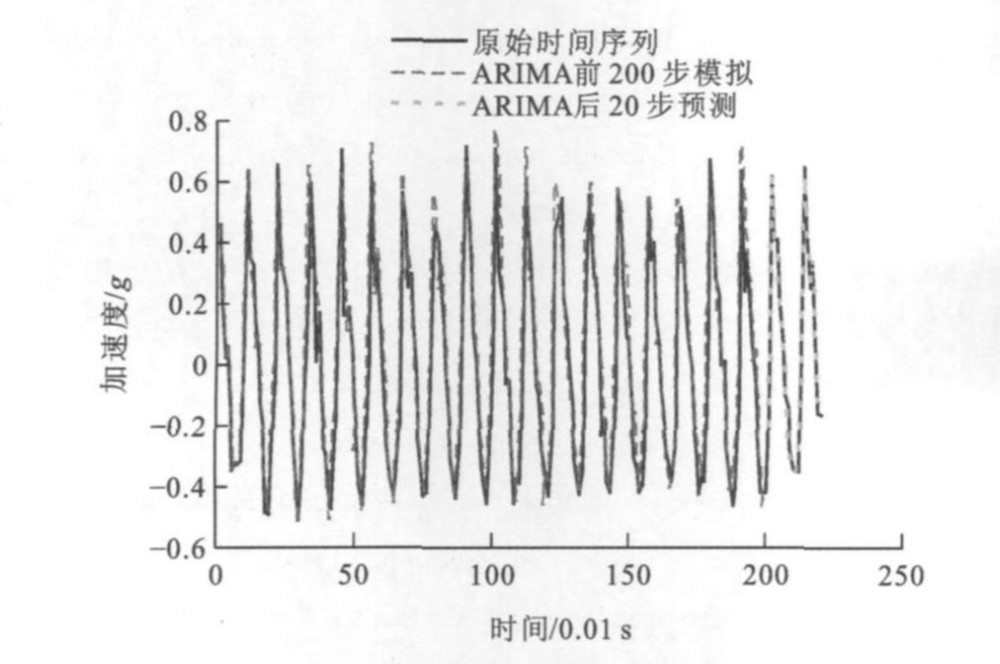
摘要: 采用基于时间序列的乘积季节ARIMA(求和自回归移动平均)模型以及无人艇模型规则波试验数据, 研究了水面无人艇运动极短期预报技术。采用经趋势差分和季节差分后的ARMA(自回归移动平均)模型, 运用最小信息准则和白噪声检验方法, 验证所选择的最佳模型, 并对无人艇进行了20步极短期运动预报。计算结果表明: 无人艇船模加速度、升沉、纵摇的前10步短期预报最大误差均不超过6%, 随着预测步数的增加, 误差有扩大的趋势, 加速度的后10步短期预报最大误差达到16.68%。可见, 极短期预报技术有效。Abstract: Multiple seasonal ARIMA(auto regressive integrated moving average) model based on time series was used, the extreme short-time prediction technology of unmanned surface vehicle motion was studied based on the seakeeping test data of boat model in regular wave.ARMA(auto regressive moving average) models with trend difference and seasonal difference were adopted, Akaike information criterion and white noise inspection method were carried out, and the chosen best model was validated.Extreme short-time prediction in twenty steps was made for unmanned surface vehicle.Calculation result indicates that the maximum errors are not more than 6% in the former ten-step predictions of acceleration, heave and pitch.With the increase of prediction step, the error has enlarging trend, the maximum error reaches to 16.68% in the following ten-step prediction of acceleration.So extreme short-time prediction technology is effective.
-
表 1 模型的序列特征
Table 1. Sequence features of models
模型 AR(p) MA(q) ARMA(p, q) Ca 拖尾 截尾(k=q) 拖尾 Cp 截尾(k=p) 拖尾 拖尾  下载: 导出CSV
下载: 导出CSV
表 2 AIC值对比
Table 2. Comparison of AIC values
序列模型 AIC值 AR(1) -227.160 AR(2) -259.042 MA(1) -298.044 ARMA(1, 1) -288.477 ARMA(2, 1) -275.447
下载: 导出CSV
表 3 白噪声检验
Table 3. Test of white noise
检验量 自由度 统计值 概率值 Jarque-Bera 2 5.757 0.056 Box-Pierce 6 11.787 0.067 Ljung-Box 6 12.156 0.059 McLeod-Li 6 13.572 0.065
下载: 导出CSV
-
[1] 高双, 朱齐丹, 李磊. 滑行艇高速运动建模与姿态控制仿真[J]. 系统仿真学报, 2008, 20(16): 4461-4465. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200816059.htmGAO Shuang, ZHU Qi-dan, LI Lei. Simulation of sliding ship's high-speed modeling and attitude control[J]. Journal of System Simulation, 2008, 20(16): 4461-4465. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200816059.htm [2] 陈鸶鹭, 程海边. 基于模糊神经网络控制的水面无人艇建模与仿真[J]. 舰船科学技术, 2010, 32(11): 134-136, 156. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201011036.htmCHEN Si-lu, CHENG Hai-bian. Modeling and simulation based on fuzzy neural network for unmanned surface vehicle[J]. Ship Science and Technology, 2010, 32(11): 134-136, 156. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201011036.htm [3] 赵希人, 彭秀艳, 沈艳, 等. 舰船运动极短期建模预报的研究现状[J]. 船舶工程, 2002(3): 4-8. https://www.cnki.com.cn/Article/CJFDTOTAL-CANB200203001.htmZHAO Xi-ren, PENG Xiu-yan, SHEN Yan, et al. Study sta-tus quo of extremely short-time modeling and predicting of ship motion[J]. Ship Engineering, 2002(3): 4-8. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CANB200203001.htm [4] 彭秀艳, 赵希人, 吕淑萍, 等. 具有艏前波观测量的大型舰船姿态运动预报[J]. 系统仿真学报, 2002, 14(6): 809-814. doi: 10.3969/j.issn.1004-731X.2002.06.035PENG Xiu-yan, ZHAO Xi-ren, LU Shu-ping, et al. Prediction of big ship motion with wave survey[J]. Journal of System Simulation, 2002, 14(6): 809-814. (in Chinese). doi: 10.3969/j.issn.1004-731X.2002.06.035 [5] 赵希人, 彭秀艳, 吕淑萍, 等. 具有艏前波观测量的大型舰船姿态运动极短期预报[J]. 船舶力学, 2003, 7(2): 39-44. doi: 10.3969/j.issn.1007-7294.2003.02.005ZHAO Xi-ren, PENG Xiu-yan, LU Shu-ping, et al. Extreme short prediction of big ship motion having wave survey[J]. Journal of Ship Mechanics, 2003, 7(2): 39-44. (in Chinese). doi: 10.3969/j.issn.1007-7294.2003.02.005 [6] 赵源, 腾大予. 多维AR(p)模型在预报舰船运动中的应用[J]. 现代防御技术, 2003, 31(4): 52-55, 60. https://www.cnki.com.cn/Article/CJFDTOTAL-XDFJ200304012.htmZHAO Yuan, TENG Da-yu. Application of multidimensional AR(p)model in forecasting the state of ship movement[J]. Modern Defence Technology, 2003, 31(4): 52-55, 60. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDFJ200304012.htm [7] PENG Xiu-yan, ZHAO Xi-ren, XU Lin-lin. Real-time pre-diction algorithm research of ship attitude motion based on order selection with corner condition[C]//IEEE. 1st International Symposium on Systems and Control in Aerospace and Astronautics. Harbin: IEEE, 2006: 1070-1075. [8] 马洁, 韩蕴韬, 李国斌. 基于自回归模型的船舶姿态运动预报[J]. 舰船科学技术, 2006, 28(3): 28-30. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX200603005.htmMA Jie, HAN Yun-tao, LI Guo-bin. Prediction of ship pitching motion based on AR method[J]. Ship Science and Technology, 2006, 28(3): 28-30. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX200603005.htm [9] 马洁, 李国斌. 船舶横摇运动的时间序列预报[J]. 北京机械工业学院学报, 2006, 21(1): 4-7. https://www.cnki.com.cn/Article/CJFDTOTAL-BJGY200601001.htmMA Jie, LI Guo-bin. Time series prediction of ship rolling[J]. Journal of Beijing Institute of Machinery, 2006, 2(1): 4-7. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJGY200601001.htm [10] 彭秀艳, 赵希人, 高奇峰. 船舶姿态运动实时预报算法研究[J]. 系统仿真学报, 2007, 19(2): 267-271. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200702010.htmPENG Xiu-yan, ZHAO Xi-ren, GAO Qi-feng. Research on real-time prediction algorithm of ship attitude motion[J]. Journal of System Simulation, 2007, 19(2): 267-271. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200702010.htm [11] WEI Dong, YE Jia-wei, WU Xi, et al. Time series prediction for generalized heave displacement of a shipborne helicopterplatform[C]//IEEE. 2008ISECS International Colloquium on Computing, Communication, Control, and Management. Washington DC: IEEE, 2008: 80-84. [12] 张恒, 李积德, 赵晓东. 基于系统辨识方法求解船舶非线性运动响应[J]. 大连海事大学学报, 2008, 34(4): 67-71. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS200804017.htmZHANG Heng, LI Ji-de, ZHAO Xiao-dong. Nonlinear motion response of ship based on system identification method[J]. Journal of Dalian Maritime University, 2008, 34(4): 67-71. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS200804017.htm [13] 杨奕飞, 王恒. 基于时间序列预报模型的船摇前馈量计算[J]. 现代雷达, 2009, 31(10): 51-54. https://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200910013.htmYANG Yi-fei, WANG Heng. Calculation method of shipsway feedforward compensation based on time series prediction model[J]. Modern Radar, 2009, 31(10): 51-54. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200910013.htm [14] 马洁. 船舶纵摇运动预报AR法和多层递阶方法比较研究[C]//中国自动化学会. 2009中国智能自动化会议论文集. 北京: 中国自动化学会, 2009: 1040-1047. MA Jie. The study of comparisons among AR method and multi-level recursive method to ships'pitching movment[C]//Chinese Association of Automation. Proceedings of 2009 Chinese Intelligentize Robotization. Beijing: Chinese Association of Automation, 2009: 1040-1047. (in Chinese). [15] 武瑞花. 船舶横摇运动时间序列的分析、建模与预报研究[D]. 大连: 大连海事大学, 2008.WU Rui-hua. Ship rolling time series analysis, modeling and prediction[D]. Dalian: Dalian Maritime University, 2008. (in Chinese). -




 点击查看大图
点击查看大图
图(13) / 表(3)
计量
- 文章访问数: 1140
- HTML全文浏览量: 205
- PDF下载量: 706
- 被引次数: 0
