

Energy availability of active suspension without external energy supply
Article Text (Baidu Translation)
-
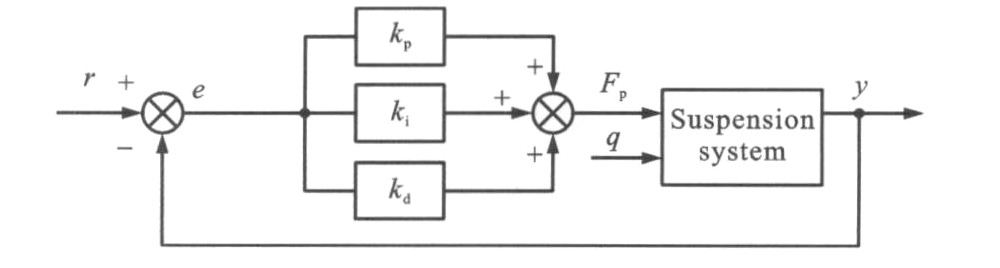
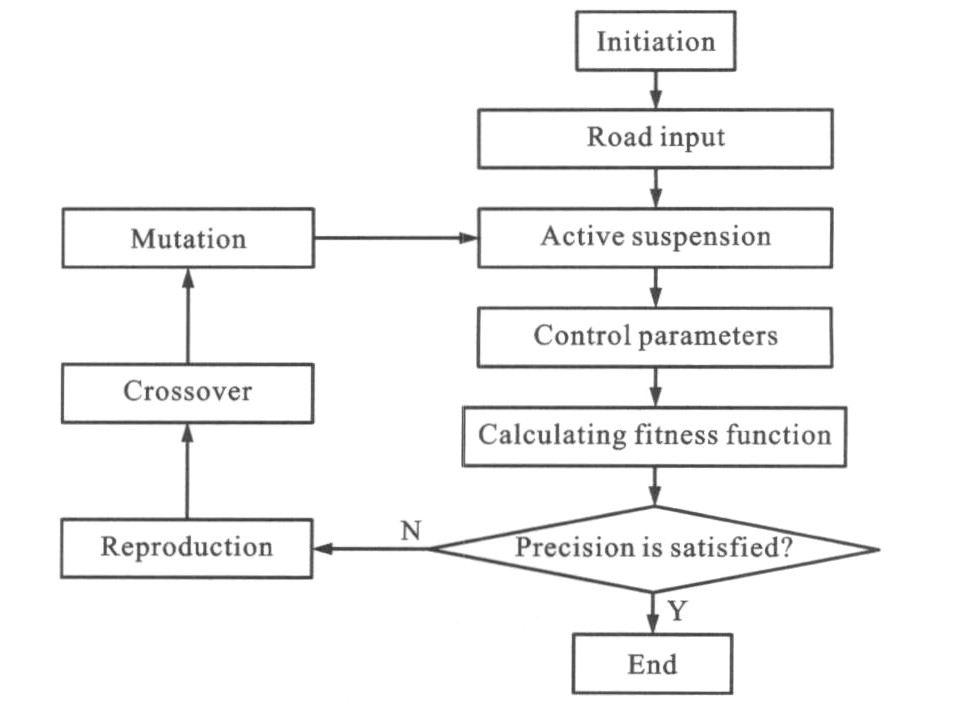
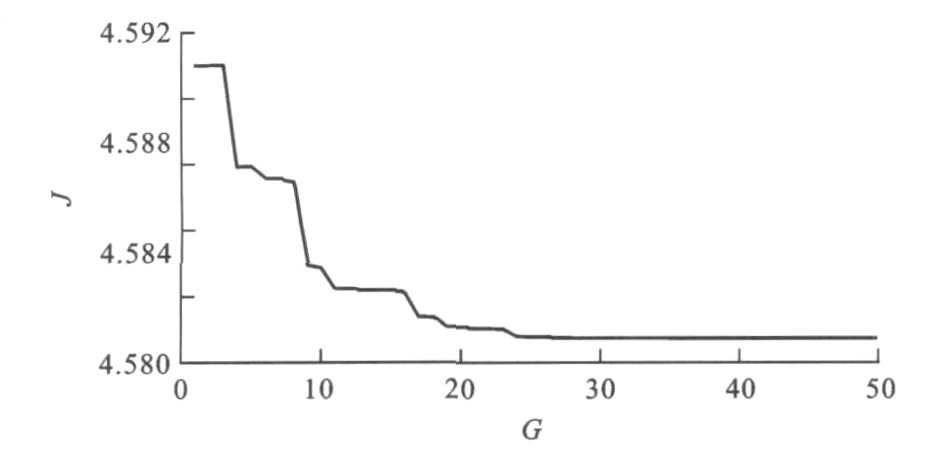
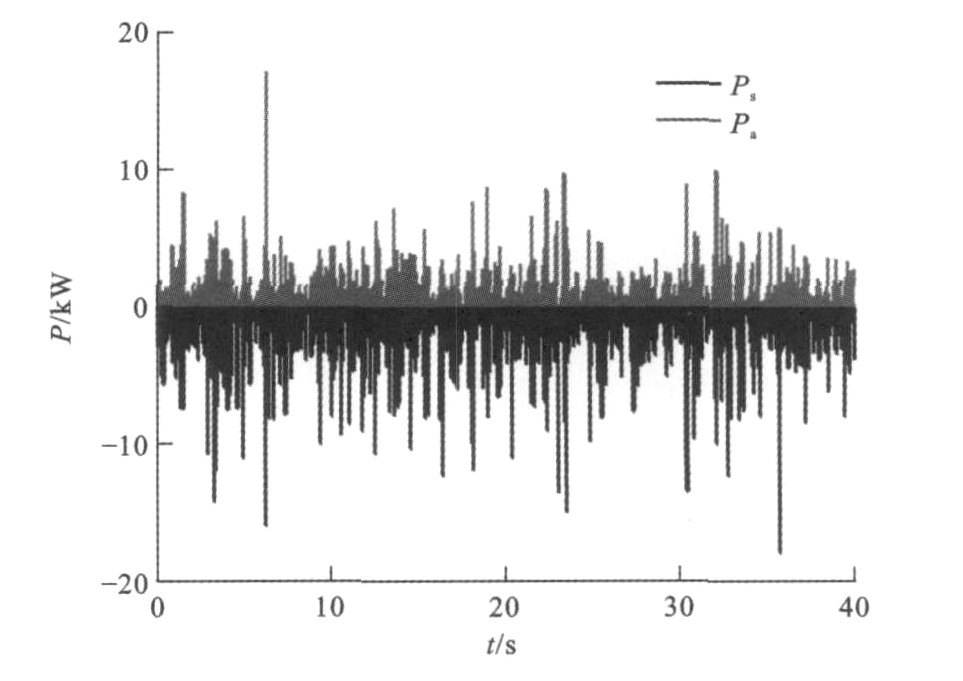
摘要: 将无外界动力源的主动悬架在半主动模式下吸收平均功率与在主动模式下消耗平均功率的绝对值比作为能量可用性的评价指标, 分析了优化PID与LQG控制主动悬架的性能与能量可用性。针对某重型汽车的1/4车主动悬架模型, 设计了PID与LQG控制器。当悬架阻尼比为0.1时, 以悬架二次型性能指标为目标函数, 利用遗传算法对PID控制器参数进行了优化。发现优化PID控制主动悬架的二次型性能指标较LQG控制主动悬架大3.32%, 优化PID与LQG控制主动悬架的能量可用性评价指标分别为17.15和226.33。分析结果表明: LQG控制主动悬架的性能略优于优化PID控制主动悬架; 2种主动悬架均满足能量可用性要求, 且LQG控制主动悬架的能量可用性远优于优化PID控制主动悬架。Abstract: The absolute ratio of mean power reclaimed in the semi-active control mode divided by the value consumed in the active control mode was proposed as the evaluating index of energy availability for active suspension without external energy supply(ASWEES).The performance and energy availability of ASWEES were analyzed based on optimized PID and LQG controllers, which were designed for a quarter-heavy-vehicle ASWEES.When the damping ratio was 0.1, PID control parameters were optimized by using the genetic algorithm with suspension quadratic performance index taken as the objective function.It is pointed that the suspension quadratic performance index of ASWEES based on optimized PID control is 3.32% bigger than the index based on LQG control, and their energy availability indexes are 17.15 and 226.33 respectively.The result indicates that the performance of ASWEES based on LQG control is weakly better, two ASWEESs meet the demand of energy availability, and the energy availability of ASWEES based on LQG control is strongly better.
-
Table 1. Parameters of passive suspension and road inputs
Parameter Value Parameter Value m1/kg 350 k1/(N·m-1) 3.0×106 m2/kg 5 000 k2/(N·m-1) 5.05×105 c/(N·s·m-1) 30 150 Gq(n0)/(m2·m-1) 2.56×10-4 f0/Hz 0.22  下载: 导出CSV
下载: 导出CSV
Table 3. σ2(a2), σ2(x1-q) andσ2(fd)
σ2(a2)/(m·s-2)2 σ2(x1-q)/m2 σ2(fd)/m2 4.516 2 1.847 5×10-5 1.557 7×10-4
下载: 导出CSV
Table 4. Proportional coefficients and weights
Coefficient Value Weight Value β1 2 444 δ1 105 060 β2 27 081 δ2 3 000.6
下载: 导出CSV
Table 5. Parameter settings
Parameter Value Parameter Value Max number of generation 50 Mutation rate 0.017 5 Initial population size 60 Scope of kp [0, 20 000] Crossover rate 0.7 Scope of ki [0, 200 000] Generation gap 0.9 Scope of kd [0, 10]
下载: 导出CSV
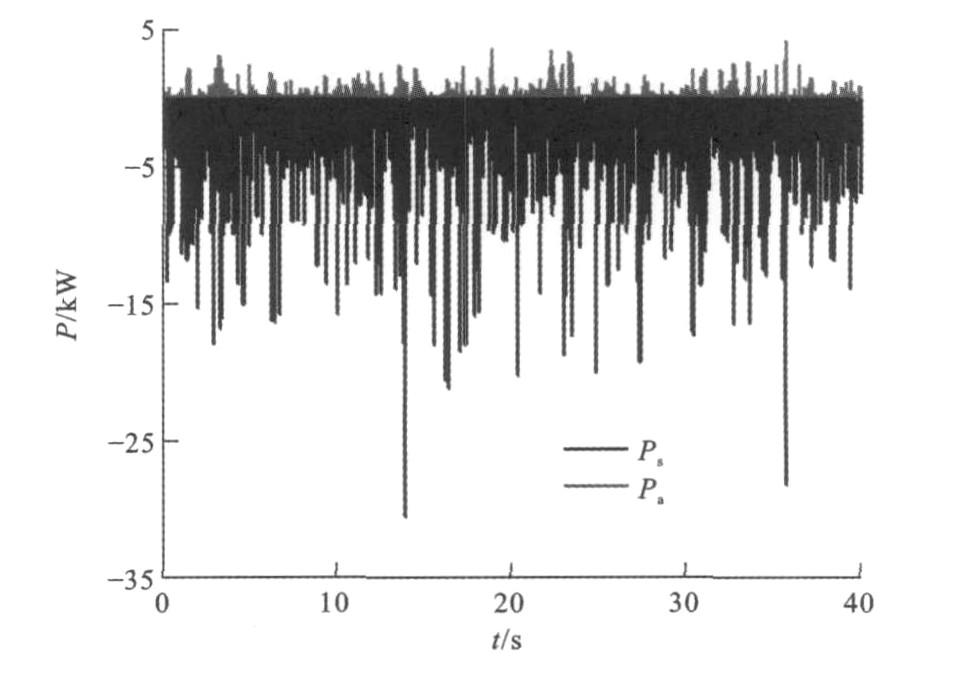
Table 6. Data ofσ(a2), σ(x1-q), σ(fd), J, Psand Pa
Parameter Optimized PID control LQG control σ(a2) /(m·s-2) 1.228 8 1.380 3 σ(fd)/m 0.014 2 0.012 9 σ(x1-q)/m 0.004 8 0.004 4 J 4.580 9 4.428 6 Ps/kW -1.179 2 -2.919 6 Pa/kW 0.068 4 0.128 9
下载: 导出CSV
-
[1] ZAREH S H, SARRAFAN A, KHAYYAT A A, et al. Intelligent semi-active vibration control of eleven degrees of freedom suspension system using magnetorheological dampers[J]. Journal of Mechanical Science and Technology, 2012, 26(2): 323-334. doi: 10.1007/s12206-011-1007-6 [2] CREWS J H, MATTSON M G, BUCKNER G D. Multi-objective control optimization for semi-active vehicle suspensions[J]. Journal of Sound and Vibration, 2011, 330(23): 5502-5516. doi: 10.1016/j.jsv.2011.05.036 [3] MALEKSHAHI A, MIRZAEI M. Designing a non-linear tracking controller for vehicle active suspension systems using an optimization process[J]. International Journal of Automotive Technology, 2012, 13(2): 263-271. doi: 10.1007/s12239-012-0023-6 [4] YIM S. Design of a robust controller for rollover prevention with active suspension and differential braking[J]. Journal of Mechanical Science and Technology, 2012, 26(1): 213-222. doi: 10.1007/s12206-011-0915-9 [5] LIU Shu-bo, ZHAO Ding-xuan. H∞/generalized H2 static output feedback control method for active suspension[J]. China Journal of Highway and Transport, 2009, 22(4): 122-126. [6] EBRAHIMI B, BOLANDHEMMAT H, KHAMESEE M B, et al. A hybrid electromagnetic shock absorber for active vehicle suspension systems[J]. Vehicle System Dynamics, 2011, 49(1/2): 311-332. [7] RYU S, KIM Y, PARK Y. Robust H∞ preview control of an active suspension system with norm-bounded uncertainties[J]. International Journal of Automotive Technology, 2008, 9(5): 585-592. doi: 10.1007/s12239-008-0069-7 [8] GAO Hui-jun, SUN Wei-chao, SHI Peng. Robust sampled-data H∞ control for vehicle active suspension systems[J]. IEEE Transactions on Control Systems Technology, 2010, 18(1): 238-245. doi: 10.1109/TCST.2009.2015653 [9] DAVID S B, BOBROVSKY B Z. Actively controlled vehicle suspension with energy regeneration capabilities[J]. Vehicle System Dynamics, 2011, 49(6): 833-854. doi: 10.1080/00423114.2010.488295 [10] MONTAZERI-GH M, SOLEYMANI M. Investigation of theenergy regeneration of active suspension system in hybridelectric vehicles[J]. IEEE Transactions on Industrial Elec-tronics, 2010, 57(3): 918-925. doi: 10.1109/TIE.2009.2034682 [11] HUANG K, YU F, ZHANG Y. Active controller design foran electromagnetic energy-regenerative suspension[J]. International Journal of Automotive Technology, 2011, 12(6): 877-885. doi: 10.1007/s12239-011-0100-2 [12] CHEN Shi-an, HE Ren, LU Sen-lin. New reclaiming energy suspension and its working principle[J]. Chinese Journal of Mechanical Engineering, 2007, 43(11): 177-182. doi: 10.3901/JME.2007.11.177 [13] YU Chang-miao, WANG Wei-hua, WANG Qing-nian. Damping characteristic and its influence factors in energy regenerative sus-pension[J]. Journal of Jilin University: Engineering and Technology Edition, 2010, 40(6): 1482-1486. [14] YU Chang-miao, WANG Wei-hua, WANG Qing-nian. Design of electromagnetic energy regenerative suspension system and analysis of energy conservation[J]. Automobile Technology, 2010(2): 21-25. [15] HUANG Kun, YU Fan, ZHANG Yong-chao. Active control of energy-regenerative electromagnetic suspension based on energy flow analysis[J]. Journal of Shanghai Jiaotong University, 2011, 45(7): 1068-1073. [16] TAO Yong-hua. Application of New PID Control[M]. 2nd Edition. Beijing: China Machine Press, 2003. [17] ZENG Jie-ru, GU Zheng-qi, LI Wei-ping, et al. A research on the fuzzy PID control for vehicle semi-active suspension based on genetic algorithm[J]. Automotive Engineering, 2010, 32(5): 429-433. [18] WANG Chen, WANG Shi-cheng. Parameters setting of PIDcontroller based on genetic algorithm[J]. Computer Simulation, 2005, 22(10): 112-114, 143. [19] JIN Y, YU D J. Adaptive neuron control using an integrated error approach with application to active suspensions[J]. International Journal of Automotive Technology, 2008, 9(3): 329-335. doi: 10.1007/s12239-008-0040-7 [20] CHEN Shi-an, QIU Feng, HE Ren, et al. A method for choosing weights in a suspension LQG control[J]. Journal of Vibration and Shock, 2008, 27(2): 65-68, 176. -


 点击查看大图
点击查看大图
图(8) / 表(6)
计量
- 文章访问数: 809
- HTML全文浏览量: 127
- PDF下载量: 738
- 被引次数: 0
